機械臂的位置修正方法、裝置、電子設備及存儲介質與流程
本申請涉及自動化,尤其涉及一種機械臂的位置修正方法、裝置、電子設備及存儲介質。
背景技術:
1、機械臂是人工智能、自動化和控制學等多個領域交叉應用的產物,在各個領域都有廣泛應用。例如,在快遞分揀領域用于分揀任務,在工業領域用于零件的裝配、加工和焊接。在這些結構化場景中,機械臂通常通過示教器或離線方式完成特定任務,以使示教后的機械臂能夠對工作點位上的物體進行搬運或抓取。
2、但是,機械臂在長時間工作后,容易出現位置上的偏差,需要使機械臂停止運行并人工重新示教后才能保證后續機械臂的穩定工作。
技術實現思路
1、為了解決上述問題,本申請提出一種機械臂的位置修正方法、裝置、電子設備及存儲介質,能夠在機械臂不停機的情況下對其進行位置偏差的修正,從而保證了機械臂的穩定工作。
2、根據本申請實施例的第一方面,提供了一種機械臂的位置修正方法,包括:
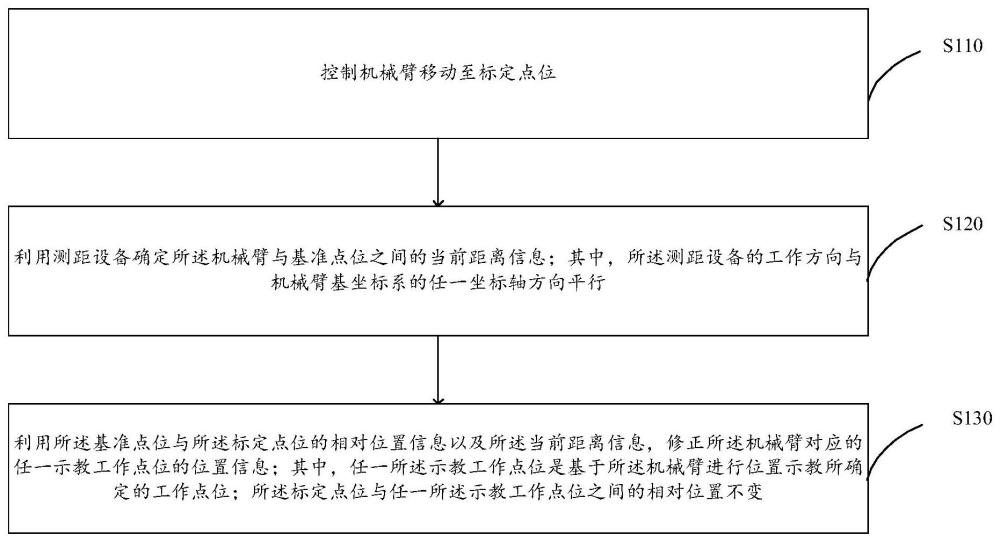
3、控制機械臂移動至標定點位;
4、利用測距設備確定所述機械臂與基準點位之間的當前距離信息;其中,所述測距設備的工作方向與機械臂基坐標系的任一坐標軸方向平行;
5、利用所述基準點位與所述標定點位的相對位置信息以及所述當前距離信息,修正所述機械臂對應的任一示教工作點位的位置信息;其中,任一所述示教工作點位是基于所述機械臂進行位置示教所確定的工作點位;所述標定點位與任一所述示教工作點位之間的相對位置不變。
6、根據本申請實施例的第二方面,提供了一種機械臂的位置修正裝置,包括:
7、控制模塊,用于控制機械臂移動至標定點位;
8、處理模塊,用于利用測距設備確定所述機械臂與基準點位之間的當前距離信息;其中,所述測距設備的工作方向與機械臂基坐標系的任一坐標軸方向平行;
9、修正模塊,用于利用所述基準點位與所述標定點位的相對位置信息以及所述當前距離信息,修正所述機械臂對應的任一示教工作點位的位置信息;其中,任一所述示教工作點位是基于所述機械臂進行位置示教所確定的工作點位;所述標定點位與任一所述示教工作點位之間的相對位置不變。
10、本申請第三方面提供了一種電子設備,包括:
11、存儲器和處理器;
12、所述存儲器與所述處理器連接,用于存儲程序;
13、所述處理器,通過運行所述存儲器中的程序,實現上述的機械臂的位置修正方法。
14、本申請第四方面提供了一種存儲介質,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器運行時,實現上述的機械臂的位置修正方法。
15、上述申請中的一個實施例具有如下優點或有益效果:
16、控制機械臂移動至標定點位;利用測距設備確定的機械臂與基準點位之間的當前距離信息以及基準點位與標定點位的相對位置信息,對機械臂在標定點位的誤差位置進行推算,從而無需人工重新示教,就能夠確定機械臂的位置上的偏差。又由于標定點位與任一示教工作點位之間的相對位置是不變的,因此,根據標定點位的誤差位置推算結果即可對任一示教工作點位進行修正,進而機械臂不停機就能夠自動對其對應的任一工作點位進行修正,從而保證了機械臂的穩定工作。
技術特征:
1.一種機械臂的位置修正方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,在所述測距設備的工作方向包括機械臂基坐標系的至少兩個坐標軸方向,且測距設備的每個工作方向上對應不同標定點位的情況下,所述控制機械臂移動至標定點位,包括:
3.根據權利要求2所述的方法,其特征在于,在所述測距設備設置在工作臺上的情況下,所述基準點位是測距設備的位置。
4.根據權利要求3所述的方法,其特征在于,在所述工作臺上設置至少兩個測距設備,每個測距設備的工作方向不同的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
5.根據權利要求3所述的方法,其特征在于,在所述工作臺上設置一個測距設備的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
6.根據權利要求2所述的方法,其特征在于,在所述測距設備設置在所述機械臂上的情況下,所述基準點位設置在所述工作臺上,測距設備的每個工作方向上均對應不同的基準點位。
7.根據權利要求6所述的方法,其特征在于,在所述機械臂上設置至少兩個測距設備,每個測距設備的工作方向不同的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
8.根據權利要求6所述的方法,其特征在于,在所述機械臂上設置一個測距設備的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
9.根據權利要求1所述的方法,其特征在于,在所述測距設備的工作方向包括機械臂基坐標系的至少兩個坐標軸方向,且測距設備的每個工作方向上對應同一個標定點位的情況下,所述控制機械臂移動至標定點位,包括:
10.根據權利要求9所述的方法,其特征在于,在所述測距設備設置在工作臺上的情況下,所述基準點位是測距設備的位置。
11.根據權利要求10所述的方法,其特征在于,在所述工作臺上設置至少兩個測距設備,每個測距設備的工作方向不同的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
12.根據權利要求10所述的方法,其特征在于,在所述工作臺上設置一個測距設備的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
13.根據權利要求9所述的方法,其特征在于,在所述測距設備設置在所述機械臂上的情況下,所述基準點位設置在所述工作臺上,測距設備的每個工作方向上均對應不同的基準點位。
14.根據權利要求13所述的方法,其特征在于,在所述機械臂上設置至少兩個測距設備,每個測距設備的工作方向不同的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
15.根據權利要求13所述的方法,其特征在于,在所述機械臂上設置一個測距設備的情況下,所述利用測距設備確定所述機械臂與基準點位之間的當前距離信息,包括:
16.根據權利要求1-15中任一項所述的方法,其特征在于,所述利用所述基準點位與所述標定點位的相對位置信息以及所述當前距離信息,修正所述機械臂對應的任一示教工作點位的位置信息,包括:
17.根據權利要求16所述的方法,其特征在于,在所述測距設備的工作方向包括所述機械臂基坐標系的至少兩個坐標軸方向的情況下,所述根據所述基準點位與所述標定點位的相對位置信息以及所述當前距離信息進行計算,得到修正值,包括:
18.根據權利要求17所述的方法,其特征在于,其中,任一所述工作方向對應的修正值δ=α(l-l0),其中,l表示該工作方向對應的當前距離信息,l0表示該工作方向對應的基準點位與標定點位的相對位置信息,α表示方向系數,所述方向系數表示該工作方向在所述機械臂基坐標系下的正方向或負方向。
19.根據權利要求1-15中任一項所述的方法,其特征在于,所述控制機械臂移動至標定點位,包括:
20.一種機械臂的位置修正裝置,其特征在于,包括:
21.一種電子設備,其特征在于,包括:
22.一種存儲介質,其特征在于,所述存儲介質上存儲有計算機程序,所述計算機程序被處理器運行時,實現如權利要求1至19中任意一項機械臂的位置修正方法。
技術總結
本申請提供了機械臂的位置修正方法、裝置、電子設備及存儲介質,包括:控制機械臂移動至標定點位;利用測距設備確定所述機械臂與基準點位之間的當前距離信息;其中,所述測距設備的工作方向與機械臂基坐標系的任一坐標軸方向平行;利用所述基準點位與所述標定點位的相對位置信息以及所述當前距離信息,修正所述機械臂對應的任一示教工作點位的位置信息;其中,任一所述示教工作點位是基于所述機械臂進行位置示教所確定的工作點位;所述標定點位與任一所述示教工作點位之間的相對位置不變。根據本申請的技術方案,能夠在機械臂不停機的情況下對其進行位置偏差的修正,從而保證了機械臂的穩定工作。
技術研發人員:徐先祥,黃應潭,吳步青
受保護的技術使用者:深圳晶泰科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!