一種骨科影像數據分析平臺及方法
本發明涉及骨科影像,具體為一種骨科影像數據分析平臺及方法。
背景技術:
1、隨著現代醫學影像學技術的飛速發展,影像學數據在骨科疾病診斷、治療及預后評估中的作用愈發重要。常見的骨科影像類型包括x光片、ct掃描、mri及超聲影像等。這些影像數據為臨床醫生提供了寶貴的信息,幫助醫生在臨床實踐中做出更為準確的診斷和治療決策,并且隨著計算機視覺和人工智能技術的快速發展,基于圖像識別和深度學習的自動化分析方法已經逐漸興起,并在醫學影像分析領域取得了一定的進展。
2、經檢索,公開號為cn118490364a的中國專利公開了一種全骨科平臺手術機器人及其導航方法,該專利包括核心控制系統為嵌入式高性能微處理器,用于協調各部件間的工作流程,并支持多任務并發處理;模塊化系統,安裝在手術機器人的末端;高精度定位系統,用于實時追蹤手術器械在空間的位置;智能影像融合系統,用于將術前影像與手術現場的實時影像融合,基于融合后的影像數據,規劃和確認手術路徑。
3、在現有技術中,骨科影像數據分析平臺主要聚焦于靜態影像的處理和病變的初步診斷,缺乏個性化和動態跟蹤的能力,影像數據的處理多集中在術前診斷階段,而在患者治療的過程中,未能通過實時影像數據的更新與監測,及時反映受傷部位的變化情況,缺少與患者恢復數據、大數據資源結合的分析能力,因此,本發明提出了一種骨科影像數據分析平臺及方法。
技術實現思路
1、本發明的目的在于提供了一種骨科影像數據分析平臺及方法,以解決上述背景技術中提到的問題。
2、一種骨科影像數據分析平臺,包括:
3、數據采集模塊,利用多個數據單元獲取患者的原始數據,其中,數據采集模塊包括影像數據單元、臨床數據單元和傳感器數據單元;
4、數據處理模塊,利用影像數據處理單元、建模單元和數據監測單元將數據采集模塊采集到的原始數據進行處理和融合,獲得術前模型;
5、導航模塊,對術前模型進行整合后作為手術的基礎導航數據,并且導航模塊在術中實時獲取患者的位置信息,并與術前模型進行對比,進行動態角度匹配和修正。
6、優選的,在數據采集模塊中:
7、影像數據單元,通過相關設備獲取骨科相關的影像數據和患者對應受傷部位的3d成像數據,并將各影像數據和各3d成像數據分別集合配置為影像數據組和3d成像數據組;
8、臨床數據單元,用于記錄患者的病史、體檢數據、實驗室檢查數據;
9、傳感器數據單元,通過可穿戴設備或傳感器獲取患者的生理數據及自我報告數據。
10、更優的,所述相關設備包括ct設備、x光設備,mri設備;
11、所述生理數據包括患者的運動量、關節活動度、步態、運動范圍;所述自我報告數據包括疼痛評分和癥狀變化。
12、較佳的,在所述數據處理模塊中,所述影像數據處理單元使用醫學圖像處理技術,對影像數據進行圖像增強、去噪和配準;
13、具體的,影像數據處理單元將影像數據單元按照日期更替的時間點所組成的時間序列的排列方式第一次獲取的影像數據配置為基準影像數據,則影像數據組中除基準影像數據外的影像數據被配置為后續影像數據,影像數據處理單元在對基準影像數據利用醫學圖像處理技術進行處理后,提取其中的關鍵骨骼特征,并根據該關鍵骨骼特征計算該基準影像數據的角度信息;
14、影像數據處理單元利用配準機制計算后續影像數據與基準影像數據之間關鍵骨骼特征的骨骼關鍵點坐標的角度偏差,并通過測量配準后后續影像數據相較于基準影像數據的旋轉、平移等變換參數,得出后續影像數據與基準影像數據的角度差異。
15、進一步的,所述影像數據處理單元內部還預設匹配角度閾值,用于過濾掉角度差異較大的后續影像數據,其中,所述影像數據處理單元將后續影像數據與基準影像數據進行角度匹配后,當其角度差異小于設定的匹配角度閾值時,被認為是符合條件的影像數據,并將符合條件的后續影像數據沿時間序列進行排列與展示。
16、更進一步的,所述影像數據處理單元內部還預設關聯角度閾值,用于判定角度差異雖然不與匹配角度閾值相匹配,但仍然與目標影像數據具有相似性的后續影像數據,其中,目標影像數據包括基準影像數據、或與基準影像數據相鄰日期時間點的后續影像數據;
17、所述影像數據處理單元將后續影像數據與基準影像數據進行角度匹配后,當后續影像數據的角度差異超過匹配角度閾值時,若一組影像數據與對應時間序列中的某一影像數據存在相似性,且符合關聯角度閾值要求,則該影像數據被分配到對應的時間序列中的時間點,并在該時間點建立可展開的副本,用于收納匹配對應于關聯角度閾值的影像數據;
18、相似性的判斷通過以下公式獲得:
19、
20、式中,i,j表示兩幅待比較的影像數據;μi,μj分別是影像i和j的平均亮度,且σj分別是影像i和j的亮度方差,代表影像的對比信息,且σij為影像i和j的協方差,用于衡量兩幅影像之間的結構相似度,且c1、c2為常數,用于穩定計算,避免分母為零;θ為當前影像數據與基準影像數據之間的角度差異;θm為匹配角度閾值,θa為關聯角度閾值,α為控制角度偏差與相似度影響強度的常數;
21、當θ≤θm時,兩幅影像數據的結構相似度僅由其內容決定,與角度無關;
22、當θm<θ<θa時,結構相似度會逐漸受到角度差異的影響,影像的相似度值會逐漸減小,反映出角度偏差的影響;
23、當θ大于θa時,相似度設為0,表示角度差異過大,影像數據不再滿足匹配或關聯條件。
24、優選的,在所述數據處理模塊中,所述建模單元將數據采集模塊所采集的3d成像數據組轉換為患者軀干對應的三維解剖模型,并且建模單元將經影像數據處理單元處理后的影像數據組中,以時間序列排列的最后時間點所對應的影像數據與三維解剖模型進行對接,將影像數據映射到三維解剖模型,獲得術前模型。
25、優選的,在所述數據處理模塊中,所述數據監測單元通過將時間序列中的各個影像數據按時間進行排列,并對患者的受傷部位進行檢測、與大數據進行匹配,獲取恢復數據。
26、進一步的,所述數據監測單元的工作方法,包括以下步驟:
27、s1、將經影像數據處理單元處理后的影像數據按時間進行排列,對受傷部位的區域特征進行提取,并計算各個時間點中影像數據的變化幅度;
28、s2、根據各時間點的特征提取數據,繪制動態恢復曲線,顯示恢復進度;
29、s3、基于患者受傷部位的區域特征,提取識別信息,并采用相似性匹配算法與骨科大數據庫中的相似病例進行匹配;
30、s4、根據匹配的相似病例,從骨科大數據庫中提取對應的恢復數據基準;
31、s5、將患者的實際恢復曲線與大數據的恢復基準進行對比,計算恢復偏差并獲取恢復數據;
32、s6、基于對比結果,生成個性化恢復方案。
33、本發明還提供一種骨科影像數據分析方法,采用權利要求1-9任意一項所述的一種骨科影像數據分析平臺,該方法包括以下步驟:
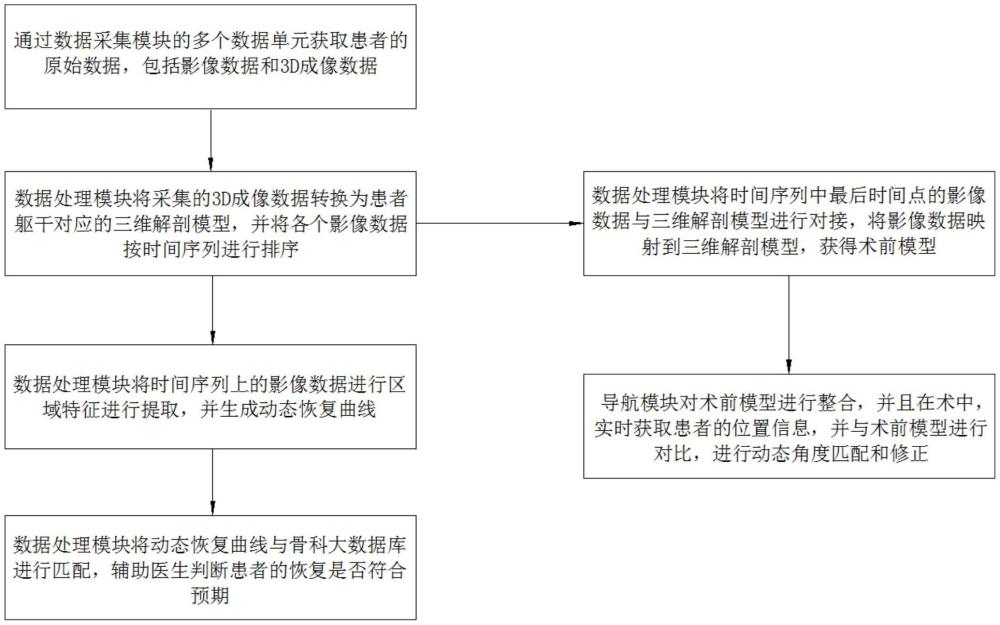
34、步驟一:通過數據采集模塊的多個數據單元獲取患者的原始數據,包括影像數據和3d成像數據;
35、步驟二:數據處理模塊將采集的3d成像數據轉換為患者軀干對應的三維解剖模型,并將各個影像數據按時間序列進行排序;
36、步驟三:數據處理模塊將時間序列上的影像數據進行區域特征進行提取,并生成動態恢復曲線;
37、并且數據處理模塊將動態恢復曲線與骨科大數據庫進行匹配,輔助醫生判斷患者的恢復是否符合預期;
38、步驟四:在手術時,數據處理模塊將時間序列中最后時間點的影像數據與三維解剖模型進行對接,將影像數據映射到三維解剖模型,獲得術前模型;
39、同時,導航模塊對術前模型進行整合,并且在術中,實時獲取患者的位置信息,并與術前模型進行對比,進行動態角度匹配和修正。
40、本發明的有益效果在于:
41、本發明中的導航模塊利用術前模型和實時影像數據進行角度匹配和動態修正,幫助醫生在手術過程中實時監控患者的受傷位置和解剖結構變化,可以提高手術的精度,降低了誤操作的風險;并且通過數據采集模塊的影像數據、臨床數據和傳感器數據的融合,方案可以綜合患者的病史、體檢、運動狀態等信息,提供全方位的恢復狀態評估,可以更好的反映患者的健康狀況。
42、本發明中的時間序列動態恢復曲線展示了受傷部位的恢復進度,量化了骨密度、骨折愈合、軟組織修復、臨床健康評分和運動評分等多種恢復指標,動態恢復曲線不僅可以直觀展示恢復進展,還能與大數據基準對比,幫助醫生及時了解患者的恢復情況。
- 還沒有人留言評論。精彩留言會獲得點贊!