基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人
本發(fā)明屬于建筑機器人,具體是一種基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人。
背景技術:
1、玻璃幕墻的安裝包含測量放線、預埋件施工、連接件與立柱的安裝、橫梁安裝、玻璃板安裝、門窗扇安裝、打膠密封處理、淋水試驗和施工檢驗九個步驟,其中打膠密封對于保證玻璃幕墻安裝的密封和防水性具有重要作用。目前,玻璃幕墻的填縫涂膠工作主要依靠人工高空作業(yè)完成,不僅涂膠效率低、工作強度大,而且存在高空墜落的重大安全隱患。因此,開發(fā)玻璃幕墻填縫涂膠作業(yè)的自動化機器人具有重大現(xiàn)實意義。
2、現(xiàn)有的可在玻璃幕墻上作業(yè)的基于負壓吸附原理的爬壁機器人,例如,玻璃幕墻清潔機器人,大多只適用于平坦無障礙的玻璃墻面,對于有凸起橫梁的墻面,則因無法跨過障礙而難以保證作業(yè)的自動化。因此,本發(fā)明結合玻璃幕墻填縫涂膠作業(yè)的實際工況,提出一種基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人。
技術實現(xiàn)思路
1、針對現(xiàn)有技術的不足,本發(fā)明擬解決的技術問題是,提供一種基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人。
2、本發(fā)明解決所述技術問題采用如下的技術方案:
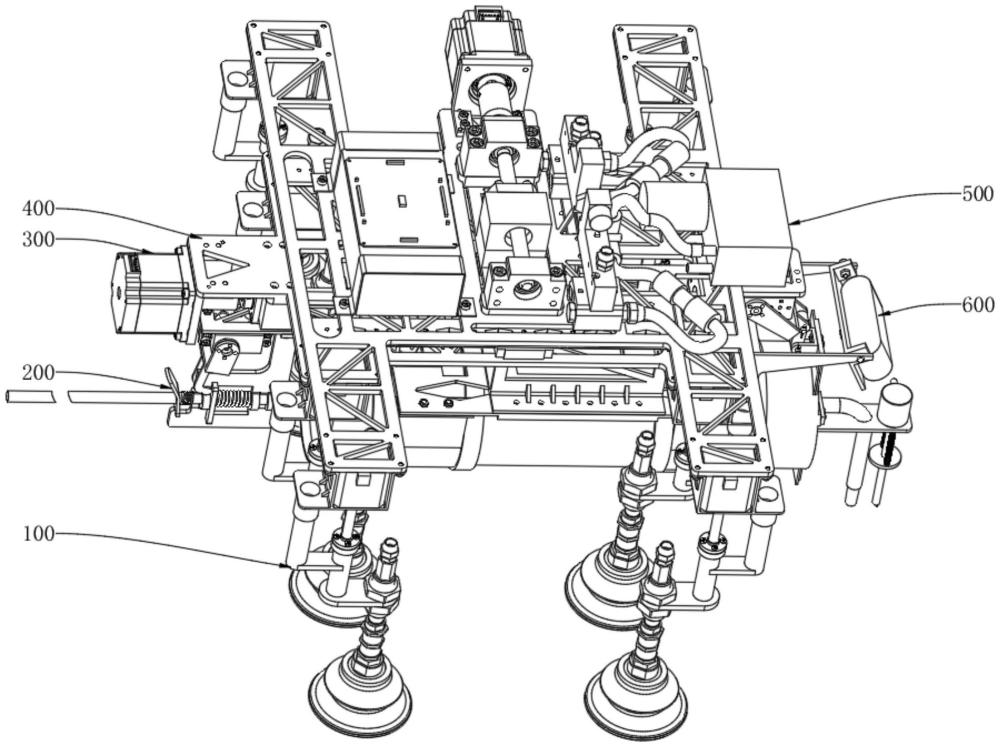
3、一種基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,其特征在于,該機器人包括負壓吸附伸縮腿、涂膠執(zhí)行模塊、交替運動驅動模塊和機體框架;機體框架分為上機架和下機架,兩個機架相互獨立且每個機架的左、右兩側分別設有多個負壓吸附伸縮腿;交替運動驅動模塊與上機架和下機架連接,驅動上機架和下機架交替運動;
4、所述交替運動驅動模塊包括一號直線驅動模組、二號直線驅動模組、一號工字型推板、一號直線導軌、二號工字型推板、二號直線導軌、二號導軌滑塊和一號導軌滑塊;一號工字型推板的左右兩側分別安裝有一號直線導軌,兩個一號直線導軌上均設有一號導軌滑塊,一號導軌滑塊同時與下機架固連;一號直線驅動模組沿前后方向安裝在下機架上,一號直線驅動模組的絲杠螺母與二號工字型推板固連,二號工字型推板的前后兩側分別安裝有二號直線導軌,兩個二號直線導軌上均設有二號導軌滑塊,二號導軌滑塊并與上機架固連;二號直線驅動模組沿左右方向安裝在上機架上,二號直線驅動模組的絲杠螺母與一號工字型推板固連;一號直線驅動模組驅動上機架和下機架沿前后方向運動,二號直線驅動模組驅動上機架和下機架沿左右方向運動,一號直線驅動模組和二號直線驅動模組共同驅動上機架和下機架斜向運動,通過上、下機架的交替運動實現(xiàn)機器人行走。
5、進一步的,所述涂膠執(zhí)行模塊包括滑板膠嘴、膠桶、提升桿件、提升舵機、膠桶安裝件、z形連接板、打膠舵機、膠槍扳手和膠槍;膠桶安裝件與下機架的中部連接,膠桶與膠桶安裝件固連,打膠舵機固定在z形連接板上,打膠舵機的輸出端與膠槍扳手的上端固連,膠槍扳手的下端與膠槍的推桿緊密接觸;提升舵機位于下機架的前端,提升舵機的輸出軸與提升桿件的一端連接,提升桿件的另一端與滑板膠嘴的滑板上端鉸接,滑板膠嘴的滑板同時與膠桶前端的滑槽滑動連接。
6、進一步的,所述負壓吸附伸縮腿包括絲杠電機、電機安裝件、吸盤連接件和真空吸盤;絲杠電機通過電機安裝件與對應的機架固連,吸盤連接件的中部與絲杠電機的輸出軸滑動連接,真空吸盤安裝在吸盤連接件的一側。
7、進一步的,所述一號直線驅動模組和二號直線驅動模組均包括步進電機、電機支座、絲杠固定端軸承座、絲杠螺母、絲杠和絲杠支撐端軸承座;絲杠分別通過絲杠固定端軸承座和絲杠支撐端軸承座轉動安裝在對應的機架上,絲杠的固定端通過聯(lián)軸器與步進電機的輸出軸連接,步進電機通過電機支座安裝在對應的機架上,絲杠螺母滑動連接在絲杠上。
8、進一步的,所述機器人還包括檢測識別模塊;檢測識別模塊包括偏移探針、回位彈簧、角度傳感器、深度相機和相機支架;深度相機通過相機支架安裝在膠桶前端,角度傳感器與滑板膠嘴的前端固連并插入偏移探針內(nèi),偏移探針的連接盤和滑板膠嘴之間設有回位彈簧。
9、相較于現(xiàn)有技術,本發(fā)明具有如下有益效果:
10、1.本發(fā)明能夠實現(xiàn)玻璃幕墻填縫涂膠的自動化,實現(xiàn)爬壁機器人在玻璃幕墻填縫涂膠作業(yè)方面的應用,有利于解決人工涂膠存在的工作強度大、效率低和危險系數(shù)高等問題。
11、2.本發(fā)明采用上、下機架交替吸附的移動方式實現(xiàn)機器人行走,不僅使該機器人具有足式機器人可跨越凸起障礙的優(yōu)點,而且控制更為簡單,運動更為穩(wěn)定。上、下機架分別通過兩個直線驅動模組實現(xiàn)相對移動,并且兩個直線驅動模組的直線運動可合成,實現(xiàn)機器人在玻璃幕墻上沿任意方向的移動,有利于快速調(diào)整機器人的運動軌跡。
12、3.本發(fā)明利用真空氣路單向閥和二位三通常閉式電磁閥實現(xiàn)用一個真空泵控制兩組真空吸盤的真空吸附和破真空,節(jié)省了真空系統(tǒng)的安裝空間,并降低了機器人的總體重量。
技術特征:
1.一種基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,其特征在于,該機器人包括負壓吸附伸縮腿、涂膠執(zhí)行模塊、交替運動驅動模塊和機體框架;機體框架分為上機架和下機架,兩個機架相互獨立且每個機架的左、右兩側分別設有多個負壓吸附伸縮腿;交替運動驅動模塊與上機架和下機架連接,驅動上機架和下機架交替運動;
2.根據(jù)權利要求1所述的基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,其特征在于,所述涂膠執(zhí)行模塊包括滑板膠嘴、膠桶、提升桿件、提升舵機、膠桶安裝件、z形連接板、打膠舵機、膠槍扳手和膠槍;膠桶安裝件與下機架的中部連接,膠桶與膠桶安裝件固連,打膠舵機固定在z形連接板上,打膠舵機的輸出端與膠槍扳手的上端固連,膠槍扳手的下端與膠槍的推桿緊密接觸;提升舵機位于下機架的前端,提升舵機的輸出軸與提升桿件的一端連接,提升桿件的另一端與滑板膠嘴的滑板上端鉸接,滑板膠嘴的滑板同時與膠桶前端的滑槽滑動連接。
3.根據(jù)權利要求1或2所述的基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,其特征在于,所述負壓吸附伸縮腿包括絲杠電機、電機安裝件、吸盤連接件和真空吸盤;絲杠電機通過電機安裝件與對應的機架固連,吸盤連接件的中部與絲杠電機的輸出軸滑動連接,真空吸盤安裝在吸盤連接件的一側。
4.根據(jù)權利要求1所述的基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,其特征在于,所述一號直線驅動模組和二號直線驅動模組均包括步進電機、電機支座、絲杠固定端軸承座、絲杠螺母、絲杠和絲杠支撐端軸承座;絲杠分別通過絲杠固定端軸承座和絲杠支撐端軸承座轉動安裝在對應的機架上,絲杠的固定端通過聯(lián)軸器與步進電機的輸出軸連接,步進電機通過電機支座安裝在對應的機架上,絲杠螺母滑動連接在絲杠上。
5.根據(jù)權利要求1或4所述的基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,其特征在于,所述機器人還包括檢測識別模塊;檢測識別模塊包括偏移探針、回位彈簧、角度傳感器、深度相機和相機支架;深度相機通過相機支架安裝在膠桶前端,角度傳感器與滑板膠嘴的前端固連并插入偏移探針內(nèi),偏移探針的連接盤和滑板膠嘴之間設有回位彈簧。
技術總結
本發(fā)明公開一種基于負壓吸附原理的玻璃幕墻填縫涂膠作業(yè)機器人,包括負壓吸附伸縮腿、涂膠執(zhí)行模塊、交替運動驅動模塊和機體框架;機體框架分為上機架和下機架,兩個機架的兩側分別設有負壓吸附伸縮腿;交替運動驅動模塊包括一號直線驅動模組、二號直線驅動模組、一號工字型推板、一號直線導軌、二號工字型推板、二號直線導軌、二號導軌滑塊和一號導軌滑塊;一號工字型推板的左右側分別設有一號直線導軌,一號直線導軌上設有一號導軌滑塊;一號直線驅動模組沿前后方向安裝在下機架上,其絲杠螺母與二號工字型推板固連,二號工字型推板的前后兩側分別安裝有二號直線導軌,二號直線導軌上設有二號導軌滑塊;二號直線驅動模組沿左右方向安裝在上機架上,且絲杠螺母與一號工字型推板固連。該機器人實現(xiàn)了玻璃幕墻填縫涂膠的自動化,且可跨越凸起障礙。
技術研發(fā)人員:張浩,郄彥輝,趙彥兵,張海濤,李勇斌
受保護的技術使用者:河北工業(yè)大學
技術研發(fā)日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!