超聲刀輔助禽胴體多部位柔性仿人切分裝置及方法
本發(fā)明涉及禽類原料肉前處理智能加工,尤其涉及一種超聲刀輔助禽胴體多部位柔性仿人切分裝置及方法。
背景技術(shù):
1、隨著菜肴工業(yè)化發(fā)展對原料肉前處理提出了更高的標(biāo)準(zhǔn)化要求,尤其對禽胴體如脖子、翅膀、腿等不同部位的精準(zhǔn)切割切分已成為產(chǎn)業(yè)的迫切需要,而目前禽胴體多部位切割切分多采用人工輔助流水線的方式,存在勞動強(qiáng)度大、生產(chǎn)效率低、智能化程度低等問題,難以滿足產(chǎn)業(yè)需求。
技術(shù)實(shí)現(xiàn)思路
1、針對現(xiàn)有技術(shù)存在的問題,本發(fā)明提供一種超聲刀輔助禽胴體多部位柔性仿人切分裝置及方法。
2、第一方面,本發(fā)明提供一種超聲刀輔助禽胴體多部位柔性仿人切分裝置,包括:
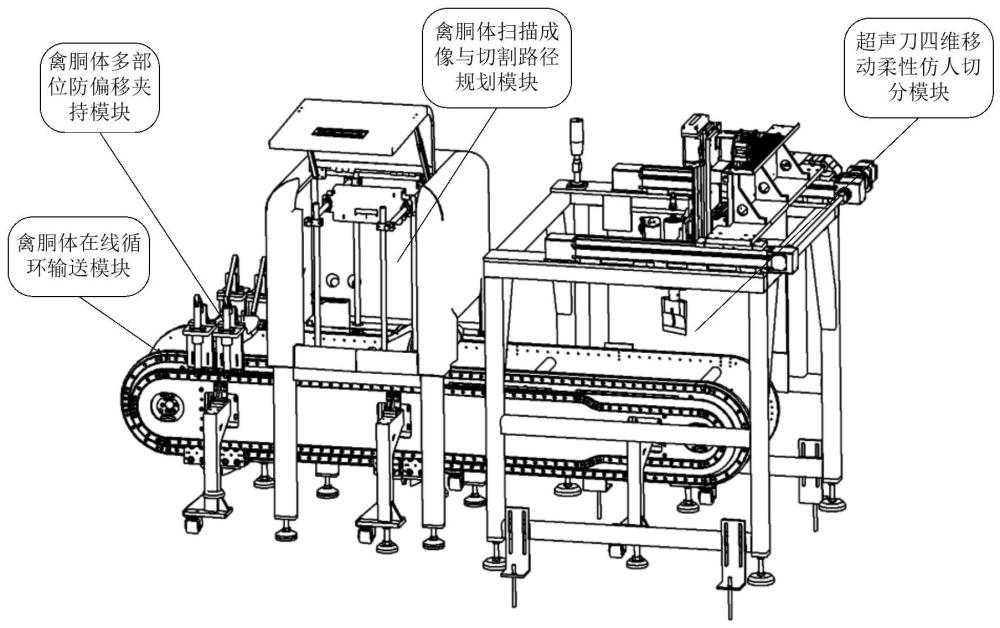
3、禽胴體在線循環(huán)輸送模塊,包括立式雙軌環(huán)形導(dǎo)軌輸送線和異型環(huán)形導(dǎo)軌;
4、禽胴體多部位防偏移夾持模塊,安裝在所述立式雙軌環(huán)形導(dǎo)軌輸送線上,用于多點(diǎn)位固定禽胴體各個部位,使所述禽胴體隨著所述立式雙軌環(huán)形導(dǎo)軌輸送線依次移動至掃描工位和切分工位,并在通過所述切分工位后受所述異型環(huán)形導(dǎo)軌的作用控制夾具松開并分別收集所述禽胴體的各個部位;
5、禽胴體掃描成像與切割路徑規(guī)劃模塊,包括掃描成像設(shè)備和與所述掃描成像設(shè)備連接的上位機(jī),所述掃描成像設(shè)備用于對移動至所述掃描工位的所述禽胴體進(jìn)行掃描成像,所述上位機(jī)用于根據(jù)掃描得到的圖像數(shù)據(jù)對禽胴體多部位進(jìn)行精準(zhǔn)選域,生成所述禽胴體的多部位柔性切割路徑規(guī)劃指令集,并將所述多部位柔性切割路徑規(guī)劃指令集發(fā)送至超聲刀四維移動柔性仿人切分模塊的下位機(jī);
6、所述超聲刀四維移動柔性仿人切分模塊,包括與所述上位機(jī)通信連接的所述下位機(jī),以及由所述下位機(jī)控制的四軸平臺超聲刀切分設(shè)備,所述四軸平臺超聲刀切分設(shè)備包括四軸運(yùn)動平臺和搭載于所述四軸運(yùn)動平臺上的超聲刀頭,所述下位機(jī)用于根據(jù)接收的所述多部位柔性切割路徑規(guī)劃指令集,控制所述四軸平臺超聲刀切分設(shè)備對移動至所述切分工位的所述禽胴體的多部位進(jìn)行柔性仿人切分。
7、在一些實(shí)施例中,所述異型環(huán)形導(dǎo)軌包括第一部位、第二部位和位于所述第一部位和所述第二部位之間的臺階,所述第一部位和所述第二部位均包括弧形段和平行直線段,且所述第一部位的平行直線段的間距大于所述第二部位的平行直線段的間距。
8、在一些實(shí)施例中,所述禽胴體多部位防偏移夾持模塊包括:
9、用于承載所述禽胴體的托盤,所述托盤固定在所述立式雙軌環(huán)形導(dǎo)軌輸送線的滑座上,所述托盤包括位于中間的凹陷部位以及位于周邊的四個支撐結(jié)構(gòu),所述四個支撐結(jié)構(gòu)均朝向所述托盤外向下傾斜,夾具打開時便于分類收集所述禽胴體的各個部位,所述四個支撐結(jié)構(gòu)用于承載所述禽胴體的四肢,所述托盤的外型根據(jù)所述禽胴體的輪廓設(shè)計;
10、支架,所述支架固定在所述立式雙軌環(huán)形導(dǎo)軌輸送線的滑座上,所述支架上安裝有直線軸承;
11、位移調(diào)整板,立設(shè)于所述支架上;
12、壓桿,所述壓桿安裝在所述位移調(diào)整板上,所述壓桿的第一端設(shè)置有接觸塊,所述接觸塊在固定所述禽胴體時與所述禽胴體的四肢接觸;
13、連桿,所述連桿穿過所述直線軸承,所述連桿的第一端與所述壓桿的第二端連接,所述連桿的第二端與所述異型環(huán)形導(dǎo)軌連接并可沿所述異型環(huán)形導(dǎo)軌滑動,所述連桿的第二端位于所述異型環(huán)形導(dǎo)軌的所述第一部位時,抬升所述壓桿的第二端,使所述壓桿的第一端帶動所述接觸塊下壓,所述連桿的第二端由所述異型環(huán)形導(dǎo)軌的所述臺階過渡到所述第二部位時,拉低所述壓桿的第二端,使所述壓桿的第一端帶動所述接觸塊上抬。
14、在一些實(shí)施例中,所述掃描成像設(shè)備包括三維線激光掃描儀和x光檢測機(jī)。
15、在一些實(shí)施例中,所述根據(jù)掃描得到的圖像數(shù)據(jù)對禽胴體多部位進(jìn)行精準(zhǔn)選域,生成所述禽胴體的多部位柔性切割路徑規(guī)劃指令集,包括:
16、利用目標(biāo)檢測模型對所述三維線激光掃描儀得到的禽胴體深度圖像進(jìn)行各切割部位的選域識別,根據(jù)識別結(jié)果和所述各切割部位的切割順序,規(guī)劃出所述超聲刀頭的切割路徑,生成所述禽胴體的多部位柔性切割路徑規(guī)劃指令集;
17、其中,所述目標(biāo)檢測模型是基于帶有切割部位識別標(biāo)簽的樣本禽胴體深度圖像訓(xùn)練得到的。
18、在一些實(shí)施例中,所述根據(jù)識別結(jié)果和所述各切割部位的切割順序,規(guī)劃出所述超聲刀頭的切割路徑,包括:
19、根據(jù)識別結(jié)果、禽胴體切割位置內(nèi)部關(guān)節(jié)的三維坐標(biāo)以及所述各切割部位的切割順序,規(guī)劃出所述超聲刀頭的切割路徑;
20、其中,所述禽胴體切割位置內(nèi)部關(guān)節(jié)的三維坐標(biāo)基于所述x光檢測機(jī)得到的x光圖像中禽胴體骨架結(jié)構(gòu)的坐標(biāo)標(biāo)定得到。
21、在一些實(shí)施例中,所述目標(biāo)檢測模型為yolo模型。
22、在一些實(shí)施例中,所述上位機(jī)還用于根據(jù)掃描得到的圖像數(shù)據(jù)生成所述禽胴體的三維可視化輪廓。
23、在一些實(shí)施例中,所述根據(jù)掃描得到的圖像數(shù)據(jù)生成所述禽胴體的三維可視化輪廓,包括:
24、根據(jù)所述三維線激光掃描儀得到的禽胴體深度圖像進(jìn)行三維重建,生成所述禽胴體的三維可視化輪廓。
25、第二方面,本發(fā)明還提供一種基于第一方面所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置執(zhí)行的切分方法,所述方法包括:
26、所述立式雙軌環(huán)形導(dǎo)軌輸送線啟動,帶動所述禽胴體多部位防偏移夾持模塊上固定的禽胴體移動至掃描工位;
27、所述掃描成像設(shè)備對移動至所述掃描工位的所述禽胴體進(jìn)行掃描成像,將掃描得到的圖像數(shù)據(jù)發(fā)送至所述上位機(jī),所述上位機(jī)根據(jù)所述圖像數(shù)據(jù)對禽胴體多部位進(jìn)行精準(zhǔn)選域,生成所述禽胴體的多部位柔性切割路徑規(guī)劃指令集,并將所述多部位柔性切割路徑規(guī)劃指令集發(fā)送至所述下位機(jī);
28、所述下位機(jī)根據(jù)接收的所述多部位柔性切割路徑規(guī)劃指令集,控制所述四軸平臺超聲刀切分設(shè)備對移動至切分工位的所述禽胴體的多部位進(jìn)行柔性仿人切分,通過所述切分工位后在所述異型環(huán)形導(dǎo)軌的作用下所述夾具松開,所述禽胴體的各個部位進(jìn)行分類收集。
29、本發(fā)明提供的超聲刀輔助禽胴體多部位柔性仿人切分裝置及方法,通過禽胴體在線循環(huán)輸送模塊將其他模塊工位串聯(lián)起來,起循環(huán)往復(fù)作用,大大提高了生產(chǎn)的效率,通過禽胴體多部位防偏移夾持模塊實(shí)現(xiàn)了禽胴體多點(diǎn)位全自動防偏移夾持功能,通過禽胴體掃描成像與切割路徑規(guī)劃模塊實(shí)現(xiàn)了自動根據(jù)掃描結(jié)果進(jìn)行切割路徑的精準(zhǔn)規(guī)劃,通過超聲刀四維移動柔性仿人切分模塊實(shí)現(xiàn)了禽胴體各個部位的精準(zhǔn)柔性仿人切分,從而不僅能夠有效解決目前禽胴體多部位切割切分所存在的勞動強(qiáng)度大、生產(chǎn)效率低、智能化程度低等問題,還能夠進(jìn)一步提高原料肉分切精度、分切效率、智能化水平,并降低損耗,對禽類加工智能化升級、促進(jìn)肉類行業(yè)的產(chǎn)業(yè)升級也具有重大意義。
技術(shù)特征:
1.一種超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述異型環(huán)形導(dǎo)軌包括第一部位、第二部位和位于所述第一部位和所述第二部位之間的臺階,所述第一部位和所述第二部位均包括弧形段和平行直線段,且所述第一部位的平行直線段的間距大于所述第二部位的平行直線段的間距。
3.根據(jù)權(quán)利要求2所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述禽胴體多部位防偏移夾持模塊包括:
4.根據(jù)權(quán)利要求1所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述掃描成像設(shè)備包括三維線激光掃描儀和x光檢測機(jī)。
5.根據(jù)權(quán)利要求4所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述根據(jù)掃描得到的圖像數(shù)據(jù)對禽胴體多部位進(jìn)行精準(zhǔn)選域,生成所述禽胴體的多部位柔性切割路徑規(guī)劃指令集,包括:
6.根據(jù)權(quán)利要求5所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述根據(jù)識別結(jié)果和所述各切割部位的切割順序,規(guī)劃出所述超聲刀頭的切割路徑,包括:
7.根據(jù)權(quán)利要求6所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述目標(biāo)檢測模型為yolo模型。
8.根據(jù)權(quán)利要求4所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述上位機(jī)還用于根據(jù)掃描得到的圖像數(shù)據(jù)生成所述禽胴體的三維可視化輪廓。
9.根據(jù)權(quán)利要求8所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置,其特征在于,所述根據(jù)掃描得到的圖像數(shù)據(jù)生成所述禽胴體的三維可視化輪廓,包括:
10.一種基于權(quán)利要求1至9中任一項所述的超聲刀輔助禽胴體多部位柔性仿人切分裝置執(zhí)行的切分方法,其特征在于,所述方法包括:
技術(shù)總結(jié)
本發(fā)明提供一種超聲刀輔助禽胴體多部位柔性仿人切分裝置及方法,涉及禽類原料肉前處理智能加工技術(shù)領(lǐng)域,裝置包括:禽胴體在線循環(huán)輸送模塊,包括立式雙軌環(huán)形導(dǎo)軌輸送線和異型環(huán)形導(dǎo)軌;禽胴體多部位防偏移夾持模塊,安裝在立式雙軌環(huán)形導(dǎo)軌輸送線上,用于多點(diǎn)位固定禽胴體,通過切分工位后受異型環(huán)形導(dǎo)軌的作用控制夾具松開并分別收集禽胴體部位;禽胴體掃描成像與切割路徑規(guī)劃模塊,用于對禽胴體進(jìn)行掃描成像,根據(jù)掃描得到的圖像數(shù)據(jù)生成切割路徑規(guī)劃指令集并發(fā)送至下位機(jī);超聲刀四維移動柔性仿人切分模塊,包括下位機(jī)及四軸平臺超聲刀切分設(shè)備,下位機(jī)根據(jù)切割路徑規(guī)劃指令集,控制四軸平臺超聲刀切分設(shè)備對禽胴體多部位進(jìn)行柔性仿人切分。
技術(shù)研發(fā)人員:張春暉,魏文松,李俠,王智澤,趙洪濤,胡小佳,喬真,艾鑫,孫勝斌
受保護(hù)的技術(shù)使用者:中國農(nóng)業(yè)科學(xué)院農(nóng)產(chǎn)品加工研究所
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!