一種取件機械手的制作方法
本技術涉及壓鑄件抓取,特別涉及一種取件機械手。
背景技術:
1、壓鑄機作為現代制造業的重要設備,廣泛應用于汽車、航空航天、電子等多個領域,壓鑄機在壓力作用下,將熔融金屬液壓射到模具中冷卻成型,開模后得到固體的金屬壓鑄件,例如,汽車發動機缸體、齒輪、剎車盤等部件,都是通過壓鑄機制造出來的,壓鑄機的取件機械手,作為壓鑄機的重要配套設備,負責將壓鑄成型后的產品從模具中取出,并將其轉移至下一道工序。例如,中國專利申請(授權公告號為:cn209550565u)公開的一種取件機的多連桿手臂,其包括夾取手臂,所述夾取手臂的一端設置有夾取頭,所述夾取手臂的另一端側面固定連接有第二連桿,所述第二連桿的另一端轉動連接有第一連桿,所述第一連桿的另一端轉動連接于機箱上方,且固定連接于機箱的輸出軸,所述夾取手臂遠離夾取頭一端的側面轉動連接有從動桿,所述從動桿與第二連桿位于夾取手臂的相同側,且位于第二連桿和夾取頭之間,所述從動桿轉動連接于機箱上方,所述的機箱上方設置有限位機構;該取件機的多連桿手臂運行軌跡穩定、精確;大大增加了取件機的穩定性,然而,上述的取件機械手在操作靈活性方面存在較大的局限性,在面對形狀各異、大小不一的物體時,手臂可能需要更多的調整時間,此外,由于手臂的結構設計相對固定,可能難以應對一些特殊、復雜的抓取任務,因此有必要予以改進。
技術實現思路
1、本實用新型的目的在于針對現有技術的缺陷和不足,提供一種取件機械手,結構簡單合理、操作方便,大臂和小臂均可轉動,使得機械手的運動范圍更大,能夠對夾爪進行旋轉和翻轉,抓取精度高,動作更加靈活。
2、為實現上述目的,本實用新型采用以下技術方案:
3、本實用新型所述的一種取件機械手,包括基座,所述基座上轉動連接有大臂,基座上固定設有大臂驅動電機,大臂驅動電機的輸出端與大臂的前端傳動連接并帶動大臂轉動,所述大臂的末端轉動連接有小臂,大臂上設有用于驅動小臂轉動的小臂驅動電機,小臂驅動電機的輸出端與小臂的前端傳動連接,所述小臂上還設有旋轉電機和轉軸,所述旋轉電機的輸出端與轉軸的前端傳動連接并帶動轉軸沿其軸線旋轉,所述轉軸的末端連接有夾爪氣缸,所述夾爪氣缸的輸出端連接有用于取件的夾爪。
4、進一步地,所述轉軸與夾爪氣缸之間還設有翻轉氣缸,所述翻轉氣缸與轉軸固定連接,翻轉氣缸的輸出端設有翻轉軸和翻轉板,翻轉板的一端與翻轉軸固定連接,翻轉板的另一端與夾爪氣缸固定連接,所述翻轉氣缸通過翻轉軸轉動翻轉板,從而帶動夾爪氣缸實現翻轉。
5、進一步地,所述翻轉板與夾爪氣缸之間還固定設有夾爪轉接板。
6、進一步地,所述夾爪包括兩個夾爪連接塊和與夾爪連接塊一一對應的夾爪本體,所述夾爪連接塊的一端與夾爪氣缸的輸出端滑動連接,所述夾爪連接塊的另一端與夾爪本體固定連接。
7、進一步地,所述夾爪連接塊靠近夾爪氣缸的一端設有滑動塊,所述夾爪氣缸上設有與滑動塊滑動配合的滑軌。
8、進一步地,所述兩個夾爪連接塊沿夾爪氣缸的中心軸呈對稱設置。
9、進一步地,所述夾爪本體遠離夾爪連接塊的一端上設有取件部,所述取件部的內側設有v型槽。
10、進一步地,所述v型槽上設有若干防滑凸起。
11、進一步地,所述大臂驅動電機與大臂之間還設有第一減速機構。
12、進一步地,所述小臂驅動電機與小臂之間還設有第二減速機構。
13、本實用新型的有益效果為:本實用新型所述的一種取件機械手,大臂和小臂均可進行轉動,使得機械手的運動范圍更大,能夠更好地適應不同形狀和尺寸的工件,大臂和小臂之間的協同工作也能夠減少機械手的運動軌跡,縮短取件時間,提高生產效率,此外,取件機械手還設有旋轉電機和翻轉氣缸,能夠對夾爪進行旋轉和翻轉操作,確保取件的準確性,抓取精度高,能夠適應不同方向的取件需求,進一步提高機械手動作的靈活性,使其能夠完成特殊、復雜的抓取任務。
14、本實用新型的工作原理如下:機械手工作時,大臂驅動電機和小臂驅動電機根據預設的程序或操作指令,分別驅動大臂和小臂進行轉動,工作過程中,旋轉電機可以根據需要驅動轉軸進行旋轉運動,以調整夾爪氣缸和夾爪的姿態,確保夾取操作的準確性和穩定性,還可通過翻轉氣缸對夾爪氣缸和夾爪實現翻轉,當夾爪氣缸和夾爪到達指定的取件位置時,夾爪氣缸工作驅動夾爪進行夾取操作,夾取完成后,大臂和小臂再次協同工作,將夾爪和工件帶回至指定位置,完成整個取件流程。
技術特征:
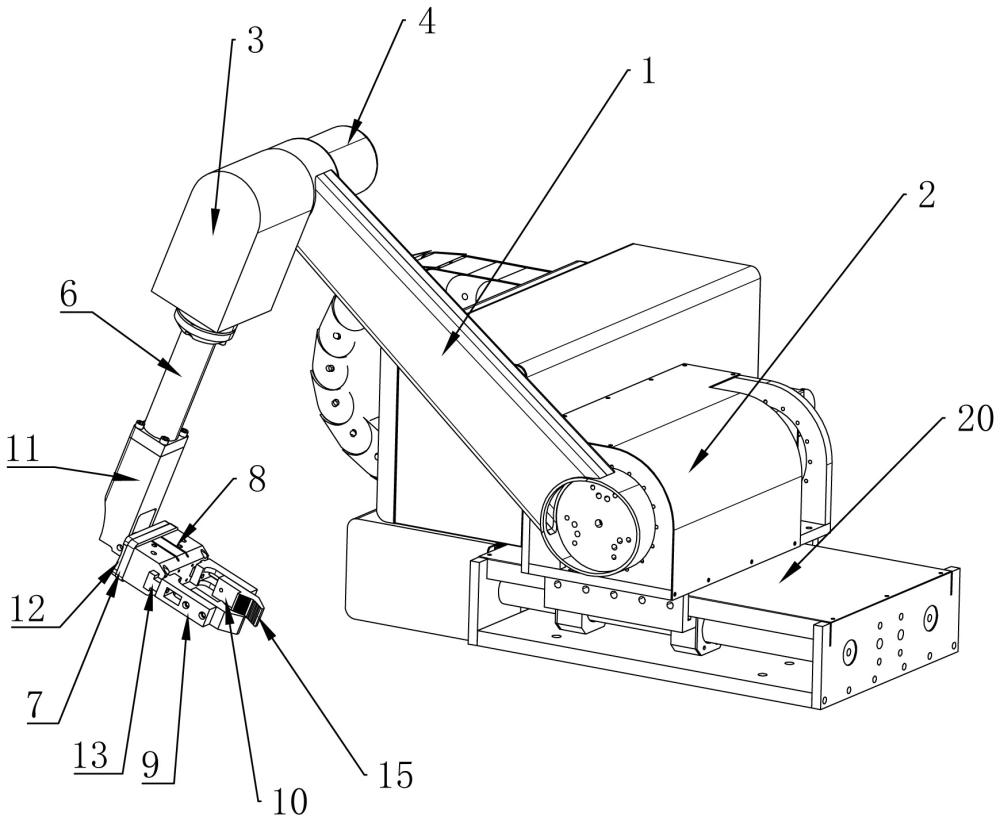
1.一種取件機械手,其特征在于:包括基座(20),所述基座(20)上轉動連接有大臂(1),基座(20)上固定設有大臂驅動電機(2),大臂驅動電機(2)的輸出端與大臂(1)的前端傳動連接并帶動大臂(1)轉動,所述大臂(1)的末端轉動連接有小臂(3),大臂(1)上設有用于驅動小臂(3)轉動的小臂驅動電機(4),小臂驅動電機(4)的輸出端與小臂(3)的前端傳動連接,所述小臂(3)上還設有旋轉電機(5)和轉軸(6),所述旋轉電機(5)的輸出端與轉軸(6)的前端傳動連接并帶動轉軸(6)沿其軸線旋轉,所述轉軸(6)的末端連接有夾爪氣缸(8),所述夾爪氣缸(8)的輸出端連接有用于取件的夾爪。
2.根據權利要求1所述的一種取件機械手,其特征在于:所述轉軸(6)與夾爪氣缸(8)之間還設有翻轉氣缸(11),所述翻轉氣缸(11)與轉軸(6)固定連接,翻轉氣缸(11)的輸出端設有翻轉軸和翻轉板(12),翻轉板(12)的一端與翻轉軸固定連接,翻轉板(12)的另一端與夾爪氣缸(8)固定連接,所述翻轉氣缸(11)通過翻轉軸轉動翻轉板(12),從而帶動夾爪氣缸(8)實現翻轉。
3.根據權利要求2所述的一種取件機械手,其特征在于:所述翻轉板(12)與夾爪氣缸(8)之間還固定設有夾爪轉接板(7)。
4.根據權利要求1所述的一種取件機械手,其特征在于:所述夾爪包括兩個夾爪連接塊(9)和與夾爪連接塊(9)一一對應的夾爪本體(10),所述夾爪連接塊(9)的一端與夾爪氣缸(8)的輸出端滑動連接,所述夾爪連接塊(9)的另一端與夾爪本體(10)固定連接。
5.根據權利要求4所述的一種取件機械手,其特征在于:所述夾爪連接塊(9)靠近夾爪氣缸(8)的一端設有滑動塊(13),所述夾爪氣缸(8)上設有與滑動塊(13)滑動配合的滑軌(14)。
6.根據權利要求4所述的一種取件機械手,其特征在于:所述兩個夾爪連接塊(9)沿夾爪氣缸(8)的中心軸呈對稱設置。
7.根據權利要求4所述的一種取件機械手,其特征在于:所述夾爪本體(10)遠離夾爪連接塊(9)的一端上設有取件部(15),所述取件部(15)的內側設有v型槽(16)。
8.根據權利要求7所述的一種取件機械手,其特征在于:所述v型槽(16)上設有若干防滑凸起(17)。
9.根據權利要求1所述的一種取件機械手,其特征在于:所述大臂驅動電機(2)與大臂(1)之間還設有第一減速機構(18)。
10.根據權利要求1所述的一種取件機械手,其特征在于:所述小臂驅動電機(4)與小臂(3)之間還設有第二減速機構(19)。
技術總結
本技術公開的一種取件機械手,包括基座,基座上轉動連接有大臂,基座上固定設有大臂驅動電機,大臂驅動電機的輸出端與大臂的前端傳動連接并帶動大臂轉動,大臂的末端轉動連接有小臂,大臂上設有小臂驅動電機,小臂驅動電機的輸出端與小臂的前端傳動連接并帶動小臂轉動,小臂上還設有旋轉電機和轉軸,旋轉電機的輸出端與轉軸的前端傳動連接并帶動轉軸沿其軸線旋轉,轉軸的末端連接有夾爪氣缸,夾爪氣缸的輸出端連接有用于取件的夾爪,大臂和小臂均可轉動,使得機械手的運動范圍更大,能夠對夾爪進行旋轉和翻轉,確保取件的準確性,抓取精度高,適應不同方向的取件需求,機械手的動作靈活性高。
技術研發人員:孫仲獻
受保護的技術使用者:寧波市科卓自動化科技有限公司
技術研發日:20240428
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!