一種三關(guān)節(jié)假手指機(jī)構(gòu)的制作方法
本技術(shù)涉及機(jī)械仿生手,具體為一種三關(guān)節(jié)假手指機(jī)構(gòu)。
背景技術(shù):
1、假肢就是用工程技術(shù)的手段和方法,為彌補(bǔ)截肢者或肢體不完全缺損的肢體而專(zhuān)門(mén)設(shè)計(jì)和制作裝配的人工假體,又稱(chēng)“義肢”。它的主要作用是代替失去肢體的部分功能,使截肢者恢復(fù)一定的生活自理和工作能力。
2、現(xiàn)有技術(shù)中,傳統(tǒng)手爪形式的假手其手指只有一個(gè)自由度,只能適應(yīng)規(guī)則物體的外形,同時(shí)抓取物體時(shí)手指與物體間的接觸面較小。
3、但是,只有一個(gè)自由度的假手指,靈活性較低,對(duì)于不規(guī)則物體的抓取不穩(wěn)定,容易使物體在抓取過(guò)程中滑落,同時(shí)由于手指與物體的接觸面積較小,手爪的夾持力主要集中在較小的面積上,容易造成物體的損壞/變形。
技術(shù)實(shí)現(xiàn)思路
1、本實(shí)用新型的目的在于提供一種三關(guān)節(jié)假手指機(jī)構(gòu),以解決上述背景技術(shù)中提出的問(wèn)題。
2、為實(shí)現(xiàn)上述目的,本實(shí)用新型提供如下技術(shù)方案:
3、第一關(guān)節(jié)座,第一關(guān)節(jié)座上側(cè)安裝有小齒輪,小齒輪一側(cè)嚙合有大齒輪,
4、大齒輪上側(cè)設(shè)置有連接軸,連接軸一側(cè)設(shè)置有第二關(guān)節(jié)座。
5、第二關(guān)節(jié)座底部設(shè)置有第一半齒,第一半齒一側(cè)嚙合有第二半齒,第二半齒一側(cè)設(shè)置有蝸桿,蝸桿一側(cè)嚙合有蝸輪,蝸輪一側(cè)安裝有指節(jié)。
6、優(yōu)選的,第一關(guān)節(jié)座上表面固定安裝有罩殼,罩殼內(nèi)側(cè)壁固定安裝有微型電機(jī)一,微型電機(jī)一的輸出端固定套設(shè)有小齒輪,小齒輪一側(cè)設(shè)置有控制器,
7、控制器與第一關(guān)節(jié)座之間固定連接。
8、優(yōu)選的,大齒輪套設(shè)在固定軸內(nèi)且與固定軸之間轉(zhuǎn)動(dòng)連接,固定軸下表面與第一關(guān)節(jié)座之間固定連接,固定軸一側(cè)設(shè)置有第一軸承座。
9、優(yōu)選的,連接軸一端固定套設(shè)在第一軸承座內(nèi),連接軸另外一端固定套設(shè)在第二軸承座內(nèi),第二軸承座兩側(cè)與第二關(guān)節(jié)座之間固定連接,第一軸承座與大齒輪之間固定連接。
10、優(yōu)選的,第一半齒固定套設(shè)在套軸上,套軸固定套設(shè)在第二關(guān)節(jié)座內(nèi),第一半齒與第二半齒輪之間嚙合傳動(dòng),第一半齒上表面固定安裝有微型電機(jī)二。
11、優(yōu)選的,微型電機(jī)二的輸出端固定套設(shè)有轉(zhuǎn)桿,轉(zhuǎn)桿一端固定套設(shè)有從動(dòng)軸,第二半齒固定套設(shè)在從動(dòng)軸上,第二半齒與轉(zhuǎn)桿之間安裝有第三關(guān)節(jié)座。
12、優(yōu)選的,第三關(guān)節(jié)座固定套設(shè)在從動(dòng)軸上,第二關(guān)節(jié)座與第三關(guān)節(jié)座之間固定連接有硅膠墊,硅膠墊一側(cè)固定安裝有電阻式薄膜力傳感器,第三關(guān)節(jié)座內(nèi)固定套設(shè)有微型電機(jī)三,微型電機(jī)三的輸出軸與蝸桿固定連接。
13、優(yōu)選的,微型電機(jī)三一側(cè)固定安裝有支架,支架內(nèi)固定套設(shè)有橫軸,蝸輪套設(shè)在橫軸上且與橫軸之間轉(zhuǎn)動(dòng)連接,指節(jié)一端的兩側(cè)與蝸輪側(cè)面之間固定連接。
14、與現(xiàn)有技術(shù)相比,本實(shí)用新型的有益效果是:
15、1.通過(guò)控制器控制微型電機(jī)一轉(zhuǎn)動(dòng),微型電機(jī)一從而帶動(dòng)小齒輪轉(zhuǎn)動(dòng),小齒輪與轉(zhuǎn)動(dòng)套設(shè)在固定軸上的大齒輪嚙合傳動(dòng),從而使大齒輪帶動(dòng)其上側(cè)固定安裝的第一軸承座轉(zhuǎn)動(dòng),第一軸承座通過(guò)連接軸帶動(dòng)第二軸承座轉(zhuǎn)動(dòng),從而增加了整個(gè)裝置的靈活性,保證了假手靈巧操作控制的需求。
16、2.通過(guò)控制器控制微型電機(jī)二轉(zhuǎn)動(dòng),微型電機(jī)二通過(guò)其輸出軸帶動(dòng)轉(zhuǎn)桿的一端轉(zhuǎn)動(dòng),從而使轉(zhuǎn)桿通過(guò)從動(dòng)軸帶動(dòng)第二半齒轉(zhuǎn)動(dòng),第二半齒與第一半齒之間嚙合傳動(dòng),從而帶動(dòng)第三關(guān)節(jié)座轉(zhuǎn)動(dòng),進(jìn)而對(duì)第三關(guān)節(jié)座的轉(zhuǎn)動(dòng)角度進(jìn)行調(diào)節(jié),再通過(guò)控制器控制微型電機(jī)三帶動(dòng)其一端安裝的蝸桿轉(zhuǎn)動(dòng),蝸桿與蝸輪之間嚙合傳動(dòng),從而使蝸輪在橫軸上轉(zhuǎn)動(dòng),進(jìn)而使蝸輪帶動(dòng)指節(jié)轉(zhuǎn)動(dòng),進(jìn)一步增加指節(jié)的靈活性,從而更好的對(duì)物體進(jìn)行抓取,設(shè)置硅膠墊提高手指與物體間的接觸面積,增加抓取的穩(wěn)定性,抓取物體時(shí),首先給電阻式薄膜力傳感器設(shè)定一個(gè)初始值,當(dāng)電阻式薄膜力傳感器表面接觸物體后,其表面的壓力值一直增大,直到增大到設(shè)定值后,由電阻式薄膜力傳感器反饋給控制器,此時(shí)控制器接收到信號(hào)后,控制所有電機(jī)停止轉(zhuǎn)動(dòng),物體被抓緊,進(jìn)一步提高抓取的穩(wěn)定性與靈活性。
技術(shù)特征:
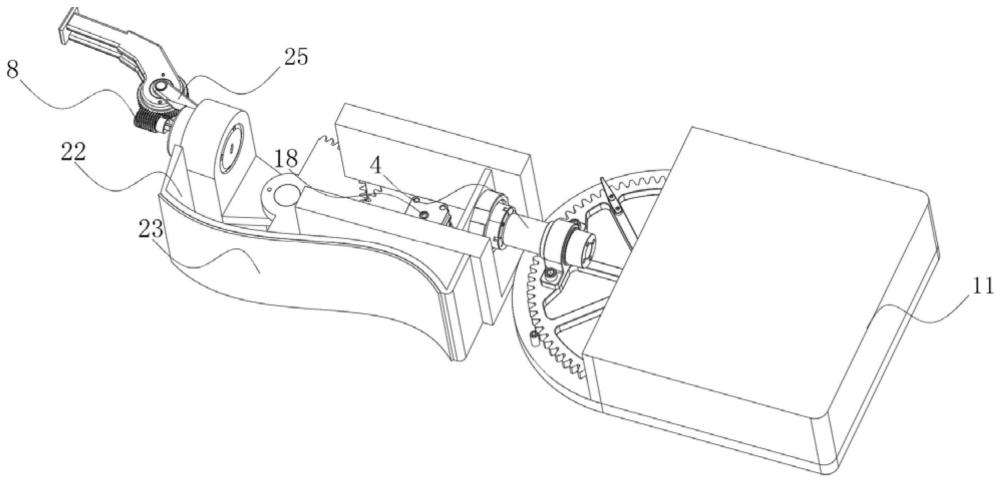
1.一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述三關(guān)節(jié)假手指機(jī)構(gòu)包括:第一關(guān)節(jié)座(1),第一關(guān)節(jié)座(1)上側(cè)安裝有小齒輪(2),小齒輪(2)一側(cè)嚙合有大齒輪(3),大齒輪(3)上側(cè)設(shè)置有連接軸(4),連接軸(4)一側(cè)設(shè)置有第二關(guān)節(jié)座(5);
2.根據(jù)權(quán)利要求1所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述第一關(guān)節(jié)座(1)上表面固定安裝有罩殼(11),罩殼(11)內(nèi)側(cè)壁固定安裝有微型電機(jī)一(12),微型電機(jī)一(12)的輸出端固定套設(shè)有小齒輪(2),小齒輪(2)一側(cè)設(shè)置有控制器(13),控制器(13)與第一關(guān)節(jié)座(1)之間固定連接。
3.根據(jù)權(quán)利要求2所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述大齒輪(3)套設(shè)在固定軸(14)內(nèi)且與固定軸(14)之間轉(zhuǎn)動(dòng)連接,固定軸(14)下表面與第一關(guān)節(jié)座(1)之間固定連接,固定軸(14)一側(cè)設(shè)置有第一軸承座(15)。
4.根據(jù)權(quán)利要求3所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述連接軸(4)一端固定套設(shè)在第一軸承座(15)內(nèi),連接軸(4)另外一端固定套設(shè)在第二軸承座(16)內(nèi),第二軸承座(16)兩側(cè)與第二關(guān)節(jié)座(5)之間固定連接,第一軸承座(15)與大齒輪(3)之間固定連接。
5.根據(jù)權(quán)利要求4所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述第一半齒(6)固定套設(shè)在套軸(17)上,套軸(17)固定套設(shè)在第二關(guān)節(jié)座(5)內(nèi),第一半齒(6)與第二半齒(7)之間嚙合傳動(dòng),第一半齒(6)上表面固定安裝有微型電機(jī)二(18)。
6.根據(jù)權(quán)利要求5所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述微型電機(jī)二(18)的輸出端固定套設(shè)有轉(zhuǎn)桿(19),轉(zhuǎn)桿(19)一端固定套設(shè)有從動(dòng)軸(20),第二半齒(7)固定套設(shè)在從動(dòng)軸(20)上,第二半齒(7)與轉(zhuǎn)桿(19)之間安裝有第三關(guān)節(jié)座(21)。
7.根據(jù)權(quán)利要求6所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述第三關(guān)節(jié)座(21)固定套設(shè)在從動(dòng)軸(20)上,第二關(guān)節(jié)座(5)與第三關(guān)節(jié)座(21)之間固定連接有硅膠墊(22),硅膠墊(22)一側(cè)固定安裝有電阻式薄膜力傳感器(23),第三關(guān)節(jié)座(21)內(nèi)固定套設(shè)有微型電機(jī)三(24),微型電機(jī)三(24)的輸出軸與蝸桿(8)固定連接。
8.根據(jù)權(quán)利要求7所述的一種三關(guān)節(jié)假手指機(jī)構(gòu),其特征在于:所述微型電機(jī)三(24)一側(cè)固定安裝有支架(25),支架(25)內(nèi)固定套設(shè)有橫軸(26),蝸輪(9)套設(shè)在橫軸(26)上且與橫軸(26)之間轉(zhuǎn)動(dòng)連接,指節(jié)(10)一端的兩側(cè)與蝸輪(9)側(cè)面之間固定連接。
技術(shù)總結(jié)
本技術(shù)涉及機(jī)械仿生手技術(shù)領(lǐng)域,具體為一種三關(guān)節(jié)假手指機(jī)構(gòu),有益效果為:第一關(guān)節(jié)座,第一關(guān)節(jié)座上側(cè)安裝有小齒輪,小齒輪一側(cè)嚙合有大齒輪,大齒輪上側(cè)設(shè)置有連接軸,連接軸一側(cè)設(shè)置有第二關(guān)節(jié)座,第二關(guān)節(jié)座底部設(shè)置有第一半齒,第一半齒一側(cè)嚙合有第二半齒,第二半齒一側(cè)設(shè)置有蝸桿,蝸桿一側(cè)嚙合有蝸輪,蝸輪一側(cè)安裝有指節(jié)。有益效果:通過(guò)小齒輪與大齒輪之間嚙合傳動(dòng),從而間接帶動(dòng)連接軸移動(dòng),連接軸從而帶動(dòng)第二關(guān)節(jié)座轉(zhuǎn)動(dòng),從而對(duì)第二關(guān)節(jié)座的轉(zhuǎn)動(dòng)角度進(jìn)行調(diào)節(jié),再通過(guò)第一半齒與第二半齒之間嚙合傳動(dòng),從而對(duì)指節(jié)的轉(zhuǎn)動(dòng)角度進(jìn)行調(diào)節(jié),蝸桿與蝸輪的嚙合傳動(dòng),進(jìn)而對(duì)指節(jié)的彎曲角度進(jìn)行調(diào)節(jié),以此更好適應(yīng)不同被抓取對(duì)象的外形。
技術(shù)研發(fā)人員:鄧星,龔小明,劉繼春
受保護(hù)的技術(shù)使用者:成都市碩博義肢科技開(kāi)發(fā)有限公司
技術(shù)研發(fā)日:20240314
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!