一種用于光伏池塘養殖的蝦蟹投喂裝置的制作方法
本發明涉及水產養殖,具體是涉及一種用于光伏池塘養殖的蝦蟹投喂裝置。
背景技術:
1、光伏池塘養殖是一種結合光伏發電與水產養殖的高效利用模式,能夠在同一空間內實現發電與養殖的協同效應。然而,光伏板的安裝通常需要通過立柱進行支撐,立柱密集分布于池塘水面,既起到固定光伏板的作用,又為光伏系統提供必要的承重結構。在此養殖模式下,由于光伏板和立柱的存在,蝦蟹投喂裝置在實際工作時容易受到立柱分布的阻礙,從而導致飼料無法均勻投放至池塘水面,影響蝦蟹的正常采食。
2、現有的投喂裝置通常采用機械式旋轉噴灑或固定點投放的形式,缺乏針對光伏池塘結構特點的設計。這些裝置在投喂過程中無法有效避讓立柱,導致飼料被阻擋而集中在某些區域,不僅影響飼料利用效率,還可能造成局部水質污染。此外,在水域復雜、立柱分布不均的情況下,傳統裝置投喂范圍有限,易和立柱之間發生沖撞且在投喂裝置行進至較遠區域時,其位置容易被立柱阻擋,難以對投喂裝置進行有效操控,無法滿足現代化光伏池塘養殖的需求。
技術實現思路
1、針對上述問題,提供一種用于光伏池塘養殖的蝦蟹投喂裝置,通過提出一種不僅能夠對飼料進行均勻投喂且能夠根據立柱分布間距進行精準避讓的投喂裝置,從而解決現有投喂設備在對飼料進行投喂無法有效避讓立柱且易和立柱之間發生沖撞的技術問題。
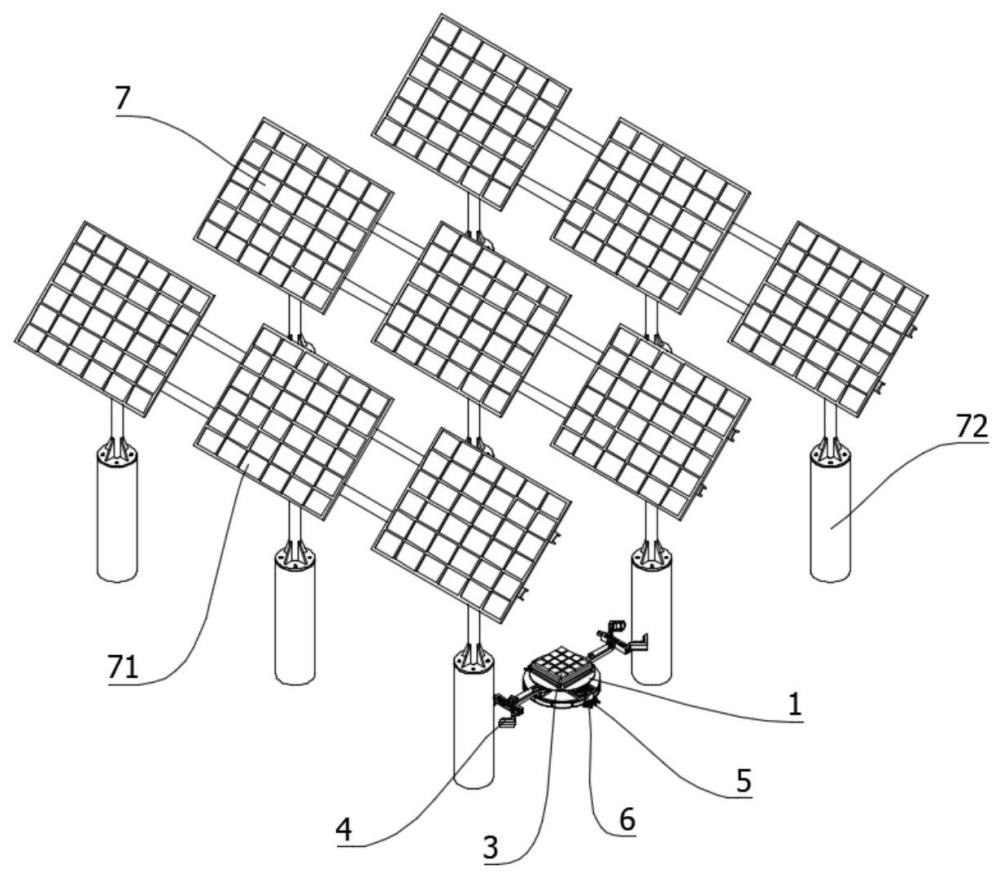
2、為解決現有技術問題,本發明提供一種用于光伏池塘養殖的蝦蟹投喂裝置,包括:基架;驅動模塊,所述驅動模塊居中固定設置于所述基架的下方;投喂模塊,所述投喂模塊相對所述驅動模塊固定設置于所述基架的上方;引導模塊,所述引導模塊設置有兩組,兩組所述引導模塊對稱設置于所述基架的前后兩側;所述引導模塊設有能夠對支撐柱進行抱夾地抱夾單元;矯正模塊,所述矯正模塊設置有兩組,兩組所述矯正模塊對稱設置于所述基架的左右兩側;兩組所述矯正模塊的矯正端分別朝向徑向朝向所述基架的左右兩側設置;監測模塊,所述監測模塊設置有兩組,兩組監測模塊分別豎直固定設置于兩組所述矯正模塊上,且兩組所述監測模塊的檢測端分別徑向朝向所述基架的左右兩側設置。
3、優選的,驅動模塊包括連接架、浮環、固定座、舵機和驅動槳;所述浮環通過連接架居中固定設置于所述基架的下方;所述舵機通過固定座居中固定設置于所述基架的下方且位于所述浮環內;所述驅動槳固定設置于所述舵機的驅動端,所述驅動槳用以驅使所述基架移動。
4、優選的,所述引導模塊還包括有能夠驅使所述抱夾單元徑向靠近或遠離基架的直線驅動單元;所述直線驅動單元通過調節座水平固定設置于所述基架上且靠近所述基架邊緣設置;所述抱夾單元水平固定設置于所述直線驅動單元的驅動端且與所述直線驅動單元的驅動端呈垂直設置。
5、優選的,直線驅動單元包括固定套桿、伸縮桿、延伸板和電動推桿;所述固定套桿呈水平狀態固定設置于所述基架上且靠近所述基架的邊緣設置;所述伸縮桿滑動設置于所述固定套桿內;所述電動推桿沿著所述固定套桿的長邊方向平行固定設置于所述固定套桿上,且所述電動推桿的驅動端與垂直設置于所述伸縮桿前端的延伸板固定連接。
6、優選的,抱夾單元包括導向座、雙向絲桿、伺服電機、第一抱夾臂和第二抱夾臂;所述導向座呈水平狀態垂直固定設置于所述直線驅動單元前端;所述雙向絲桿轉動設置于所述導向座內;所述伺服電機固定設置于所述導向座一端且輸出軸與所述雙向絲桿傳動連接;所述第一抱夾臂和第二抱夾臂呈對稱狀態滑動設置于所述導向座內,且所述第一抱夾臂和第二抱夾臂的連接端分別與所述雙向絲桿傳動連接并分別靠近所述導向座的兩端設置。
7、優選的,所述第一抱夾臂由依次固定連接的連接部、限位部和嵌入式安裝于所述限位部內的轉動部組成;所述連接部滑動設置于所述導向座內,且所述連接部表面貫穿開設有供雙向絲桿穿過的螺紋孔;所述限位部固定設置于所限位部的前端,所述連接部呈v字形設置其夾角為直角設置;所述轉動部設置有多組,多組轉動部沿著所述限位部的長邊方向等距嵌入式安裝于所述限位部內側。
8、優選的,所述轉動部為轉動輥。
9、優選的,所述投喂模塊為氣動式投飼機。
10、優選的,矯正模塊包括安裝架、自吸泵和噴嘴;
11、所述自吸泵通過安裝架呈水平狀態固定設置于所述基架上且靠近所述基架邊緣設置;所述噴嘴垂直設置于所述安裝架上且靠近所述安裝架底部設置;所述噴嘴和自吸泵之間通過傳輸管路連通。
12、優選的,所述監測模塊包括第一測距傳感器和第二測距傳感器;所述第一測距傳感器和第二測距傳感器分別呈豎直狀態居中設置于所述基架的左右兩側,且所述第一測距傳感器和第二測距傳感器分別靠近所基架的左右兩側邊緣設置。
13、本發明相比較于現有技術的有益效果是:
14、1、本發明通過轉動部和抱夾模塊的配合,解決了現有技術中投喂裝置無法有效避讓支撐柱的問題;利用轉動輥與第一抱夾臂和第二抱夾臂的配合,既能有效夾持支撐柱,又賦予支撐柱軸向轉動自由度,從而避免了支撐柱位置變動對投喂軌跡精度的影響;大幅提高了投喂裝置在光伏池塘中工作時的精度和適應性。
15、2、本發明通過在基架上設置第一測距傳感器和第二測距傳感器,實現了如何實時對基架與支撐柱之間的距離進行實時檢測,從而有效監控基架的前進路徑是否偏離;當出現偏移時,能夠通過自動校正模塊進行路徑調整,確保投喂裝置能夠沿著預定路徑行進,避免了傳統設備路徑偏移導致的投喂不準確問題。
技術特征:
1.一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,包括:
2.根據權利要求1所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,驅動模塊(2)包括連接架(21)、浮環(22)、固定座(23)、舵機(24)和驅動槳(25);
3.根據權利要求1所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,所述引導模塊(4)還包括有能夠驅使所述抱夾單元(41)徑向靠近或遠離基架(1)的直線驅動單元(42);
4.根據權利要求3所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,直線驅動單元(42)包括固定套桿(421)、伸縮桿(422)、延伸板(423)和電動推桿(424);
5.根據權利要求3所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,抱夾單元(41)包括導向座(411)、雙向絲桿(412)、伺服電機(413)、第一抱夾臂(414)和第二抱夾臂(415);
6.根據權利要求5所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,所述第一抱夾臂(414)由依次固定連接的連接部(4141)、限位部(4142)和嵌入式安裝于所述限位部(4142)內的轉動部(4143)組成;
7.根據權利要求6所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,所述轉動部(4143)為轉動輥。
8.根據權利要求1所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,所述投喂模塊(3)為氣動式投飼機。
9.根據權利要求1所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,矯正模塊(5)包括安裝架(51)、自吸泵(52)和噴嘴(53);
10.根據權利要求1所述的一種用于光伏池塘養殖的蝦蟹投喂裝置,其特征在于,所述監測模塊(6)包括第一測距傳感器(61)和第二測距傳感器(62);
技術總結
本發明涉及水產養殖技術領域,具體是涉及一種用于光伏池塘養殖的蝦蟹投喂裝置,包括:基架;驅動模塊,所述驅動模塊居中固定設置于所述基架的下方;投喂模塊,所述投喂模塊相對所述驅動模塊固定設置于所述基架的上方;引導模塊,所述引導模塊設置有兩組,兩組所述引導模塊對稱設置于所述基架的前后兩側;所述引導模塊設有能夠對支撐柱進行抱夾地抱夾單元;矯正模塊,所述矯正模塊設置有兩組,兩組所述矯正模塊對稱設置于所述基架的左右兩側;監測模塊,所述監測模塊設置有兩組,兩組監測模塊分別豎直固定設置于兩組所述矯正模塊上;本發明不僅能夠對立柱進行精準避讓且能夠利用立柱進行環繞式交替投喂。
技術研發人員:張冬平,蔡少磊,章鴻鳩,張俊浩,陳東升,鞠方旭,樊盼,祁瀟,仇建偉,賴智臻,鮑恩財
受保護的技術使用者:浙江龍源新能源發展有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!