基于毫米波雷達(dá)的人體心率檢測(cè)裝置及方法與流程
本發(fā)明涉及人體心率檢測(cè)領(lǐng)域,尤其是涉及基于毫米波雷達(dá)的人體心率檢測(cè)裝置及方法。
背景技術(shù):
1、目前,人體心率檢測(cè)技術(shù)主要包括以下幾種:
2、1)光電容積脈搏圖(ppg)技術(shù):通過檢測(cè)皮膚表面血液容積變化來獲取心率信息,廣泛應(yīng)用于智能手環(huán)、手表等可穿戴設(shè)備。
3、2)心電圖(ecg)技術(shù):通過電極片貼在皮膚上,檢測(cè)心臟電活動(dòng)來獲取心率信息,主要用于醫(yī)療領(lǐng)域。
4、3)胸部帶式心率監(jiān)測(cè)技術(shù):通過胸部帶式傳感器,檢測(cè)胸部運(yùn)動(dòng)和心跳信號(hào),適用于運(yùn)動(dòng)場(chǎng)景。
5、上述不同技術(shù)路線的缺陷分別為:
6、1)光電容積脈搏圖(ppg)技術(shù)易受皮膚顏色、環(huán)境光線等因素影響,準(zhǔn)確性受限;需緊密貼合皮膚,使用體驗(yàn)不佳。
7、2)心電圖(ecg)技術(shù)需粘貼電極片,使用不便;無法實(shí)現(xiàn)長時(shí)間連續(xù)監(jiān)測(cè)。
8、3)胸部帶式心率監(jiān)測(cè)技術(shù)存在佩戴不適,易受運(yùn)動(dòng)干擾,準(zhǔn)確性較低的缺陷。
9、且上述技術(shù)路線均只能實(shí)現(xiàn)近距離一對(duì)一的心率監(jiān)測(cè),對(duì)于指定場(chǎng)景下區(qū)域范圍內(nèi)的多個(gè)人體心率監(jiān)測(cè)無法實(shí)現(xiàn)。
技術(shù)實(shí)現(xiàn)思路
1、為了解決上述技術(shù)問題,本發(fā)明提供基于毫米波雷達(dá)的人體心率檢測(cè)裝置及方法。采用如下的技術(shù)方案:
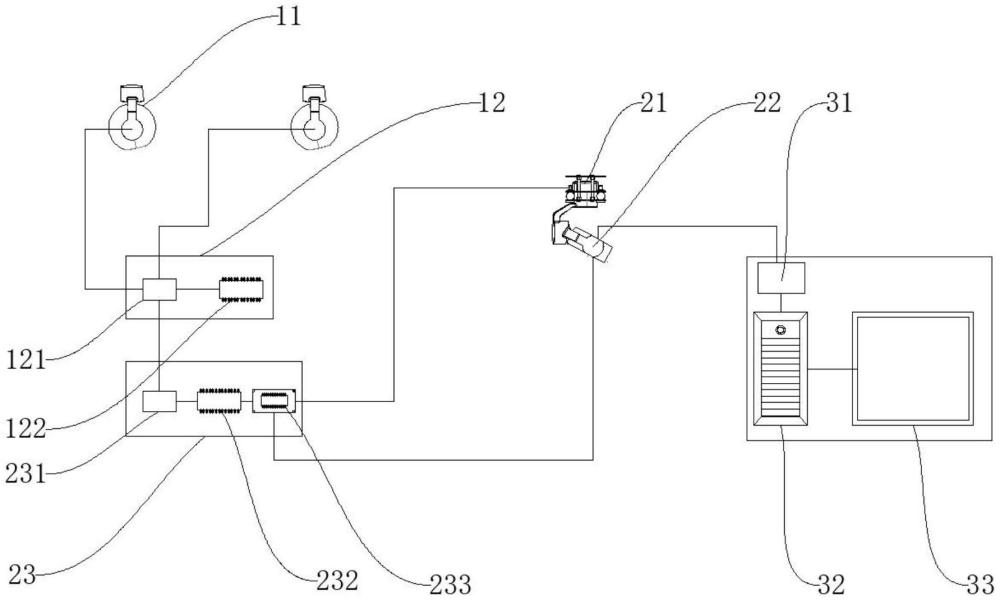
2、基于毫米波雷達(dá)的人體心率檢測(cè)裝置,其特征在于:包括視覺檢測(cè)單元、毫米波雷達(dá)檢測(cè)單元和心率分析模塊,所述視覺檢測(cè)單元包括多個(gè)攝像頭和視覺分析模塊,多個(gè)攝像頭拍攝目標(biāo)范圍內(nèi)視覺畫面,所述視覺分析模塊分別與多個(gè)攝像頭通信連接,交互目標(biāo)范圍內(nèi)視覺畫面,并基于人體運(yùn)動(dòng)追蹤算法得到多個(gè)人體特征位置和運(yùn)動(dòng)數(shù)據(jù),基于運(yùn)動(dòng)數(shù)據(jù)判斷對(duì)應(yīng)人體在設(shè)定時(shí)間內(nèi)運(yùn)動(dòng)量低于設(shè)定值時(shí),判斷對(duì)應(yīng)人體處于靜止?fàn)顟B(tài),得到靜止?fàn)顟B(tài)的人體位置數(shù)據(jù);
3、毫米波雷達(dá)檢測(cè)單元包括角度調(diào)整機(jī)構(gòu)、毫米波雷達(dá)和基于芯片的雷達(dá)控制器,角度調(diào)整機(jī)構(gòu)的底座安裝在攝像頭一側(cè),毫米波雷達(dá)安裝在角度調(diào)整機(jī)構(gòu)的活動(dòng)部上,雷達(dá)控制器與視覺分析模塊通信連接交互靜止?fàn)顟B(tài)的人體位置數(shù)據(jù),并分別控制角度調(diào)整機(jī)構(gòu)和毫米波雷達(dá)的執(zhí)行動(dòng)作,使毫米波雷達(dá)朝向靜止?fàn)顟B(tài)的人體位置并發(fā)射毫米雷達(dá)波,心率分析模塊與毫米波雷達(dá)通信交互,分析得到對(duì)應(yīng)人體的心率數(shù)據(jù)。
4、通過采用上述技術(shù)方案,通過采用毫米波雷達(dá)檢測(cè)單元可以解決遠(yuǎn)距離檢測(cè)人體心率的解決方案,其適用場(chǎng)景一般是病房、監(jiān)所等較為封閉的場(chǎng)所,可以在無接觸設(shè)備狀態(tài)下監(jiān)測(cè)區(qū)域場(chǎng)所內(nèi)的多個(gè)人體心率,為了能實(shí)現(xiàn)較為準(zhǔn)確的監(jiān)測(cè)結(jié)果,需要先通過視覺檢測(cè)單元來確定人體特征位置,并且需要人體相對(duì)靜止?fàn)顟B(tài)才能采用毫米波雷達(dá)定向獲取更加準(zhǔn)確的心率信號(hào),具體的可以基于視覺檢測(cè)單元可以基于人體運(yùn)動(dòng)追蹤算法得到多個(gè)人體特征位置和運(yùn)動(dòng)數(shù)據(jù),人體追蹤算法在視覺監(jiān)控領(lǐng)域?qū)儆谳^為成熟的技術(shù)方案,可以實(shí)現(xiàn)對(duì)人體特征進(jìn)行自動(dòng)化識(shí)別,還可以通過視覺位移算法實(shí)現(xiàn)位移量的計(jì)算,最終基于設(shè)定的靜止?fàn)顟B(tài)判斷標(biāo)準(zhǔn)實(shí)現(xiàn)對(duì)應(yīng)人體特征處于靜止?fàn)顟B(tài),例如可以設(shè)定幾秒內(nèi)位移量低于多少來實(shí)現(xiàn)人體相對(duì)處于靜止?fàn)顟B(tài)的判斷,并通過視覺分析算法可以基于預(yù)先構(gòu)建的當(dāng)前區(qū)域的電子地圖來實(shí)現(xiàn)對(duì)靜止?fàn)顟B(tài)人體位置的確定;
5、最終對(duì)判斷為靜止?fàn)顟B(tài)的人體作為遠(yuǎn)距離心率檢測(cè)的目標(biāo),通過雷達(dá)控制器控制角度調(diào)整機(jī)構(gòu)的動(dòng)作可以實(shí)現(xiàn)將毫米波雷達(dá)對(duì)準(zhǔn)人體心臟位置,可以實(shí)現(xiàn)基于毫米波對(duì)于胸部由于心跳的起伏進(jìn)行檢測(cè),基于并最終通過分析得到對(duì)應(yīng)人體的心率數(shù)據(jù);
6、實(shí)現(xiàn)了在目標(biāo)區(qū)域范圍內(nèi)的遠(yuǎn)距離心率監(jiān)測(cè),可以對(duì)目標(biāo)區(qū)域內(nèi)的多個(gè)人體目標(biāo)檢測(cè)心率。
7、可選的,視覺分析模塊包括存儲(chǔ)器和視覺分析芯片,所述存儲(chǔ)器分別與多個(gè)攝像頭通信連接,所述視覺分析芯片與存儲(chǔ)器通信連接交互,視覺分析芯片基于人體運(yùn)動(dòng)追蹤算法得到多個(gè)人體特征位置和運(yùn)動(dòng)數(shù)據(jù),并判斷是否存在人體特征處于靜止?fàn)顟B(tài),將判斷處于靜止?fàn)顟B(tài)的人體特征位置數(shù)據(jù)存儲(chǔ)在存儲(chǔ)器。
8、通過采用上述技術(shù)方案,視覺分析模塊的實(shí)現(xiàn)形式可以是存儲(chǔ)器和視覺分析芯片,還可以是具有視覺分析能力的其它智能體,例如視覺分析計(jì)算機(jī)等。
9、可選的,角度調(diào)整機(jī)構(gòu)是電動(dòng)云臺(tái)。
10、通過采用上述技術(shù)方案電動(dòng)云臺(tái)可以實(shí)現(xiàn)雷達(dá)角度的自動(dòng)化調(diào)整,可以精準(zhǔn)的指向目標(biāo)方向,具體應(yīng)用時(shí)還可以配合電動(dòng)直線滑臺(tái)或平面電機(jī)等,將電動(dòng)直線滑臺(tái)或平面電機(jī)安裝在區(qū)域目標(biāo)的房頂,再將角度調(diào)整機(jī)構(gòu)安裝在電動(dòng)直線滑臺(tái)或平面電機(jī)的活動(dòng)部上,可以增加角度調(diào)整機(jī)構(gòu)上安裝的毫米波雷達(dá)覆蓋范圍,避免角度原因雷達(dá)干擾。
11、可選的,雷達(dá)控制器包括緩存器、指令生成芯片和控制芯片,所述緩存器與存儲(chǔ)器通信交互靜止?fàn)顟B(tài)的人體特征位置數(shù)據(jù),指令生成芯片與緩存器通信連接,基于人體特征位置數(shù)據(jù)分別生成用于控制角度調(diào)整機(jī)構(gòu)和毫米波雷達(dá)的控制指令,所述控制芯片與緩存器通過連接,基于控制指令分別控制角度調(diào)整機(jī)構(gòu)和毫米波雷達(dá)的執(zhí)行動(dòng)作。
12、通過采用上述技術(shù)方案,指令生成芯片可以根據(jù)人體特征位置數(shù)據(jù)分別生成用于控制角度調(diào)整機(jī)構(gòu)和毫米波雷達(dá)的控制指令,再通過控制芯片控制角度調(diào)整機(jī)構(gòu)動(dòng)作,實(shí)現(xiàn)毫米波雷達(dá)對(duì)準(zhǔn)目標(biāo)人體指定位置,并控制毫米波雷達(dá)發(fā)射毫米波,并接收反射的毫米波信號(hào),實(shí)現(xiàn)微量位移的檢測(cè),從而實(shí)現(xiàn)所需要檢測(cè)的心率相關(guān)信號(hào)數(shù)據(jù)。
13、可選的,心率分析模塊包括雷達(dá)數(shù)據(jù)存儲(chǔ)器和雷達(dá)數(shù)據(jù)分析計(jì)算機(jī),所述雷達(dá)數(shù)據(jù)存儲(chǔ)器與毫米波雷達(dá)通信交互雷達(dá)數(shù)據(jù),所述雷達(dá)數(shù)據(jù)分析計(jì)算機(jī)基于多普勒效應(yīng)檢測(cè)分析人體胸部的微小規(guī)律運(yùn)動(dòng),通過頻譜分析方法從微多普勒信號(hào)中分析得到心率信息。
14、通過采用上述技術(shù)方案,心率分析模塊基于雷達(dá)數(shù)據(jù)分析計(jì)算機(jī)來實(shí)現(xiàn),雷達(dá)數(shù)據(jù)分析計(jì)算機(jī)是具有一定算力的計(jì)算機(jī),可以高效地實(shí)現(xiàn)對(duì)雷達(dá)數(shù)據(jù)的處理。
15、可選的,心率分析模塊還包括顯示器,顯示器與雷達(dá)數(shù)據(jù)分析計(jì)算機(jī)通信連接,顯示人體輪廓和對(duì)應(yīng)心率數(shù)據(jù)。
16、通過采用上述技術(shù)方案,顯示器可以配合實(shí)現(xiàn)更加豐富的心率數(shù)據(jù)顯示,例如可以通過采集視覺檢測(cè)單的人體特征數(shù)據(jù),再通過常規(guī)的輪廓標(biāo)注后,再將對(duì)應(yīng)心率數(shù)據(jù)標(biāo)注進(jìn)行顯示,使管理人員,例如病房醫(yī)生可以更加便捷地了解區(qū)域范圍內(nèi)多個(gè)人員的心率狀態(tài)。
17、基于毫米波雷達(dá)的人體心率檢測(cè)方法,采用基于毫米波雷達(dá)的人體心率檢測(cè)裝置對(duì)區(qū)域目標(biāo)范圍內(nèi)的多個(gè)人體目標(biāo)檢測(cè)心率,包括以下步驟:
18、步驟1,多個(gè)攝像頭拍攝目標(biāo)范圍內(nèi)視覺畫面,取視覺畫面中人體目標(biāo)完整,且像素最大的視覺畫面作為待分析視覺畫面;
19、步驟2,視覺分析芯片基于人體運(yùn)動(dòng)追蹤算法對(duì)待分析視覺畫面分析得到多個(gè)人體特征位置和運(yùn)動(dòng)數(shù)據(jù),并基于靜止?fàn)顟B(tài)判斷條件判斷人體特征是否處于靜止?fàn)顟B(tài),靜止?fàn)顟B(tài)判斷條件是設(shè)定持續(xù)時(shí)間內(nèi)運(yùn)動(dòng)量低于設(shè)定值;
20、步驟3,當(dāng)判斷存在對(duì)應(yīng)人體特征處于靜止?fàn)顟B(tài)時(shí),基于區(qū)域目標(biāo)的電子地圖標(biāo)識(shí)對(duì)應(yīng)人體特征位置數(shù)據(jù);
21、步驟4,緩存器與存儲(chǔ)器通信交互靜止?fàn)顟B(tài)的人體特征位置數(shù)據(jù),指令生成芯片基于人體特征位置數(shù)據(jù)分別生成用于控制角度調(diào)整機(jī)構(gòu)和毫米波雷達(dá)的控制指令,控制芯片基于控制指令分別控制角度調(diào)整機(jī)構(gòu)和毫米波雷達(dá)的執(zhí)行動(dòng)作,使毫米波雷達(dá)的指向處于靜止?fàn)顟B(tài)人體特征的胸部位置,并開啟毫米波雷達(dá)發(fā)射毫米波;
22、步驟5,雷達(dá)數(shù)據(jù)存儲(chǔ)器存儲(chǔ)毫米波數(shù)據(jù),雷達(dá)數(shù)據(jù)分析計(jì)算機(jī)基于頻譜分析方法計(jì)算得到對(duì)應(yīng)人體的心率數(shù)據(jù);
23、步驟6,顯示器與雷達(dá)數(shù)據(jù)分析計(jì)算機(jī)交互對(duì)應(yīng)人體的心率數(shù)據(jù),并與視覺檢測(cè)單元交互人體特征數(shù)據(jù),基于實(shí)景畫面顯示對(duì)應(yīng)人體的輪廓畫面和心率數(shù)據(jù)。
24、可選的,步驟2中,靜止?fàn)顟B(tài)判斷條件是:在設(shè)定人體特征的幾何中心在五秒內(nèi)的位移量小于十毫米。
25、通過采用上述技術(shù)方案,由于采用多個(gè)攝像頭的方案,因此可能出現(xiàn)多個(gè)攝像頭拍攝的畫面均有完整的人體特征畫面,這時(shí)在選擇待分析視覺畫面時(shí)應(yīng)當(dāng)選擇畫面中人體目標(biāo)完整,且像素最大的視覺畫面作為待分析視覺畫面,可以更好地實(shí)現(xiàn)人體位置追蹤;
26、人體運(yùn)動(dòng)追蹤算法可以實(shí)現(xiàn)對(duì)人體特征的追蹤,具體的人體運(yùn)動(dòng)追蹤算法使用背景減除法、光流法或深度學(xué)習(xí)算法來檢測(cè)和追蹤人體運(yùn)動(dòng)。
27、對(duì)于深度學(xué)習(xí)方法,使用卷積神經(jīng)網(wǎng)絡(luò)(cnn)來識(shí)別人體特征;
28、對(duì)于每個(gè)檢測(cè)到的人體特征,計(jì)算其在連續(xù)幀中的位置變化。
29、如果在5秒內(nèi)的總運(yùn)動(dòng)量低于10mm,則判斷該人體特征處于靜止?fàn)顟B(tài),這時(shí)一般是人體處于相對(duì)靜止?fàn)顟B(tài),可以采用毫米波來實(shí)現(xiàn)對(duì)人體胸部位置的心率信號(hào)進(jìn)行采集。
30、可選的,步驟5中計(jì)算得到對(duì)應(yīng)人體的心率數(shù)據(jù)包括以下子步驟:
31、步驟51,對(duì)雷達(dá)數(shù)據(jù)放大、濾波和下變頻;
32、步驟52,通過分析回波信號(hào)的相位變化或頻率變化來檢測(cè)胸部的微小運(yùn)動(dòng);
33、步驟53,從接收到的微小運(yùn)動(dòng)信號(hào)中分離出與心臟跳動(dòng)關(guān)聯(lián)的運(yùn)動(dòng)信號(hào)作為心率信號(hào);
34、步驟54,通過傅里葉變換提取心率信號(hào)中的頻率成分,公式如下:
35、xf=fx(t);
36、其中xf是信號(hào)x(t)的傅里葉變換,f·表示傅里葉變換操作;
37、步驟55,找到傅里葉變換結(jié)果中的主頻峰值,并轉(zhuǎn)換為心率。
38、可選的,步驟55中,將主頻峰值轉(zhuǎn)換為心率的公式為:
39、
40、其中hr是心率,fpeak是心率信號(hào)中的主頻峰值,fsample是采樣頻率。
41、通過采用上述技術(shù)方案,毫米波雷達(dá)通常選擇在24ghz或77ghz的工業(yè)、科學(xué)和醫(yī)療(ism)頻段,這些頻率對(duì)人體的穿透性較好且不會(huì)造成傷害。還可以設(shè)計(jì)專用的毫米波雷達(dá)接收天線陣列,設(shè)計(jì)合適的天線陣列以聚焦在胸部區(qū)域,提高信噪比,當(dāng)然直接采用毫米波雷達(dá)正對(duì)發(fā)射和接收也是可行的。毫米波雷達(dá)可以無接觸地檢測(cè)人體心率,適用于醫(yī)療監(jiān)測(cè)、健康監(jiān)測(cè)等領(lǐng)域。
42、綜上所述,本發(fā)明包括以下至少一種有益技術(shù)效果:
43、本發(fā)明能提供基于毫米波雷達(dá)的人體心率檢測(cè)裝置及方法,通過采用毫米波雷達(dá)檢測(cè)單元解決遠(yuǎn)距離檢測(cè)人體心率的解決方案,可以在無接觸設(shè)備狀態(tài)下監(jiān)測(cè)區(qū)域場(chǎng)所內(nèi)的多個(gè)人體心率,為了能實(shí)現(xiàn)較為準(zhǔn)確的監(jiān)測(cè)結(jié)果,需要先通過視覺檢測(cè)單元來確定人體特征位置,并且需要人體相對(duì)靜止?fàn)顟B(tài)才能采用毫米波雷達(dá)定向獲取更加準(zhǔn)確的心率信號(hào),并通過視覺分析算法可以基于預(yù)先構(gòu)建的當(dāng)前區(qū)域的電子地圖來實(shí)現(xiàn)對(duì)靜止?fàn)顟B(tài)人體位置的確定;
44、最終對(duì)判斷為靜止?fàn)顟B(tài)的人體作為遠(yuǎn)距離心率檢測(cè)的目標(biāo),通過雷達(dá)控制器控制角度調(diào)整機(jī)構(gòu)的動(dòng)作可以實(shí)現(xiàn)將毫米波雷達(dá)對(duì)準(zhǔn)人體心臟位置,可以實(shí)現(xiàn)基于毫米波對(duì)于胸部由于心跳的起伏進(jìn)行檢測(cè),基于并最終通過分析得到對(duì)應(yīng)人體的心率數(shù)據(jù);
45、實(shí)現(xiàn)了在目標(biāo)區(qū)域范圍內(nèi)的遠(yuǎn)距離心率監(jiān)測(cè),可以對(duì)目標(biāo)區(qū)域內(nèi)的多個(gè)人體目標(biāo)檢測(cè)心率。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!