超聲探頭定位方法、裝置、電子設備和計算機可讀介質與流程
本公開的實施例涉及計算機,具體涉及超聲探頭定位方法、裝置、電子設備和計算機可讀介質。
背景技術:
1、目前,隨著科學技術的快速發展,醫療設備對用戶身體的檢測越來越普遍和成熟,如何提高醫療設備對用戶身體檢測的準確性成為人們越來越關注的問題。對于超聲探頭的定位,通常采用的方式為:對超聲探頭采集的超聲圖像進行特征點提取,得到超聲圖像特征點集。然后,通過超聲圖像特征點集和超聲探頭所在的三維空間進行校準定位。
2、然而,實踐中發現,當采用上述方式對運超聲探頭進行定位時,經常會存在如下技術問題一:由于僅通過采集的超聲圖像進行超聲探頭的校準定位,考慮的定位因素過于單一,以及通過超聲圖像的探頭定位存在大量的坐標系轉換運算,定位過程較為繁瑣,導致超聲探頭的定位準確率較低,進而降低通過超聲探頭采集的超聲圖像的質量,超聲圖像中存在大量無用信息。
3、該背景技術部分中所公開的以上信息僅用于增強對本公開構思的背景的理解,并因此,其可包含并不形成本國的本領域普通技術人員已知的現有技術的信息。
技術實現思路
1、本公開的內容部分用于以簡要的形式介紹構思,這些構思將在后面的具體實施方式部分被詳細描述。本公開的內容部分并不旨在標識要求保護的技術方案的關鍵特征或必要特征,也不旨在用于限制所要求的保護的技術方案的范圍。
2、本公開的一些實施例提出了超聲探頭定位方法、裝置、電子設備和計算機可讀介質,來解決以上背景技術部分提到的技術問題中的一項或多項。
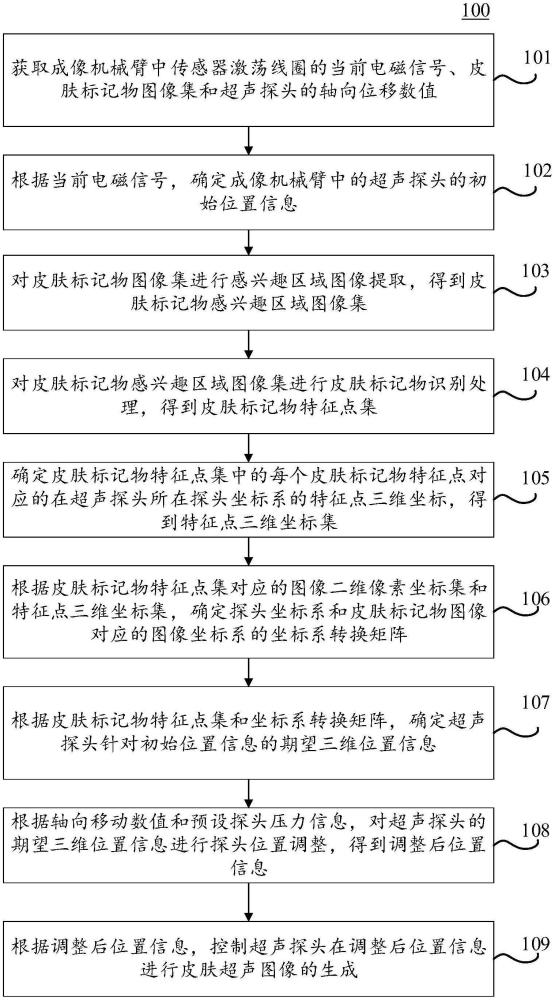
3、第一方面,本公開的一些實施例提供了一種超聲探頭定位方法,包括:獲取醫療成像機械臂中傳感器激蕩線圈的當前電磁信號、皮膚標記物圖像集和超聲探頭的軸向位移數值;根據上述當前電磁信號,確定上述醫療成像機械臂中的超聲探頭的初始位置信息;對上述皮膚標記物圖像集進行感興趣區域圖像提取,得到皮膚標記物感興趣區域圖像集;對上述皮膚標記物感興趣區域圖像集進行皮膚標記物識別處理,得到皮膚標記物特征點集;確定上述皮膚標記物特征點集中的每個皮膚標記物特征點對應的在上述超聲探頭所在探頭坐標系的特征點三維坐標,得到特征點三維坐標集;根據上述皮膚標記物特征點集對應的圖像二維像素坐標集和上述特征點三維坐標集,確定上述探頭坐標系和上述皮膚標記物圖像對應的圖像坐標系的坐標系轉換矩陣;根據上述皮膚標記物特征點集和上述坐標系轉換矩陣,確定上述超聲探頭針對上述初始位置信息的期望三維位置信息;根據上述軸向位移數值和預設探頭壓力信息,對上述超聲探頭的期望三維位置信息進行探頭位置調整,得到調整后位置信息;根據上述調整后位置信息,控制上述超聲探頭在上述調整后位置信息進行皮膚超聲圖像的生成。
4、第二方面,本公開的一些實施例提供了一種超聲探頭定位裝置,包括:獲取單元,被配置成獲取醫療成像機械臂中傳感器激蕩線圈的當前電磁信號、皮膚標記物圖像集和超聲探頭的軸向位移數值;第一確定單元,被配置成根據上述當前電磁信號,確定上述醫療成像機械臂中的超聲探頭的初始位置信息;感興趣區域圖像提取單元,被配置成對上述皮膚標記物圖像集進行感興趣區域圖像提取,得到皮膚標記物感興趣區域圖像集;皮膚標記物識別單元,被配置成對上述皮膚標記物感興趣區域圖像集進行皮膚標記物識別處理,得到皮膚標記物特征點集;第二確定單元,被配置成確定上述皮膚標記物特征點集中的每個皮膚標記物特征點對應的在上述超聲探頭所在探頭坐標系的特征點三維坐標,得到特征點三維坐標集;第三確定單元,被配置成根據上述皮膚標記物特征點集對應的圖像二維像素坐標集和上述特征點三維坐標集,確定上述探頭坐標系和上述皮膚標記物圖像對應的圖像坐標系的坐標系轉換矩陣;第四確定單元,被配置成根據上述皮膚標記物特征點集和上述坐標系轉換矩陣,確定上述超聲探頭針對上述初始位置信息的期望三維位置信息;探頭位置調整單元,被配置成根據上述軸向位移數值和預設探頭壓力信息,對上述超聲探頭的期望三維位置信息進行探頭位置調整,得到調整后位置信息;控制單元,被配置成根據上述調整后位置信息,控制上述超聲探頭在上述調整后位置信息進行皮膚超聲圖像的生成。
5、第三方面,本公開的一些實施例提供了一種電子設備,包括:一個或多個處理器;存儲裝置,其上存儲有一個或多個程序,當一個或多個程序被一個或多個處理器執行,使得一個或多個處理器實現如第一方面中任一實現方式描述的方法。
6、第四方面,本公開的一些實施例提供了一種計算機可讀介質,其上存儲有計算機程序,其中,計算機程序被處理器執行時實現如第一方面中任一實現方式描述的方法。
7、本公開的上述各個實施例中具有如下有益效果:本公開的一些實施例的超聲探頭定位方法通過基于皮膚標記物圖像的視覺超聲探頭和軸向位移數值的力學的超聲探頭定位,可以提高超聲探頭定位的準確性,進而提高生成的超聲探頭的質量。具體來說,造成相關的超聲探頭的定位準確率較低,進而降低通過超聲探頭采集的超聲圖像的質量,超聲圖像中存在大量無用信息的原因在于:由于僅通過采集的超聲圖像進行超聲探頭的校準定位,考慮的定位因素過于單一,以及通過超聲圖像的探頭定位存在大量的坐標系轉換運算,定位過程較為繁瑣,導致超聲探頭的定位準確率較低,進而降低通過超聲探頭采集的超聲圖像的質量,超聲圖像中存在大量無用信息。基于此,本公開的一些實施例的超聲探頭定位方法可以首先,獲取醫療成像機械臂中傳感器激蕩線圈的當前電磁信號、皮膚標記物圖像集和超聲探頭的軸向位移數值。在這里,當前電磁信號便于后續確定超聲探頭的初始位置信息,皮膚標記物圖像集和軸向位移數值便于后續進行基于視覺和力學的超聲探頭的定位。其次,根據上述當前電磁信號,確定上述醫療成像機械臂中的超聲探頭的初始位置信息。在這里,確定超聲探頭的初始位置信息,可以縮短超聲探頭定位的范圍。再次,對上述皮膚標記物圖像集進行感興趣區域圖像提取,得到皮膚標記物感興趣區域圖像集。在這里,可以進一步縮小皮膚標記物的識別范圍,便于后續提高識別效率。接著,對上述皮膚標記物感興趣區域圖像集進行皮膚標記物識別處理,得到皮膚標記物特征點集。在這里,可以提高皮膚標記物識別效率和準確性。隨后,確定上述皮膚標記物特征點集中的每個皮膚標記物特征點對應的在上述超聲探頭所在探頭坐標系的特征點三維坐標,得到特征點三維坐標集。在這里,特征點三維坐標集便于后續確定超聲圖像和皮膚標記物圖像的坐標系的轉換矩陣。之后,根據上述皮膚標記物特征點集對應的圖像二維像素坐標集和上述特征點三維坐標集,確定上述探頭坐標系和上述皮膚標記物圖像對應的圖像坐標系的坐標系轉換矩陣。在這里,得到的坐標系轉換矩陣便于后續將圖像二維坐標轉換為三維坐標,提高基于圖像的視覺超聲定位的準確性。然后,根據上述皮膚標記物特征點集和上述坐標系轉換矩陣,確定上述超聲探頭針對上述初始位置信息的期望三維位置信息。在這里,可以提高期望三維位置信息的準確性。再然后,根據上述軸向位移數值和預設探頭壓力信息,對上述超聲探頭的期望三維位置信息進行探頭位置調整,得到調整后位置信息。在這里,通過力學角度對超聲探頭進行基于圖像的視覺超聲探頭定位的探頭定位調整,可以進一步提高超聲探頭定位的準確性,以及減少和調整后位置信息對應的皮膚的距離,提高超聲探頭接收的超聲探頭的信號損失。最后,根據上述調整后位置信息,控制上述超聲探頭在上述調整后位置信息進行皮膚超聲圖像的生成。在這里,可以提高超聲探頭生成的皮膚超聲圖像的質量。由此可得,該超聲探頭定位通過基于皮膚標記物圖像的視覺超聲探頭和軸向位移數值的力學的超聲探頭定位,可以提高超聲探頭定位的準確性,進而提高生成的超聲探頭的質量。
- 還沒有人留言評論。精彩留言會獲得點贊!