一種圖像預(yù)配準和多準則誤匹配抑制的三維點云配準方法
本發(fā)明涉及點云配準,特別是涉及一種圖像預(yù)配準和多準則誤匹配抑制的三維點云配準方法。
背景技術(shù):
1、點云配準是指通過估計點云之間的剛體變換關(guān)系,將不同視角采集的點云數(shù)據(jù)變換到統(tǒng)一參考坐標系。它是工業(yè)檢測、機器人環(huán)境感知、三維場景重建等高階信息獲取任務(wù)的基礎(chǔ)。近年,隨著智能化生產(chǎn)線、無人駕駛等技術(shù)的快速發(fā)展,人們對點云配準的要求越來越高。
2、國內(nèi)外學(xué)者針對不同的應(yīng)用場景需求,發(fā)展了大量點云配準方法,根據(jù)配準過程中是否依賴于特征提取和匹配,可分為基于特征的配準方法和無特征的配準方法兩大類。基于特征的配準方法首先提取具有辨識度和穩(wěn)定性的關(guān)鍵特征點,然后利用這些特征點建立點云間的對應(yīng)關(guān)系完成配準,又可分為基于物理輔助的方法和基于點云幾何特征的方法。基于物理輔助的方法是依賴標志點或高精度運動機構(gòu)計算變換矩陣。基于點云幾何特征的方法是依據(jù)點鄰域信息對特征進行描述,建立點的特征描述子,以此確定兩幅點云的對應(yīng)關(guān)系完成配準。he等根據(jù)點的幾何特征定義點的交叉熵,利用統(tǒng)計方法選擇交叉熵趨于中間值的點作為配準點完成配準。zhao等基于局部參考軸和平均法線偏差值提出一種局部正態(tài)偏差統(tǒng)計直方圖描述符,在多個公開數(shù)據(jù)集中取得了良好的配準效果。
3、與基于特征的方法不同,無特征的配準方法不依賴于特征的提取和匹配。代表性的方法包括基于迭代最近點(iterative?closest?point,?icp)法、基于概率的方法和基于窮舉思想的方法。besl等提出的icp是一種經(jīng)典的點云配準方法,該方法將兩片點云中距離最小的點對視為對應(yīng)點,并迭代優(yōu)化以使點對集的距離誤差函數(shù)收斂至最小值估計變換矩陣,精度高但對初始位姿要求嚴格。為了提升icp算法的性能,國內(nèi)外學(xué)者提出了多種改進算法,chetverikov等提出的trimmed?icp算法使用重疊率系數(shù)去除離群點,有效配準低重疊率點云。lv等通過加權(quán)正負測點距離函數(shù)減少異常點的影響。基于統(tǒng)計學(xué)概率的方法最具代表性的是magnusson等提出的正態(tài)分布變換算法(the?normal?distributionstransform,?ndt),它通過概率密度函數(shù)估計點云分布,盡管效率高,但對初值敏感。基于窮舉思想的方法最具代表性的是aiger等提出的4pcs?(four?point?congruent?set),它通過搜索全等的4點集來確定最佳剛體變換。
4、基于物理輔助、基于點云幾何特征以及基于窮舉思想的方法配準精度不高,但魯棒性好;基于icp和基于ndt的方法精度高,但對初值敏感。在工程實際中,為了獲得更好的匹配效果,工程應(yīng)用中常常采用“粗-精”兩步結(jié)合的方法。王曉明等提出了基于?harris?特征的粗配準與?ndt-icp?精配準的快速配準策略,已成功應(yīng)用于大型跨拱梁組合結(jié)構(gòu)鋼箱拱預(yù)制件的尺寸檢測。li等首先通過相似局部區(qū)域之間的相互投影建立初始配準點集,然后通過剛性變換一致性約束確定最終配準點集實現(xiàn)高精度配準。唐毓陽等提出了一種基于pca?的粗配準和基于?kd-icp?的精配準相結(jié)合的點云配準方法,以這一方法為基礎(chǔ),實現(xiàn)了旋翼槳葉扭角的準確。
5、上述研究均在一定程度上提高了點云配準算法的性能,在重疊度較大、被測圖像表面視覺特征質(zhì)量較高時擁有良好的配準正確率。但在零件自動化柔性檢測線等應(yīng)用場合中,兩片點云的重疊區(qū)域難以嚴格保證或者保證重疊區(qū)域會嚴重影響到效率;被測對象表面視覺特征也通常不夠豐富和明顯。當(dāng)兩片點云的重疊率有限(<50%)、目標表面特征缺乏時上述方法均難以實現(xiàn)高精度和高效率的點云配準。因此,在較低重疊率的情況下如何快速找到重疊區(qū)域并確保正確的變換關(guān)系完成配準仍是當(dāng)下的熱點問題。
技術(shù)實現(xiàn)思路
1、針對上述要解決的技術(shù)問題,本發(fā)明提供一種圖像預(yù)配準和多準則誤匹配抑制的三維點云配準方法,能實現(xiàn)重疊率有限、表明特征缺乏的點云高效率和高精度配準。
2、為解決上述技術(shù)問題,本發(fā)明提出的技術(shù)方案為:
3、一種圖像預(yù)配準和多準則誤匹配抑制的三維點云配準方法,包括三個階段:數(shù)據(jù)采集、紋理圖像預(yù)配準、三維點云配準,具體包括以下步驟:
4、步驟s1,數(shù)據(jù)采集階段,投影散斑圖像覆蓋待測零件表面,采集待測物表面點云數(shù)據(jù)及其對應(yīng)的二維圖像;
5、步驟s2,紋理圖像預(yù)配準階段,首先,對兩幀不同視角圖像進行最佳配準區(qū)域定位,并僅對該區(qū)域進行特征點檢測與配準,抑制兩幀圖像不重合區(qū)域信息帶來的不利影響,然后采用距離約束和單應(yīng)性矩陣的隨機采樣一致性對錯誤匹配點進行抑制得到最終的二維匹配點對;
6、步驟s3,三維點云配準階段,通過紋理圖像預(yù)配準得到的二維匹配點對和坐標變換關(guān)系計算得到對應(yīng)的三維匹配點對,基于剛體變換矩陣的隨機采樣一致性對錯誤匹配進行抑制,計算變換矩陣完成粗配準;最后采用經(jīng)典的icp算法完成點云的精配準。
7、作為上述技術(shù)方案地進一步改進為:
8、優(yōu)選地,所述步驟s2中,具體包括以下內(nèi)容:
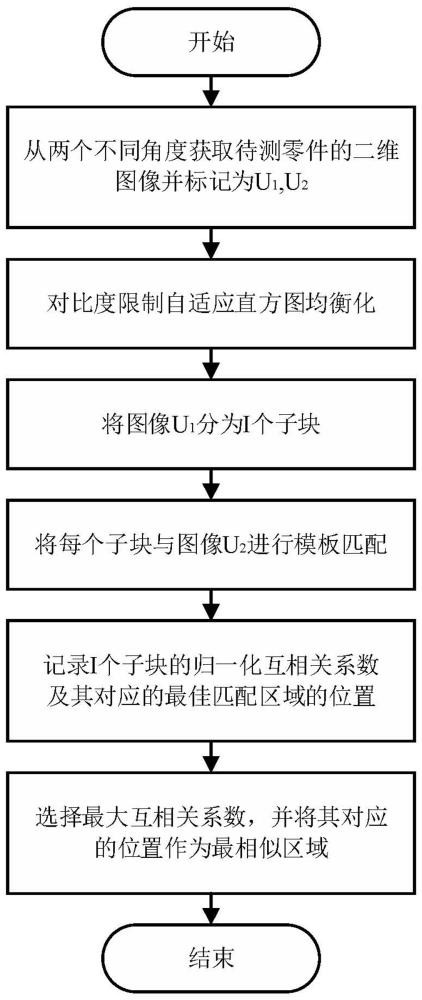
9、s2-1,最佳配準區(qū)域定位:
10、首先找到兩幀圖像的最相似區(qū)域作為最佳配準區(qū)域,僅使用最佳配準區(qū)域的信息進行圖像配準,抑制不重合區(qū)域信息帶來的不利影響;然后將與匹配位置歸一化互相關(guān)系數(shù)最大的模板及其對應(yīng)的匹配區(qū)域作為兩個視角圖像的最相似區(qū)域,即最佳配準區(qū)域;
11、s2-2,特征點檢測與配準:
12、采用akaze算法對紋理圖像的最佳匹配區(qū)域進行特征提取;
13、s2-3,圖像錯誤匹配抑制:
14、分別采用距離約束與單應(yīng)性矩陣的采樣一致性對錯誤匹配進行抑制,距離約束錯誤匹配抑制計算匹配點對的特征描述向量之間的距離,將距離過大的匹配點對視為錯誤匹配。
15、優(yōu)選地,所述歸一化互相關(guān)系數(shù)為,計算公式為:
16、;
17、其中,為模板圖像;為模板圖像在圖像中匹配的中心位置,為模板像素灰度值的平均值,為圖像與模板圖像重疊部分像素灰度值的平均值,為模板圖像中的像素橫坐標,取值范圍為[0,],為模板圖像中的像素縱坐標,取值范圍[0,],為模板圖像的左上角在圖像中的橫坐標,為模板圖像的左上角在圖像中的縱坐標,為模板圖像的寬度,為模板圖像的高度;為模板圖像中的像素值在圖像中的實際位置,的取值范圍為[-1,1],為1時表示完全匹配,為-1時表示兩圖像塊之間差別最大。
18、優(yōu)選地,所述特征點檢測與配準包括以下內(nèi)容:
19、s2-2-1,通過非線性擴散濾波器構(gòu)造非線性尺度空間:;
20、其中,表示待提取特征的原始圖像;為進化時間,其值越大則圖像表示越簡單;和分別為散度算子和梯度算子;為傳導(dǎo)函數(shù),其作用是將中局部結(jié)構(gòu)擴散并保留細節(jié)信息;
21、非線性擴散濾波器的顯式表達為:;
22、其中,為經(jīng)過一次顯示擴散迭代后的圖像,為進化時刻的進化圖像;為單位矩陣;為時間步長;為圖像的傳導(dǎo)矩陣,a為離散后的擴散算子;采用快速顯示擴散進行求解,得原始圖像的非線性尺度空間;
23、s2-2-2,計算不同非線性尺度下圖像的hessian矩陣,得到hessian矩陣后,akaze算法通過尋找非線性尺度空間中的局部極值完成特征點檢測;
24、s2-2-3,采用m-ldb描述符生成特征點描述向量,并通過暴力匹配完成圖像最佳配準區(qū)域的特征點匹配。
25、優(yōu)選地,所述步驟s3中,具體包括以下步驟:
26、s3-1,二維匹配點對的三維投影:
27、得到匹配點對的二維坐標后,結(jié)合對應(yīng)的深度圖像和坐標變化關(guān)系,計算匹配點對在三維空間中的坐標;
28、s3-2,匹配點對的錯誤匹配抑制和點云粗配準:
29、基于ransac算法,進行點云變換矩陣的采樣一致性錯誤匹配抑制過程,找到內(nèi)點數(shù)目最多的最優(yōu)變換矩陣,并輸出對應(yīng)的內(nèi)點集;得到的內(nèi)點集即為錯誤匹配抑制后的三維匹配點對,經(jīng)過錯誤匹配抑制后的三維匹配點對的匹配情況,運用奇異值分解的方法求解該匹配情況下源點云和目標點云之間的變換關(guān)系,即點云之間的旋轉(zhuǎn)和平移變換矩陣;最后,根據(jù)旋轉(zhuǎn)和平移變換矩陣對源點云進行坐標變換,將源點云與目標點云轉(zhuǎn)換到同一坐標系下,完成點云粗配準;
30、s3-3,預(yù)先提取重疊區(qū)域的icp精配準:
31、先運用最近鄰搜索算法提取待配準點云的重疊區(qū)域,并對點云進行降采樣,再使用icp算法計算兩片點云的最優(yōu)變換矩陣完成精配準。
32、優(yōu)選地,所述點云變換矩陣的采樣一致性錯誤匹配抑制過程為:在三維匹配點對中隨機選取6個點對作為樣本點,利用樣本點的三維坐標及其對應(yīng)關(guān)系計算剛體變換矩陣,通過計算剩余匹配點對在變換后的對應(yīng)位置,并計算他們之間的距離,若某匹配點對的距離小于預(yù)設(shè)的閾值ts,則認為該點對為內(nèi)點,反之視為外點;重復(fù)上述步驟,直到達到最大迭代次數(shù)kb時,找到內(nèi)點數(shù)目最多的最優(yōu)變換矩陣,并輸出對應(yīng)的內(nèi)點集。
33、優(yōu)選地,所述最近鄰搜索算法提取待配準點云重疊區(qū)域的過程如下:
34、首先,為源點云和目標點云分別構(gòu)建兩個kd-tree對于源點云中的每個點,通過在目標點云的kd-tree中進行最近鄰搜索,找到其最近鄰點,并計算和之間的距離;然后判斷和之間的距離是否小于距離閾值,如果是,則將和認定為匹配點對,所在區(qū)域視為兩片點云的重疊區(qū)域,如果是否,則認為其為錯誤匹配點對,并舍棄該匹配點對;對兩片點云中的所有點重復(fù)以上步驟,得到兩片點云的整個重疊區(qū)域。
35、優(yōu)選地,所述icp算法計算兩片點云的最優(yōu)變換矩陣完成精配準,步驟為:
36、(1)在重疊區(qū)域內(nèi),為源點云中的每個點找到目標點云中的最近點;
37、(2)根據(jù)最近點對計算點云之間的旋轉(zhuǎn)矩陣r和平移向量t,并將計算得到的變換矩陣應(yīng)用到源點云,更新其位置;更新后源點云與目標點云之間對應(yīng)點對的歐氏距離的均方誤差為:
38、;
39、其中,?為重疊區(qū)域最近鄰點對個數(shù),和分別為某一最近鄰點對位于源點云和目標點云中的點;
40、(3)設(shè)置誤差閾值和最大迭代次數(shù)kc,若或達到最大迭代次數(shù)kc,則停止迭代,獲得最終的變換矩陣,否則返回到第(1)步。
41、本發(fā)明提供的圖像預(yù)配準和多準則誤匹配抑制的三維點云配準方法,與現(xiàn)有技術(shù)相比,有以下優(yōu)點:
42、本發(fā)明的圖像預(yù)配準和多準則誤匹配抑制的三維點云配準方法,首先依據(jù)非重疊區(qū)域信息抑制的二維圖像預(yù)配準結(jié)果實現(xiàn)三維點云粗配,通過最佳區(qū)域定位和akaze特征提取算法完成重疊區(qū)域識別和位置變換估計,此方法有效的抑制了由于現(xiàn)場光照變化和紋理特征缺乏引起的誤匹配,使其在有限重疊率的情況下也能取得很好的對齊。本發(fā)明采用經(jīng)典的icp算法實現(xiàn)點云精配準,在圖像預(yù)配準和點云粗配準階段集成了多種錯誤匹配抑制策略來提高配準的精度和效率。
- 還沒有人留言評論。精彩留言會獲得點贊!