三次元輸送機(jī)械手的制作方法
本技術(shù)涉及機(jī)械手,具體涉及一種三次元輸送機(jī)械手。
背景技術(shù):
1、三次元多工位送料機(jī)械手又稱三次元機(jī)械手,三次元機(jī)械手在工業(yè)生產(chǎn)中具有良好的應(yīng)用前景,可適應(yīng)于大噸位沖床沖壓生產(chǎn)中,將板材或者成型料在多工序模具之間移送的傳送裝置,作為一臺高效的精密沖壓自動(dòng)化設(shè)備,三次元機(jī)械手具有適用性廣、機(jī)臺效率高,安全性高,數(shù)字化程度高,智能化程度高,整機(jī)穩(wěn)定性高等特性,三次元機(jī)械手給產(chǎn)品生產(chǎn)帶來很大的方便,是現(xiàn)代熱沖壓生產(chǎn)技術(shù)的重要發(fā)展方向。
2、如公布號“cn117400282a”,名稱為“一種三次元多工位送料機(jī)械手及其安裝方法”公開了一種三次元多工位送料機(jī)械手,包括若干個(gè)立柱以及縱梁,縱梁上橫向有縱向驅(qū)動(dòng)安裝板,縱向驅(qū)動(dòng)安裝板上有豎向驅(qū)動(dòng)機(jī)械臂,豎向驅(qū)動(dòng)機(jī)械臂上有驅(qū)動(dòng)連接臂,驅(qū)動(dòng)連接臂上有電動(dòng)伸縮桿,電動(dòng)伸縮桿上有機(jī)械手推動(dòng)板,機(jī)械手推動(dòng)板上有步進(jìn)電機(jī),步進(jìn)電機(jī)上有送料機(jī)械手,送料機(jī)械手上轉(zhuǎn)動(dòng)設(shè)置有上夾板、下夾板、彈簧和夾板限位推板;其雖然能實(shí)現(xiàn)往復(fù)運(yùn)動(dòng)送料的目的,但是驅(qū)動(dòng)連接臂是不能作合攏動(dòng)作的,而是在驅(qū)動(dòng)連接臂上依次排列設(shè)有若干電動(dòng)伸縮桿,通過同時(shí)控制各個(gè)電動(dòng)伸縮桿的伸縮動(dòng)作來實(shí)現(xiàn)松夾動(dòng)作,控制相對麻煩,也難以確保工作的同步性,而且布線復(fù)雜。
技術(shù)實(shí)現(xiàn)思路
1、針對上述不足,本實(shí)用新型的目的在于,提供一種結(jié)構(gòu)設(shè)計(jì)簡單、合理,控制方便,工作穩(wěn)定性好的三次元輸送機(jī)械手。
2、為實(shí)現(xiàn)上述目的,本實(shí)用新型所提供的技術(shù)方案是:
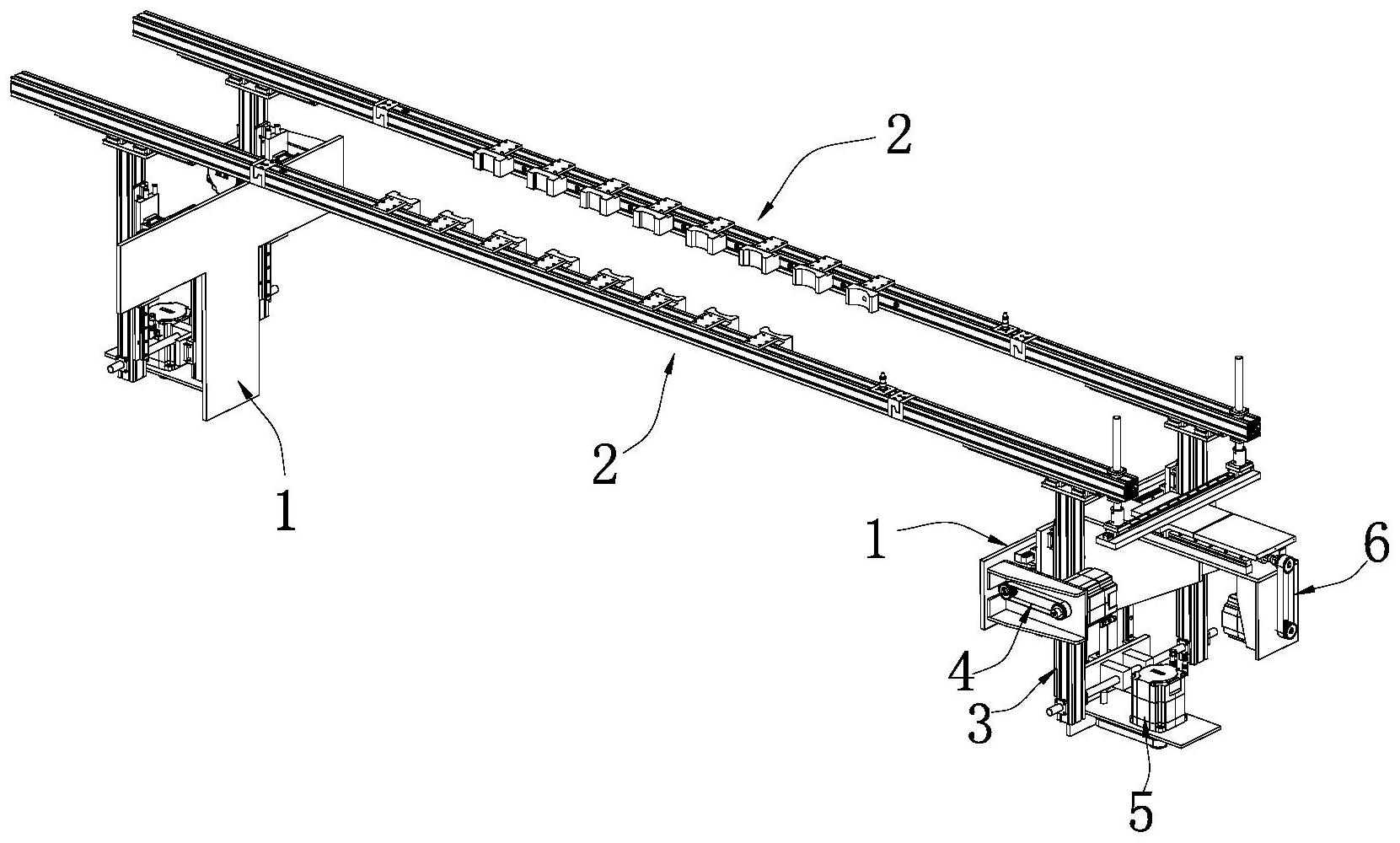
3、一種三次元輸送機(jī)械手,其包括兩相對間隔設(shè)置的安裝座、搬移手臂、支撐桿、分合絲桿驅(qū)動(dòng)模組、升降絲桿驅(qū)動(dòng)模組和輸送絲桿驅(qū)動(dòng)模組,所述分合絲桿驅(qū)動(dòng)模組安裝在所述安裝座上,兩條支撐桿通過z軸滑軌組件設(shè)置在所述分合絲桿驅(qū)動(dòng)模組上,并受該分合絲桿驅(qū)動(dòng)模組的驅(qū)動(dòng)沿y軸方向相對作分合動(dòng)作,所述升降絲桿驅(qū)動(dòng)模組設(shè)置在所述安裝座上,并能驅(qū)動(dòng)兩條支撐桿沿z軸方向作升降動(dòng)作,所述搬移手臂通過x軸滑軌組件設(shè)置在所述支撐桿上,所述輸送絲桿驅(qū)動(dòng)模組設(shè)置在其中一安裝座上,并能驅(qū)動(dòng)搬移手臂沿x軸方向作直線往復(fù)運(yùn)動(dòng),兩搬移手臂相對的內(nèi)側(cè)壁上間隔排列有若干夾塊。通過搬移手臂、分合絲桿驅(qū)動(dòng)模組、升降絲桿驅(qū)動(dòng)模組和輸送絲桿驅(qū)動(dòng)模組的協(xié)同工作,實(shí)現(xiàn)搬移手臂在三維空間內(nèi)的精確搬運(yùn)。
4、作為本實(shí)用新型的一種優(yōu)選方案,所述搬移手臂和支撐桿均為鋁材桿體,具有輕質(zhì)和高強(qiáng)度特性,同時(shí)減少機(jī)械手的整體重量,降低慣性,提高響應(yīng)速度和精度。
5、作為本實(shí)用新型的一種優(yōu)選方案,所述夾塊上設(shè)有夾待凹位,用于夾持物品,有效增加夾持穩(wěn)定性。
6、作為本實(shí)用新型的一種優(yōu)選方案,所述安裝座外形呈t字形,提供了穩(wěn)定的支撐和安裝基礎(chǔ),方便安裝和調(diào)試。
7、作為本實(shí)用新型的一種優(yōu)選方案,所述分合絲桿驅(qū)動(dòng)模組包括分合電機(jī)和兩滑座,兩滑座通過y軸滑軌組件活動(dòng)設(shè)置在安裝座兩側(cè),對應(yīng)兩滑座的位置分別設(shè)有兩y軸絲桿副,兩y軸絲桿副通過聯(lián)軸器相連接,所述分合電機(jī)通過傳動(dòng)組件與其中一y軸絲桿副相連接。通過分合電機(jī)驅(qū)動(dòng)y軸絲桿副,使兩滑座沿y軸方向相對作分合動(dòng)作。
8、作為本實(shí)用新型的一種優(yōu)選方案,所述升降絲桿驅(qū)動(dòng)模組包括升降電機(jī)、升降滑座和聯(lián)動(dòng)桿,所述升降滑座通過升降滑軌組件設(shè)置在安裝座的下部位置,所述升降電機(jī)通過z軸絲桿副驅(qū)動(dòng)升降滑座沿z軸方向作升降動(dòng)作,所述聯(lián)動(dòng)桿的中部與所述升降滑座相固定,兩端對應(yīng)與兩條支撐桿相連接。通過升降電機(jī)驅(qū)動(dòng)z軸絲桿副,使升降滑座沿z軸方向作升降動(dòng)作。
9、作為本實(shí)用新型的一種優(yōu)選方案,所述輸送絲桿驅(qū)動(dòng)模組包括支架、橫桿、橫向滑軌、橫向滑座、光軸、直線軸承座、輸送電機(jī)和輸送滑座,所述輸送滑座通過縱向滑軌組件設(shè)置在所述支架上,所述輸送電機(jī)設(shè)置在支架上,并能通過x軸絲桿副驅(qū)動(dòng)輸送滑座沿x軸方向作往復(fù)運(yùn)動(dòng),所述橫桿的中部固定在所述輸送滑座上,所述橫向滑軌設(shè)置在所述橫桿的上表面,兩個(gè)橫向滑座活動(dòng)設(shè)置在所述橫向滑軌上,所述光軸垂直設(shè)置在所述橫向滑座上,所述直線軸承座固定在所述搬移手臂上,且套設(shè)在所述光軸上。通過輸送電機(jī)驅(qū)動(dòng)x軸絲桿副,使輸送滑座沿x軸方向作往復(fù)運(yùn)動(dòng),從而帶動(dòng)搬移手臂作進(jìn)退動(dòng)作。
10、作為本實(shí)用新型的一種優(yōu)選方案,所述搬移手臂包括更換中段和兩條位于所述更換中段兩端的固定段,所述更換中段的兩端設(shè)有壓鉤,所述固定段上設(shè)有與所述壓鉤相適配的托鉤。搬移手臂由更換中段和兩條固定段組成,通過壓鉤和托鉤的配合可以實(shí)現(xiàn)中段的快速更換。
11、本實(shí)用新型的有益效果為:本實(shí)用新型結(jié)構(gòu)設(shè)計(jì)合理,通過分合絲桿驅(qū)動(dòng)模組、升降絲桿驅(qū)動(dòng)模組和輸送絲桿驅(qū)動(dòng)模組的協(xié)同配合工作相應(yīng)控制兩搬移手臂作分合、升降和進(jìn)退動(dòng)作,從而實(shí)現(xiàn)逐步向前搬運(yùn)工件的目的,而且各驅(qū)動(dòng)模組均是采用絲杠傳動(dòng)結(jié)構(gòu),具有速度快、穩(wěn)定性好的優(yōu)點(diǎn),有效提升機(jī)械手動(dòng)作的精確性和工作效率。同時(shí)是通過兩搬移手臂的分合來帶動(dòng)所有夾塊同時(shí)作夾待和松動(dòng)動(dòng)作,同步性好,且有效解決了傳統(tǒng)需單一控制的復(fù)雜結(jié)構(gòu)問題,另外是采用一個(gè)輸送絲桿驅(qū)動(dòng)模組來實(shí)現(xiàn)兩搬移手臂的進(jìn)退動(dòng)作,進(jìn)一步簡化結(jié)構(gòu),降低成本,利于廣泛推廣。
12、下面結(jié)合附圖與實(shí)施例,對本實(shí)用新型進(jìn)一步說明。
技術(shù)特征:
1.一種三次元輸送機(jī)械手,其包括兩相對間隔設(shè)置的安裝座,其特征在于,其還包括搬移手臂、支撐桿、分合絲桿驅(qū)動(dòng)模組、升降絲桿驅(qū)動(dòng)模組和輸送絲桿驅(qū)動(dòng)模組,所述分合絲桿驅(qū)動(dòng)模組安裝在所述安裝座上,兩條支撐桿通過z軸滑軌組件設(shè)置在所述分合絲桿驅(qū)動(dòng)模組上,并受該分合絲桿驅(qū)動(dòng)模組的驅(qū)動(dòng)沿y軸方向相對作分合動(dòng)作,所述升降絲桿驅(qū)動(dòng)模組設(shè)置在所述安裝座上,并能驅(qū)動(dòng)兩條支撐桿沿z軸方向作升降動(dòng)作,所述搬移手臂通過x軸滑軌組件設(shè)置在所述支撐桿上,所述輸送絲桿驅(qū)動(dòng)模組設(shè)置在其中一安裝座上,并能驅(qū)動(dòng)搬移手臂沿x軸方向作直線往復(fù)運(yùn)動(dòng),兩搬移手臂相對的內(nèi)側(cè)壁上間隔排列有若干夾塊。
2.根據(jù)權(quán)利要求1所述的三次元輸送機(jī)械手,其特征在于:所述搬移手臂和支撐桿均為鋁材桿體。
3.根據(jù)權(quán)利要求1所述的三次元輸送機(jī)械手,其特征在于:所述夾塊上設(shè)有夾待凹位。
4.根據(jù)權(quán)利要求1所述的三次元輸送機(jī)械手,其特征在于:所述安裝座外形呈t字形。
5.根據(jù)權(quán)利要求1所述的三次元輸送機(jī)械手,其特征在于:所述分合絲桿驅(qū)動(dòng)模組包括分合電機(jī)和兩滑座,兩滑座通過y軸滑軌組件活動(dòng)設(shè)置在安裝座兩側(cè),對應(yīng)兩滑座的位置分別設(shè)有兩y軸絲桿副,兩y軸絲桿副通過聯(lián)軸器相連接,所述分合電機(jī)通過傳動(dòng)組件與其中一y軸絲桿副相連接。
6.根據(jù)權(quán)利要求1所述的三次元輸送機(jī)械手,其特征在于:所述升降絲桿驅(qū)動(dòng)模組包括升降電機(jī)、升降滑座和聯(lián)動(dòng)桿,所述升降滑座通過升降滑軌組件設(shè)置在安裝座的下部位置,所述升降電機(jī)通過z軸絲桿副驅(qū)動(dòng)升降滑座沿z軸方向作升降動(dòng)作,所述聯(lián)動(dòng)桿的中部與所述升降滑座相固定,兩端對應(yīng)與兩條支撐桿相連接。
7.根據(jù)權(quán)利要求1所述的三次元輸送機(jī)械手,其特征在于:所述輸送絲桿驅(qū)動(dòng)模組包括支架、橫桿、橫向滑軌、橫向滑座、光軸、直線軸承座、輸送電機(jī)和輸送滑座,所述輸送滑座通過縱向滑軌組件設(shè)置在所述支架上,所述輸送電機(jī)設(shè)置在支架上,并能通過x軸絲桿副驅(qū)動(dòng)輸送滑座沿x軸方向作往復(fù)運(yùn)動(dòng),所述橫桿的中部固定在所述輸送滑座上,所述橫向滑軌設(shè)置在所述橫桿的上表面,兩個(gè)橫向滑座活動(dòng)設(shè)置在所述橫向滑軌上,所述光軸垂直設(shè)置在所述橫向滑座上,所述直線軸承座固定在所述搬移手臂上,且套設(shè)在所述光軸上。
8.根據(jù)權(quán)利要求1-7任意一項(xiàng)所述的三次元輸送機(jī)械手,其特征在于:所述搬移手臂包括更換中段和兩條位于所述更換中段兩端的固定段,所述更換中段的兩端設(shè)有壓鉤,所述固定段上設(shè)有與所述壓鉤相適配的托鉤。
技術(shù)總結(jié)
本技術(shù)公開了一種三次元輸送機(jī)械手,其包括兩相對間隔設(shè)置的安裝座、搬移手臂、支撐桿、分合絲桿驅(qū)動(dòng)模組、升降絲桿驅(qū)動(dòng)模組和輸送絲桿驅(qū)動(dòng)模組。通過分合絲桿驅(qū)動(dòng)模組、升降絲桿驅(qū)動(dòng)模組和輸送絲桿驅(qū)動(dòng)模組的協(xié)同配合工作相應(yīng)控制兩搬移手臂作分合、升降和進(jìn)退動(dòng)作,從而實(shí)現(xiàn)逐步向前搬運(yùn)工件的目的,而且各驅(qū)動(dòng)模組均是采用絲杠傳動(dòng)結(jié)構(gòu),具有速度快、穩(wěn)定性好的優(yōu)點(diǎn),有效提升機(jī)械手動(dòng)作的精確性和工作效率。同時(shí)是通過兩搬移手臂的分合來帶動(dòng)所有夾塊同時(shí)作夾待和松動(dòng)動(dòng)作,同步性好,且有效解決了傳統(tǒng)需單一控制的復(fù)雜結(jié)構(gòu)問題,另外是采用一個(gè)輸送絲桿驅(qū)動(dòng)模組來實(shí)現(xiàn)兩搬移手臂的進(jìn)退動(dòng)作,進(jìn)一步簡化結(jié)構(gòu),降低成本,利于廣泛推廣。
技術(shù)研發(fā)人員:王建華,劉俊香
受保護(hù)的技術(shù)使用者:東莞市金協(xié)智能自動(dòng)化設(shè)備科技有限公司
技術(shù)研發(fā)日:20240311
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!