墻板裝夾機械手和墻板安裝機器人的制作方法
本技術涉及墻板夾持的,尤其涉及一種墻板裝夾機械手。
背景技術:
1、由于住宅建筑的層高及平面尺寸具有通用性和重復性,所以預制墻板是“部品構件產業化和通用化”中的重要一環,是住宅建筑中最可以標準化,最適合采用預制裝配設計和施工的部分,對促進建筑工業化技術的快速推廣具有積極的意義。而關于墻板安裝的便捷性,實現“裝配式建筑”的可行性,有效提高建筑行業的效率和降低人力成本,以機械代替人工,是未來建房繞不開的關鍵環節。墻板安裝機器人則是實現墻板機械化安裝的重點機械。
2、現有技術中,墻板安裝機器人的墻板裝夾機械手在操作過程中需要工人通過肉眼識別機器人的行走和抓取到位的情況,導致時常出現機械手損壞墻板的問題。
技術實現思路
1、(一)要解決的技術問題
2、鑒于現有技術的上述缺點、不足,本實用新型提供一種墻板裝夾機械手,其解決了現有技術中存在的墻板安裝機器人的墻板裝夾機械手在操作過程中需要工人通過肉眼識別機器人的行走和抓取到位的情況,導致時常出現機械手損壞墻板的問題。
3、(二)技術方案
4、為了達到上述目的,本實用新型采用的主要技術方案包括:
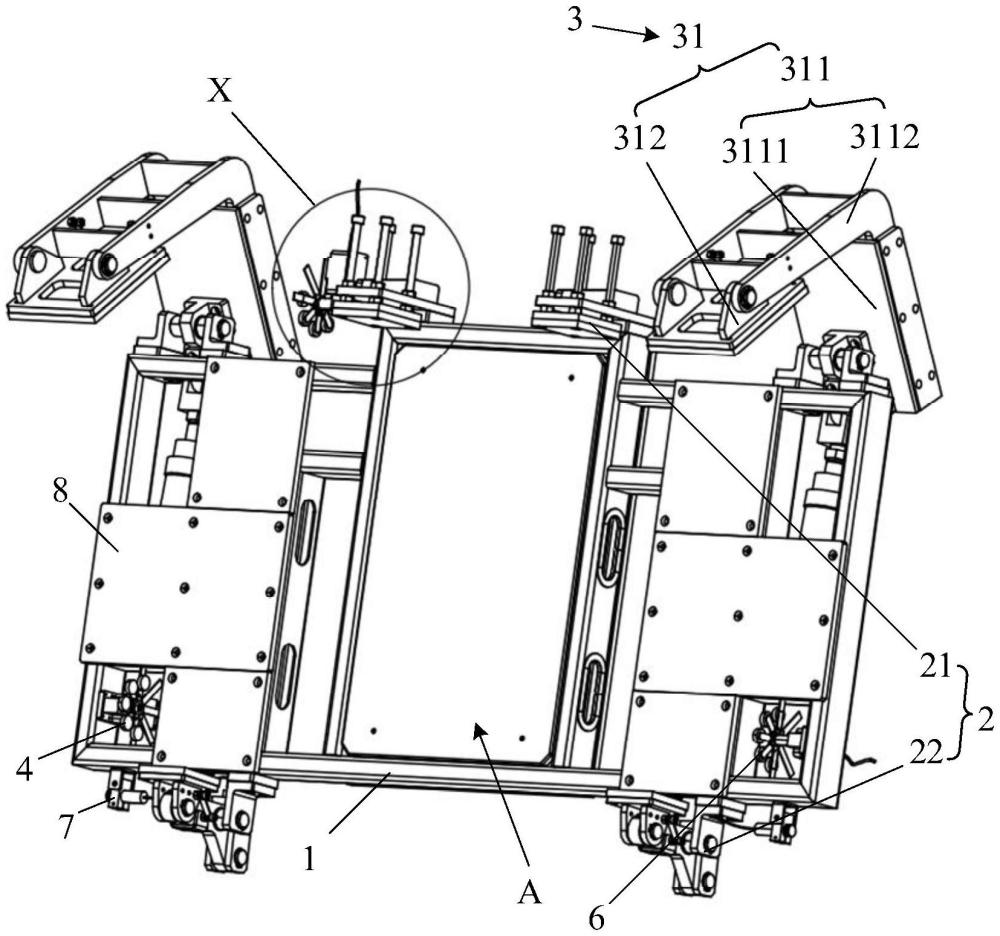
5、第一方面,本實用新型提供一種墻板裝夾機械手,包括基體、連接于基體上的寬度夾單元、厚度夾單元,以及設于基體上的第一傳感器、第二傳感器和第三傳感器,寬度夾單元包括固定連接于基體一側的第一夾持組件;和活動連接于基體另一側的第二夾持組件;寬度夾單元能夠在墻板的寬度方向夾緊墻板,厚度夾單元能夠將墻板壓緊在工作面上;當工作面與墻板間距達到閾值時,第一傳感器被觸發;當第一夾持組件的夾持面接觸墻板時,第二傳感器被觸發;當厚度夾單元夾緊墻板時,第三傳感器被觸發。
6、在本實用新型的一個技術方案中,墻板裝夾機械手還包括警示裝置,當第一傳感器第二傳感器、第三傳感器被觸發后警示裝置報警;
7、警示裝置與第一傳感器、第二傳感器和第三傳感器一一對應通信連接。
8、在本實用新型的一個技術方案中,墻板裝夾機械手還包括支撐于基體上的標線裝置,標線裝置能夠投射裝配基線;裝配基線以工作面為基準投射;標線裝置位于第二夾持組件一側,并適于在第二夾持組件一側投射裝配基線。
9、在本實用新型的一個技術方案中,第一夾持組件和第二夾持組件之間形成墻板的寬度方向側的第一夾持空間;
10、厚度夾持組件包括活動連接于基體上的第三夾持組件,第三夾持組件和基體之間形成墻板厚度方向側的第二夾持空間。
11、在本實用新型的一個技術方案中,第一傳感器和第三傳感器均位于工作面以下,第一傳感器的觸發平面向所述墻板方向凸出于工作面或與工作面共面,第三傳感器的觸發平面與工作面共面;第二傳感器安裝于第一夾持組件的同側,且第二傳感器的觸發平面保持與第一夾持組件與墻板的接觸面共面。
12、在本實用新型的一個技術方案中,第一夾持組件包括連接塊、滑動壓塊和第一鎖緊件,連接塊固定連接于基體上;
13、滑動壓塊與第二夾持組件之間形成第一夾持空間;滑動壓塊沿墻板的寬度方向滑動連接于連接塊上,且能夠通過第一鎖緊件鎖緊,以改變第二夾持空間的寬度。
14、在本實用新型的一個技術方案中,第三夾持組件包括沿墻板長度方向鉸接于基體上的第一彎臂和沿墻板長度方向鉸接于第一彎臂上的第一擺動壓塊,第一擺動壓塊和工作面之間形成第二夾持空間,第一彎臂能夠伸縮,以改變第二夾持空間的厚度。
15、在本實用新型的一個技術方案中,第一彎臂包括連接基體的第一本體和連接第一擺動壓塊的第二本體,第一本體和第二本體滑動連接;
16、第一彎臂還包括能夠鎖緊第一本體和第二本體滑動連接關系的第二鎖緊件;
17、第一本體呈直線狀延伸,第二本體呈l狀延伸,第二本體的直線段與第一本體滑動連接。
18、在本實用新型的一個技術方案中,墻板裝夾機械手還包括緩沖層,第一夾持組件、第二夾持組件、第三夾持組件和基體朝向墻板的表面上均設有緩沖層,基體上的緩沖層與墻板接觸的表面形成工作面。
19、第二方面,本實用新型提供一種墻板安裝機器人,包括上述任一技術方案中的墻板裝夾機械手。
20、(三)有益效果
21、本實用新型的有益效果是:本實用新型的墻板裝夾機械手和墻板安裝機器人,第一傳感器用于檢測墻板是否接近基體的工作面,觸發閾值可設置為10mm或10mm以內,第二傳感器用于檢測墻板是否接觸第一夾持組件,第三傳感器用來檢測厚度夾持裝置是否已經夾緊墻板,在三個傳感器的協同作用下,能夠提示工作人員墻板裝夾機械手移動和抓取墻板時的到位情況,使墻板安裝機器人在使用過程中更加便捷,還能夠避免墻板或者機械手因為工作面碰撞墻板。
22、同時,第一傳感器、第二傳感器和第三傳感器還可配合控制系統,為機械手的自動控制提供硬件基礎,進而實現機械手對墻板的自動化夾取,提高工作效率。
技術特征:
1.一種墻板裝夾機械手,其特征在于:包括:
2.如權利要求1所述的墻板裝夾機械手,其特征在于:所述墻板裝夾機械手還包括警示裝置,當所述第一傳感器(4)、所述第二傳感器(5)、所述第三傳感器(6)被觸發后,所述警示裝置報警;
3.如權利要求1所述的墻板裝夾機械手,其特征在于:所述墻板裝夾機械手還包括支撐于所述基體(1)上的標線裝置(7),所述標線裝置(7)能夠投射裝配基線;
4.如權利要求1-3中任一項所述的墻板裝夾機械手,其特征在于:所述第一夾持組件(21)和所述第二夾持組件(22)之間形成所述墻板的寬度方向側的第一夾持空間;
5.如權利要求4所述的墻板裝夾機械手,其特征在于:所述第一傳感器(4)和所述第三傳感器(6)均位于所述工作面(a)以下,所述第一傳感器(4)的觸發平面向所述墻板方向凸出于所述工作面(a)或與所述工作面(a)共面,所述第三傳感器(6)的觸發平面與所述工作面(a)共面;所述第二傳感器(5)安裝于所述第一夾持組件(21)的同側,且所述第二傳感器(5)的觸發平面保持與所述第一夾持組件(21)與所述墻板的接觸面共面。
6.如權利要求4所述的墻板裝夾機械手,其特征在于:所述第一夾持組件(21)包括連接塊(211)、滑動壓塊(212)和第一鎖緊件,所述連接塊(211)固定連接于所述基體(1)上;
7.如權利要求4所述的墻板裝夾機械手,其特征在于:所述第三夾持組件(31)包括沿所述墻板長度方向鉸接于所述基體(1)上的第一彎臂(311)和沿所述墻板長度方向鉸接于所述第一彎臂(311)上的第一擺動壓塊(312),所述第一擺動壓塊(312)和所述工作面(a)之間形成所述第二夾持空間,所述第一彎臂(311)能夠伸縮,以改變所述第二夾持空間的厚度。
8.如權利要求7所述的墻板裝夾機械手,其特征在于:所述第一彎臂(311)包括連接所述基體(1)的第一本體(3111)和連接所述第一擺動壓塊(312)的第二本體(3112),所述第一本體(3111)和所述第二本體(3112)滑動連接;
9.如權利要求4所述的墻板裝夾機械手,其特征在于:所述墻板裝夾機械手還包括緩沖層(8),所述第一夾持組件(21)、所述第二夾持組件(22)、所述第三夾持組件(31)和所述基體(1)朝向所述墻板的表面上均設有所述緩沖層(8),所述基體(1)上的所述緩沖層(8)與所述墻板接觸的表面形成所述工作面(a)。
10.一種墻板安裝機器人,其特征在于:包括如權利要求1-9中任意一項所述的墻板裝夾機械手。
技術總結
本技術涉及一種墻板裝夾機械手和墻板安裝機器人,包括基體、連接于基體上的寬度夾單元、厚度夾單元,以及設于基體上的第一傳感器、第二傳感器和第三傳感器,厚度夾單元能夠將墻板壓緊在工作面上;當工作面與墻板間距達到閾值時,第一傳感器被觸發;當第一夾持組件的夾持面接觸墻板時,第二傳感器被觸發;當厚度夾單元夾緊墻板時,第三傳感器被觸發,其有益效果是在三個傳感器的協同作用下,能夠提示工作人員墻板裝夾機械手移動和抓取墻板時的到位情況,使墻板安裝機器人在使用過程中更加便捷,還能夠避免墻板或者機械手因為工作面碰撞墻板。
技術研發人員:周身林,謝貴全,蘇天童,張存憲,王棟,田密,陳誠,張營,唐聰,胡飛
受保護的技術使用者:筑邦建筑技術(重慶)有限公司
技術研發日:20240528
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!