一種基于人工智能的超聲影像的氣道管理方法及裝置
本發(fā)明涉及醫(yī)療信息,尤其涉及一種基于人工智能的超聲影像的氣道管理方法及裝置。
背景技術(shù):
1、在手術(shù)麻醉、急診搶救和重癥醫(yī)療領(lǐng)域,保持氣道的開放對于維持患者的呼吸功能,確保患者體內(nèi)的氧氣供應(yīng)至關(guān)重要。然而,患者的氣道管理往往面臨著三個(gè)方面的風(fēng)險(xiǎn):一、術(shù)前氣道條件評估;二、術(shù)中面罩通氣、人工建立氣道困難或失敗;三、術(shù)后氣道并發(fā)癥的識別。
2、患者頭頸部解剖因素可能會使氣道的空間結(jié)構(gòu)受到周圍組織的牽拉、擠壓、扭曲、變形,從而使氣道通暢性受到影響。
3、一些外部視診判定的方法可預(yù)測困難氣道,如面部視診(wilson風(fēng)險(xiǎn)評分:體重、下頜活動度、頭頸部活動度、下頜退縮程度、門齒前突程度)、mallampati分級(i級:可以看到軟腭、懸雍垂、咽腭弓和硬腭;ii級:可以看到軟腭、懸雍垂和部分咽腭弓;iii級:只能看到軟腭和懸雍垂的基部;iv級:只能看到硬腭)。
4、同樣地,還可以采用喉鏡檢查進(jìn)行口腔咽喉內(nèi)部視診評級:如cormack-lehane分級系統(tǒng);該系統(tǒng)根據(jù)喉鏡暴露下所能見到的喉部結(jié)構(gòu)將其分為4級:ⅰ級:能完全顯露聲門;ⅱ級:能看到杓狀軟骨(聲門入口的后壁)和后半部分的聲門;ⅲ級:僅能看到會厭;ⅳ級:看不到會厭。
5、盡管以上方法在臨床上均有采用,但由于外部視診無法直接觀察氣道內(nèi)解剖結(jié)構(gòu),而喉鏡檢查進(jìn)行氣道內(nèi)部視診又破壞了患者靜息或睡眠狀態(tài)下氣道解剖的相對位置關(guān)系,因此單一使用以上氣道評級工具其敏感性和特異性均有限。
6、臨床上導(dǎo)致困難氣道的因素眾多且復(fù)雜,當(dāng)前仍有超過90%的困難氣道屬于常規(guī)臨床診療過程中未預(yù)料到的困難氣道,這反映出目前針對困難氣道的預(yù)先識別不足。不僅如此,和可預(yù)料到的困難氣道相比,未預(yù)料到的困難氣道顯著增加了患者的缺氧風(fēng)險(xiǎn)和氣道管理的緊迫性,決策者往往需要在數(shù)分鐘內(nèi)制定氣道管理決策,然而,大多數(shù)緊急氣道缺乏相關(guān)檢查的指導(dǎo),其決策往往是根據(jù)經(jīng)驗(yàn)進(jìn)行處理,有一定的盲目性。此外,氣道的術(shù)后管理往往被忽視,術(shù)后氣道并發(fā)癥的處理往往不夠及時(shí),如肺不張、肺水腫、氣胸、肺部感染實(shí)變等通常是由患者表現(xiàn)出如低氧血癥、咳嗽咳痰、呼吸困難、發(fā)熱等的臨床癥狀才被進(jìn)一步的胸片、ct或磁共振等影像學(xué)結(jié)果確認(rèn),術(shù)后氣道超聲導(dǎo)向的氣道并發(fā)癥處理往往效率更高,且操作簡單、無輻射傷害,常規(guī)床旁使用將有利于早期識別呼吸系統(tǒng)并發(fā)癥,改善患者預(yù)后。
7、當(dāng)前仍沒有單一評估方法能夠作為困難氣道評估的金標(biāo)準(zhǔn)。臨床上迫切需要開發(fā)一種能夠迅速且準(zhǔn)確識別氣道管理風(fēng)險(xiǎn)的智能化預(yù)警系統(tǒng),且氣道超聲圖文報(bào)告及決策系統(tǒng)將大大縮短氣道評估時(shí)間和準(zhǔn)確性,提高氣道評估和管理的效率,減少醫(yī)療意外,保障患者安全。
8、高分辨率超聲波檢查因其能夠精確地揭示氣道周圍組織的解剖細(xì)節(jié),已經(jīng)成為術(shù)前氣道條件評估、術(shù)中建立人工氣道及術(shù)后氣道并發(fā)癥識別的推薦方法。但是,超聲圖像獲取及解讀技術(shù)要求較高,且過程復(fù)雜,熟練地進(jìn)行氣道超聲標(biāo)準(zhǔn)切面掃查和解讀常常需要長期的學(xué)習(xí)和經(jīng)驗(yàn)積累,這項(xiàng)技術(shù)不利于手術(shù)麻醉、急診搶救和重癥醫(yī)療人員快速掌握。
9、因此,如何能夠快速獲得氣道超聲標(biāo)準(zhǔn)評估是目前亟待解決的技術(shù)問題。
技術(shù)實(shí)現(xiàn)思路
1、鑒于上述問題,本發(fā)明提供了一種克服上述問題或者至少部分地解決上述問題的基于人工智能的超聲影像的氣道管理方法及裝置。
2、第一方面,本發(fā)明提供了一種基于人工智能的超聲影像的氣道管理方法,包括:
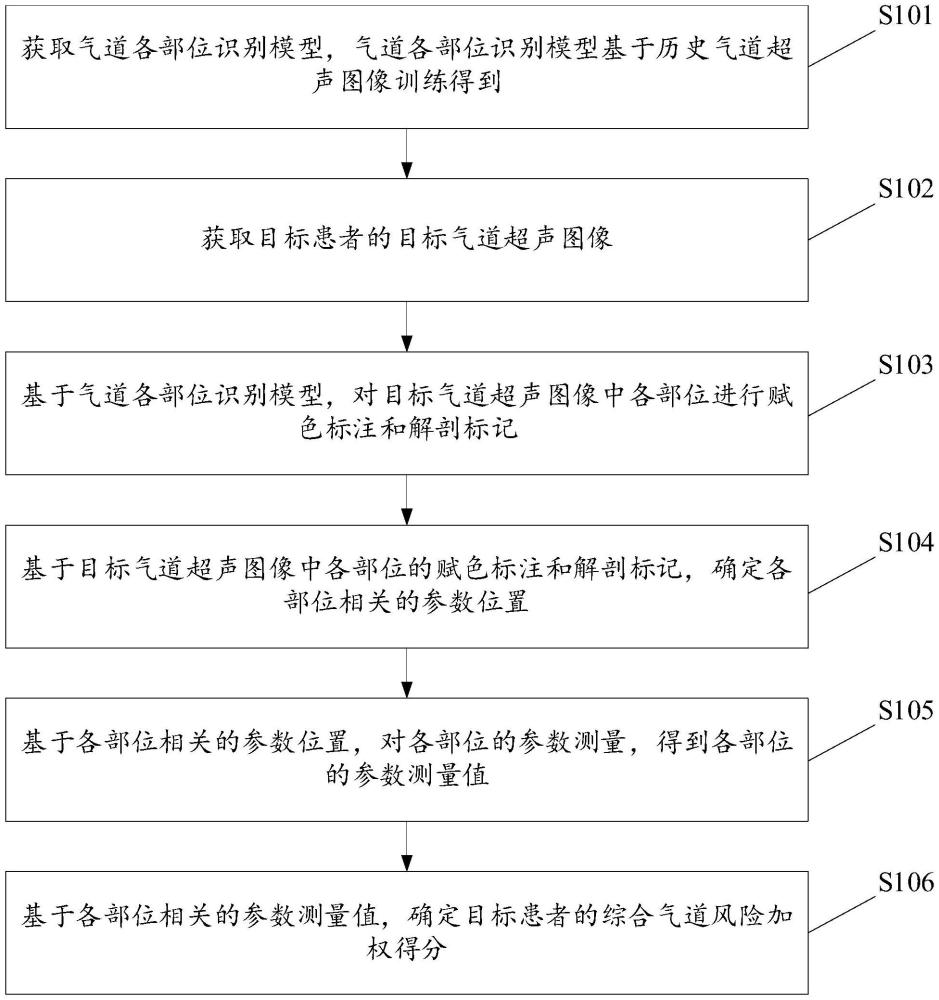
3、獲取氣道各部位識別模型,所述氣道各部位識別模型基于歷史氣道超聲圖像訓(xùn)練得到;
4、獲取目標(biāo)患者的目標(biāo)氣道超聲圖像;
5、基于所述氣道各部位識別模型,對所述目標(biāo)氣道超聲圖像中各部位進(jìn)行賦色標(biāo)注和解剖標(biāo)記;
6、基于所述目標(biāo)氣道超聲圖像中各部位的賦色標(biāo)注和解剖標(biāo)記,確定所述各部位相關(guān)的參數(shù)位置;
7、基于所述各部位相關(guān)的參數(shù)位置,對所述各部位的參數(shù)測量,得到各部位的參數(shù)測量值;
8、基于所述各部位相關(guān)的參數(shù)測量值,確定所述目標(biāo)患者的綜合氣道風(fēng)險(xiǎn)加權(quán)得分。
9、優(yōu)選地,在基于所述各部位的參數(shù)測量值,確定所述目標(biāo)患者的綜合氣道風(fēng)險(xiǎn)加權(quán)得分之后,還包括:
10、基于所述綜合氣道風(fēng)險(xiǎn)加權(quán)得分,進(jìn)行困難氣道預(yù)警,并提供相應(yīng)的氣道管理決策建議。
11、優(yōu)選地,獲取氣道各部位識別模型,包括:
12、獲取歷史氣道超聲圖像,所述歷史氣道超聲圖像經(jīng)手動分割標(biāo)注有各部位名稱;
13、將所述歷史氣道超聲圖像作為輸入數(shù)據(jù),將對應(yīng)標(biāo)注的各部位名稱作為輸出數(shù)據(jù)輸入神經(jīng)網(wǎng)絡(luò)模型中進(jìn)行訓(xùn)練,得到氣道各部位識別模型,并對所述氣道各部位識別模型進(jìn)行驗(yàn)證優(yōu)化。
14、優(yōu)選地,所述各部位名稱,包括:
15、舌體、舌根、舌骨、會厭、會厭前間隙、聲帶、聲門聯(lián)合、甲狀軟骨、環(huán)狀軟骨、甲狀腺、氣管、氣管導(dǎo)管、食管以及胸腔。
16、優(yōu)選地,基于所述各部位相關(guān)的參數(shù)位置,對所述各部位相關(guān)的參數(shù)測量,得到各部位相關(guān)的參數(shù)測量值,包括:
17、基于各部位相關(guān)的參數(shù)位置,對如下各部位的參數(shù)進(jìn)行測量:
18、舌體寬度、舌體厚度、舌體積、皮膚至?xí)挼木嚯x、皮膚至聲帶的距離、皮膚至舌骨的距離、中立位舌骨至頦骨的距離、過伸位舌骨至頦骨的距離、所述中立位舌骨至頦骨的距離與所述過伸位舌骨至頦骨的距離的比值、皮膚至甲狀腺峽部氣管環(huán)的距離;
19、得到所述各部位相關(guān)的參數(shù)測量值。
20、優(yōu)選地,基于所述各部位相關(guān)的參數(shù)測量值,確定所述目標(biāo)患者的綜合氣道風(fēng)險(xiǎn)加權(quán)得分,包括:
21、基于所述各部位相關(guān)的參數(shù)測量值,按照如下計(jì)算公式,確定所述目標(biāo)患者的綜合氣道風(fēng)險(xiǎn)加權(quán)得分:
22、
23、其中,n為參數(shù)測量值的數(shù)量,δi為參數(shù)測量值的權(quán)重,d為偏差函數(shù),jmin,i為參數(shù)測量值的正常參數(shù)值下限,jmax,i為參數(shù)測量值的正常參數(shù)值上限,xi為任意參數(shù)測量值,s為綜合氣道風(fēng)險(xiǎn)加權(quán)得分。
24、優(yōu)選地,所述偏差函數(shù)的定義如下:
25、
26、第二方面,本發(fā)明還提供了一種基于人工智能的超聲影像的氣道管理裝置,包括:
27、第一獲取模塊,用于獲取歷史氣道超聲圖像,所述歷史氣道超聲圖像經(jīng)手動分割標(biāo)注有各部位名稱;
28、第一得到模塊,用于將所述歷史氣道超聲圖像輸入神經(jīng)網(wǎng)絡(luò)模型中進(jìn)行訓(xùn)練,得到氣道各部位識別模型;
29、第二獲取模塊,用于獲取目標(biāo)患者的目標(biāo)氣道超聲圖像;
30、標(biāo)注模塊,用于基于所述氣道各部位識別模型,對所述目標(biāo)氣道超聲圖像中各部位進(jìn)行賦色標(biāo)注和解剖標(biāo)記;
31、第一確定模塊,用于基于所述目標(biāo)氣道超聲圖像中各部位的賦色標(biāo)注和解剖標(biāo)記,確定所述各部位相關(guān)的參數(shù)位置;
32、第二得到模塊,用于基于所述各部位相關(guān)的參數(shù)位置,對所述各部位的參數(shù)測量,得到各部位的參數(shù)測量值;
33、第二確定模塊,用于基于所述各部位的參數(shù)測量值,確定所述目標(biāo)患者的綜合氣道風(fēng)險(xiǎn)加權(quán)得分。
34、第三方面,本發(fā)明還提供了一種計(jì)算機(jī)設(shè)備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運(yùn)行的計(jì)算機(jī)程序,所述處理器執(zhí)行所述程序時(shí)實(shí)現(xiàn)第一方面中所述的方法。
35、第四方面,本發(fā)明還提供了一種計(jì)算機(jī)可讀存儲介質(zhì),其上存儲有計(jì)算機(jī)程序,該程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)第一方面中所述的方法。
36、本發(fā)明實(shí)施例中的一個(gè)或多個(gè)技術(shù)方案,至少具有如下技術(shù)效果或優(yōu)點(diǎn):
37、本發(fā)明提供了一種人工智能的超聲影像的氣道管理方法,包括:獲取歷史氣道超聲圖像,歷史氣道超聲圖像經(jīng)手動分割標(biāo)注有各部位名稱;將歷史氣道超聲圖像輸入神經(jīng)網(wǎng)絡(luò)模型中進(jìn)行訓(xùn)練,得到氣道各部位識別模型;獲取目標(biāo)患者的目標(biāo)氣道超聲圖像;基于氣道各部位識別模型,對目標(biāo)氣道超聲圖像中各部位進(jìn)行賦色標(biāo)注和解剖標(biāo)記;基于目標(biāo)氣道超聲圖像中各部位的賦色標(biāo)注和解剖標(biāo)記,確定各部位相關(guān)的參數(shù)位置;基于各部位相關(guān)的參數(shù)位置,對各部位的參數(shù)測量,得到各部位的參數(shù)測量值;基于各部位的參數(shù)測量值,確定目標(biāo)患者的綜合氣道風(fēng)險(xiǎn)加權(quán)得分,通過人工智能對氣道超聲圖像的賦色標(biāo)注和解剖標(biāo)記,快速確定各部位相關(guān)參數(shù)位置,并得到參數(shù)測量值,進(jìn)而快速得到綜合氣道風(fēng)險(xiǎn)評估結(jié)果,提高了評估效率。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!