自適應(yīng)隨壟電液控制系統(tǒng)、控制方法及移栽機(jī)與流程
本發(fā)明涉及電液控制,尤其涉及一種自適應(yīng)隨壟電液控制系統(tǒng)、控制方法及移栽機(jī)。
背景技術(shù):
1、移栽機(jī)的主要功能為將苗圃中培育的作物幼苗移植到農(nóng)田,為適應(yīng)山嶺丘陵地區(qū)起伏、傾斜的壟面變化,移栽機(jī)需具備自動調(diào)高、調(diào)平功能,從而保證作物幼苗栽種深度、直立度一致。傳統(tǒng)的移栽機(jī)在進(jìn)行調(diào)高、調(diào)平時,只對栽種部件進(jìn)行調(diào)節(jié),不能應(yīng)對地形變化較大時對車架造成的傾斜,若在云貴地區(qū)丘陵田壟上工作,地形起伏較大,車身大角度傾斜容易造成車身側(cè)翻,因此,現(xiàn)有移栽機(jī)不能適應(yīng)地形起伏較大的工作場景。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供一種自適應(yīng)隨壟電液控制系統(tǒng)、控制方法及移栽機(jī),用以解決傳統(tǒng)移栽機(jī)不能自動適應(yīng)地形起伏較大的工作場景的缺陷。
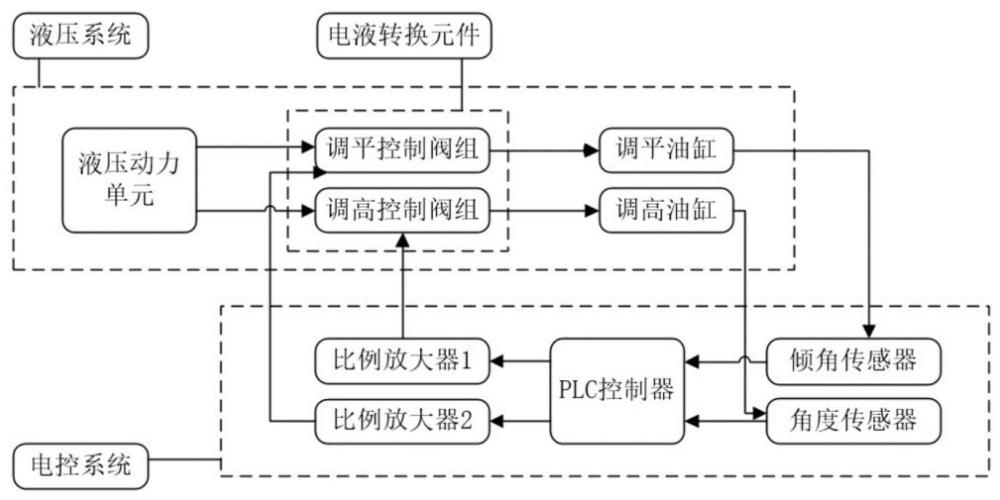
2、本發(fā)明提供一種自適應(yīng)隨壟電液控制系統(tǒng),包括:
3、液壓動力單元、調(diào)平模組、調(diào)高模組、探桿、角度傳感器、傾角傳感器和控制器;
4、所述探桿布設(shè)在車身之前,用于輔助檢測栽苗鴨嘴距地高度;
5、所述角度傳感器用于檢測探桿與地面之間的角度;
6、所述傾角傳感器用于檢測車身的傾斜角度;
7、所述控制器用于根據(jù)所述探桿與地面之間的角度以及所述車身的傾斜角度輸出控制信號;
8、所述液壓動力單元用于為所述調(diào)平模組和/或所述調(diào)高模組提供液壓動力;
9、所述調(diào)平模組和/或所述調(diào)高模組用于根據(jù)所述控制信號對車架進(jìn)行調(diào)平和/或調(diào)高。
10、根據(jù)本發(fā)明提供的自適應(yīng)隨壟電液控制系統(tǒng),所述調(diào)平模組包括:
11、調(diào)平比例電磁閥、調(diào)平油缸和調(diào)平比例放大器;
12、所述調(diào)平比例放大器用于驅(qū)動所述調(diào)平比例電磁閥的閥芯開度;
13、所述調(diào)平比例電磁閥的閥芯開度用于控制所述調(diào)平油缸的伸縮速度比例;
14、所述調(diào)平油缸用于根據(jù)伸縮速度比例對車架進(jìn)行調(diào)平。
15、根據(jù)本發(fā)明提供的自適應(yīng)隨壟電液控制系統(tǒng),所述調(diào)高模組包括:
16、調(diào)高比例電磁閥、調(diào)高油缸和調(diào)高比例放大器;
17、所述調(diào)高比例放大器用于驅(qū)動所述調(diào)高比例電磁閥的閥芯開度;
18、所述調(diào)高比例電磁閥的閥芯開度用于控制所述調(diào)高油缸的伸縮速度比例;
19、所述調(diào)高油缸用于根據(jù)伸縮速度比例對車架進(jìn)行調(diào)高,以使所述栽苗鴨嘴距地高度變化量小于預(yù)設(shè)閾值。
20、根據(jù)本發(fā)明提供的自適應(yīng)隨壟電液控制系統(tǒng),還包括控制閥組,所述控制閥組包括帶有閉鎖功能的液壓元件,所述帶有閉鎖功能的液壓元件包括液控單向閥和平衡閥;
21、所述液控單向閥和平衡閥用于使調(diào)平油缸或調(diào)高油缸保持在預(yù)設(shè)位置。
22、根據(jù)本發(fā)明提供的自適應(yīng)隨壟電液控制系統(tǒng),所述控制閥組,還包括:三位四通換向閥和兩個二位三通節(jié)流閥;
23、所述三位四通換向閥和兩個二位三通節(jié)流閥用于控制油缸伸出或縮回。
24、本發(fā)明還提供一種自適應(yīng)隨壟電液控制方法,適用于上述任一項(xiàng)所述的自適應(yīng)隨壟電液控制系統(tǒng),包括:
25、獲取用于輔助檢測栽苗鴨嘴距地高度的探桿與地面之間的角度以及車身的傾斜角度;
26、根據(jù)所述探桿與地面之間的角度以及車身的傾斜角度向液壓動力單元輸出控制信號,以使液壓動力單元驅(qū)動調(diào)平模組對車架進(jìn)行調(diào)平和/或調(diào)高模組對所述車架進(jìn)行調(diào)高。
27、根據(jù)本發(fā)明還提供的自適應(yīng)隨壟電液控制方法,所述根據(jù)所述探桿與地面之間的角度以及車身的傾斜角度向所述調(diào)平模組和/或所述調(diào)高模組輸出控制信號,以使液壓動力單元驅(qū)動調(diào)平模組對車架進(jìn)行調(diào)平和/或調(diào)高模組對所述車架進(jìn)行調(diào)高,包括:
28、根據(jù)預(yù)設(shè)的傳感器角度-油缸伸出量-栽苗鴨嘴距地高度的映射關(guān)系,通過pid算法計(jì)算出調(diào)高油缸需要的伸縮量,并將所述調(diào)高油缸需要的伸縮量作為控制信號傳輸給調(diào)高比例放大器;
29、通過所述調(diào)高比例放大器控制所述調(diào)高油缸的伸縮速度比例,以使所述調(diào)高油缸根據(jù)伸縮速度比例對車架進(jìn)行調(diào)高。
30、根據(jù)本發(fā)明還提供的自適應(yīng)隨壟電液控制方法,所述通過所述調(diào)高比例放大器控制所述調(diào)高油缸的伸縮速度比例包括:
31、通過調(diào)高比例放大器根據(jù)預(yù)設(shè)目標(biāo)和傳感器檢測值調(diào)整控制電流值,所述控制電流值傳遞給比例電磁閥的電磁鐵,以使電磁鐵產(chǎn)生相應(yīng)的電磁力;
32、電磁力作用在調(diào)高比例電磁閥的閥芯上,使閥芯移動,改變閥芯的開度;
33、當(dāng)閥芯開度增大時,通過閥口進(jìn)入調(diào)高油缸的液壓油流量增加,使調(diào)高油缸的伸縮速度加快;當(dāng)閥芯開度減小時,通過閥口的液壓油流量減少,調(diào)高油缸的伸縮速度變慢。
34、根據(jù)本發(fā)明還提供的自適應(yīng)隨壟電液控制方法,所述根據(jù)所述探桿與地面之間的角度以及車身的傾斜角度向所述調(diào)平模組和/或所述調(diào)高模組輸出控制信號包括:
35、根據(jù)傾斜角度的變化,通過pid算法計(jì)算出調(diào)平油缸需要的伸縮量,將調(diào)平油缸需要的伸縮量作為控制信號傳輸給調(diào)平比例放大器。
36、本發(fā)明還提供一種移栽機(jī),包括如上述所述的自適應(yīng)隨壟電液控制系統(tǒng)。
37、本發(fā)明提供的一種自適應(yīng)隨壟電液控制系統(tǒng)、控制方法及移栽機(jī),自適應(yīng)隨壟電液控制系統(tǒng)包括液壓動力單元、調(diào)平模組、調(diào)高模組、探桿、角度傳感器、傾角傳感器和控制器;所述探桿布設(shè)在車身之前,用于輔助檢測栽苗鴨嘴距地高度;所述角度傳感器用于檢測探桿與地面之間的角度;所述傾角傳感器用于檢測車身的傾斜角度;所述控制器用于根據(jù)所述探桿與地面之間的角度以及所述車身的傾斜角度輸出控制信號;所述液壓動力單元用于為所述調(diào)平模組和/或所述調(diào)高模組提供液壓動力;所述調(diào)平模組和/或所述調(diào)高模組用于根據(jù)所述控制信號對車架進(jìn)行調(diào)平和/或調(diào)高,通過調(diào)節(jié)車架實(shí)現(xiàn)調(diào)平調(diào)高,可以應(yīng)對農(nóng)作物幼苗栽種過程中壟面起伏大、傾斜的田間工況,保證栽種的深度、直立度一致,自動化程度高,可提高栽種的質(zhì)量和效率。
技術(shù)特征:
1.一種自適應(yīng)隨壟電液控制系統(tǒng),其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的自適應(yīng)隨壟電液控制系統(tǒng),其特征在于,所述調(diào)平模組包括:
3.根據(jù)權(quán)利要求1所述的自適應(yīng)隨壟電液控制系統(tǒng),其特征在于,所述調(diào)高模組包括:
4.根據(jù)權(quán)利要求1所述的自適應(yīng)隨壟電液控制系統(tǒng),其特征在于,還包括控制閥組,所述控制閥組包括帶有閉鎖功能的液壓元件,所述帶有閉鎖功能的液壓元件包括液控單向閥和平衡閥;
5.根據(jù)權(quán)利要求4所述的自適應(yīng)隨壟電液控制系統(tǒng),其特征在于,所述控制閥組,還包括:三位四通換向閥和兩個二位三通節(jié)流閥;
6.一種自適應(yīng)隨壟電液控制方法,其特征在于,適用于權(quán)利要求1~5任一項(xiàng)所述的自適應(yīng)隨壟電液控制系統(tǒng),包括:
7.根據(jù)權(quán)利要求6所述的自適應(yīng)隨壟電液控制方法,其特征在于,所述根據(jù)所述探桿與地面之間的角度以及車身的傾斜角度向所述調(diào)平模組和/或所述調(diào)高模組輸出控制信號,以使液壓動力單元驅(qū)動調(diào)平模組對車架進(jìn)行調(diào)平和/或調(diào)高模組對所述車架進(jìn)行調(diào)高,包括:
8.根據(jù)權(quán)利要求7所述的自適應(yīng)隨壟電液控制方法,其特征在于,所述通過所述調(diào)高比例放大器控制所述調(diào)高油缸的伸縮速度比例包括:
9.根據(jù)權(quán)利要求6所述的自適應(yīng)隨壟電液控制方法,其特征在于,所述根據(jù)所述探桿與地面之間的角度以及車身的傾斜角度向所述調(diào)平模組和/或所述調(diào)高模組輸出控制信號包括:
10.一種移栽機(jī),其特征在于,包括如權(quán)利要求1~5任一項(xiàng)所述的自適應(yīng)隨壟電液控制系統(tǒng)。
技術(shù)總結(jié)
本發(fā)明提供一種自適應(yīng)隨壟電液控制系統(tǒng)、控制方法及移栽機(jī),自適應(yīng)隨壟電液控制系統(tǒng)包括液壓動力單元、調(diào)平模組、調(diào)高模組、探桿、角度傳感器、傾角傳感器和控制器;探桿布設(shè)在車身之前,輔助檢測栽苗鴨嘴距地高度;角度傳感器檢測探桿與地面之間的角度;傾角傳感器用于檢測車身的傾斜角度;控制器用于根據(jù)探桿與地面之間的角度以及車身的傾斜角度輸出控制信號;液壓動力單元用于為調(diào)平模組和/或調(diào)高模組提供液壓動力;調(diào)平模組和/或調(diào)高模組用于根據(jù)控制信號對車架進(jìn)行調(diào)平和/或調(diào)高,通過調(diào)節(jié)車架實(shí)現(xiàn)調(diào)平調(diào)高,可以應(yīng)對農(nóng)作物幼苗栽種過程中壟面起伏大、傾斜的田間工況,保證栽種的深度、直立度一致,自動化程度高,提高栽種的質(zhì)量和效率。
技術(shù)研發(fā)人員:吳會剛,張新標(biāo),王忠林,楊靜,趙玉貝
受保護(hù)的技術(shù)使用者:北京天瑪智控科技股份有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!