特征空間下的基于不同意圖的魯棒自適應(yīng)變導(dǎo)納控制方法
本技術(shù)涉及機(jī)器人多傳感器感知信息融合,特別是涉及一種特征空間下的基于不同意圖的魯棒自適應(yīng)變導(dǎo)納控制方法。
背景技術(shù):
1、精密裝配、零部件檢修和機(jī)器人手術(shù)等工業(yè)與醫(yī)療場(chǎng)景中的物理人機(jī)交互技術(shù),通常依賴力傳感器獲取的接觸信息。然而,這些系統(tǒng)大多缺乏對(duì)具體應(yīng)用場(chǎng)景的深入感知,且在復(fù)雜的操作環(huán)境中,外部沖擊力常常對(duì)機(jī)器人控制系統(tǒng)產(chǎn)生不可逆影響,導(dǎo)致振蕩、不穩(wěn)定甚至失控,進(jìn)而降低系統(tǒng)的動(dòng)態(tài)性能和操作可靠性。因此,設(shè)計(jì)一個(gè)具備豐富感知信息且能夠有效應(yīng)對(duì)外部沖擊干擾的魯棒控制系統(tǒng),已成為提升人機(jī)協(xié)作穩(wěn)定性和性能的關(guān)鍵。
2、柔順控制是實(shí)現(xiàn)機(jī)器人與環(huán)境或人類安全、自然交互的核心技術(shù),已在機(jī)器人接觸任務(wù)中取得了廣泛應(yīng)用。導(dǎo)納控制作為一種協(xié)同控制方法,通過(guò)力傳感器實(shí)現(xiàn),并具備一定的魯棒性,已在物理人機(jī)交互中得到廣泛應(yīng)用。然而,現(xiàn)有控制系統(tǒng)普遍難以兼顧柔順性與魯棒性,在實(shí)際應(yīng)用中,許多研究未能充分考慮外部沖擊力的影響,導(dǎo)致柔順性和魯棒性之間的平衡無(wú)法有效實(shí)現(xiàn)。
3、為了解決這一問(wèn)題,有研究提出了基于人類意圖預(yù)測(cè)的變導(dǎo)納控制方法,取得了一定的成果,但這些方法的控制器設(shè)計(jì)較為復(fù)雜,且計(jì)算量較大。此外,基于剪切增稠流體的阻尼器已在防護(hù)領(lǐng)域得到應(yīng)用,其速度依賴性使其在柔順性和魯棒性方面表現(xiàn)出色,但這些方法通常僅依賴接觸力信息,缺乏對(duì)環(huán)境的深入感知。因此,機(jī)器人需要配備視覺(jué)傳感器,以便在復(fù)雜、非結(jié)構(gòu)化的環(huán)境中實(shí)現(xiàn)更高效的任務(wù)執(zhí)行。
4、視覺(jué)伺服系統(tǒng)憑借其卓越的精確性、適應(yīng)性和自主決策能力,在非結(jié)構(gòu)化環(huán)境中展現(xiàn)出巨大的優(yōu)勢(shì)。通過(guò)結(jié)合圖像反饋,視覺(jué)伺服系統(tǒng)可以實(shí)時(shí)調(diào)整機(jī)器人姿態(tài)和路徑規(guī)劃,已廣泛應(yīng)用于各類機(jī)器人任務(wù)。然而,單獨(dú)依賴力或視覺(jué)傳感器的信號(hào),往往難以滿足復(fù)雜任務(wù)的需求。因此,將視覺(jué)與力傳感器結(jié)合,是解決多樣化任務(wù)的一種有效途徑。通過(guò)視覺(jué)與力信息的融合,機(jī)器人可以在動(dòng)態(tài)環(huán)境中更靈活、精確且安全地進(jìn)行人機(jī)交互。但由于在控制系統(tǒng)設(shè)計(jì)中,力與視覺(jué)信息通常處于不同的執(zhí)行層次,系統(tǒng)往往會(huì)收斂到局部最小值,導(dǎo)致力與視覺(jué)參考的收斂不一致,進(jìn)而影響系統(tǒng)性能。
5、因此,相關(guān)技術(shù)中,亟需一種能夠在特征空間中有效耦合視覺(jué)與力信息的方式。
技術(shù)實(shí)現(xiàn)思路
1、基于此,有必要針對(duì)上述技術(shù)問(wèn)題,提供一種能夠在特征空間中有效耦合視覺(jué)與力信息的特征空間下的基于不同意圖的魯棒自適應(yīng)變導(dǎo)納控制方法。
2、第一方面,本技術(shù)提供了一種特征空間下的基于不同意圖的魯棒自適應(yīng)變導(dǎo)納控制方法。所述方法包括:
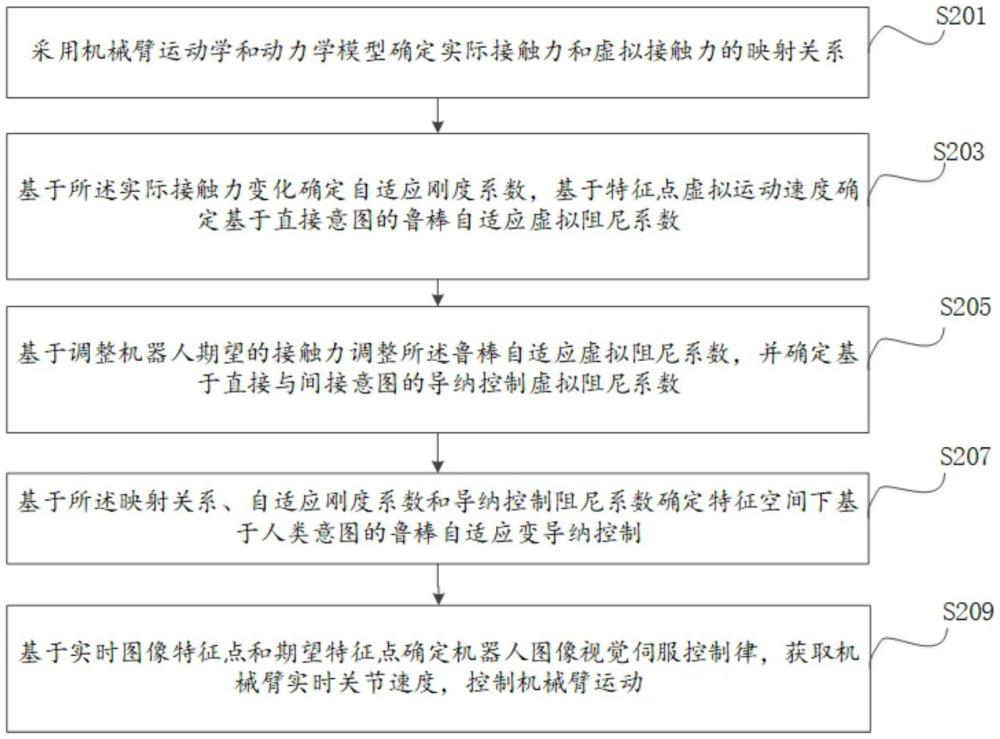
3、采用機(jī)械臂運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型確定實(shí)際接觸力和虛擬接觸力的映射關(guān)系;
4、基于所述實(shí)際接觸力變化確定自適應(yīng)剛度系數(shù),基于特征點(diǎn)虛擬運(yùn)動(dòng)速度確定基于直接意圖的魯棒自適應(yīng)虛擬阻尼系數(shù);
5、基于調(diào)整機(jī)器人期望的接觸力調(diào)整所述魯棒自適應(yīng)虛擬阻尼系數(shù),并確定基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù);
6、基于所述映射關(guān)系、自適應(yīng)剛度系數(shù)和導(dǎo)納控制虛擬阻尼系數(shù)確定特征空間下基于人類意圖的魯棒自適應(yīng)變導(dǎo)納控制;
7、基于實(shí)時(shí)圖像特征點(diǎn)和期望特征點(diǎn)確定機(jī)器人圖像視覺(jué)伺服控制律,獲取機(jī)械臂實(shí)時(shí)關(guān)節(jié)速度,控制機(jī)械臂運(yùn)動(dòng)。
8、可選的,在本技術(shù)的一個(gè)實(shí)施例中,所述采用機(jī)械臂運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型確定實(shí)際接觸力和虛擬接觸力的映射關(guān)系包括:
9、基于機(jī)械臂運(yùn)動(dòng)學(xué)模型和機(jī)械臂末端執(zhí)行器到相機(jī)的轉(zhuǎn)換矩陣確定視覺(jué)伺服的二階運(yùn)動(dòng)學(xué)模型;
10、基于所述視覺(jué)伺服二階運(yùn)動(dòng)學(xué)模型和機(jī)械臂動(dòng)力學(xué)模型確定實(shí)際接觸力和虛擬接觸力的映射關(guān)系。
11、可選的,在本技術(shù)的一個(gè)實(shí)施例中,所述基于調(diào)整機(jī)器人期望的接觸力調(diào)整所述魯棒自適應(yīng)虛擬阻尼系數(shù),并確定基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù)包括:
12、實(shí)時(shí)預(yù)測(cè)機(jī)器人與人類協(xié)作時(shí)所需的牽引力,確定調(diào)整機(jī)器人期望的接觸力;
13、基于所述調(diào)整機(jī)器人期望的接觸力和魯棒自適應(yīng)虛擬阻尼系數(shù)確定期望虛擬導(dǎo)納參數(shù);
14、基于所述期望虛擬導(dǎo)納參數(shù)和魯棒自適應(yīng)虛擬阻尼系數(shù)確定基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù)。
15、可選的,在本技術(shù)的一個(gè)實(shí)施例中,所述確定調(diào)整機(jī)器人期望的接觸力包括:
16、比較機(jī)器人末端執(zhí)行器的實(shí)際運(yùn)動(dòng)軌跡與特征點(diǎn)的虛擬運(yùn)動(dòng)軌跡,計(jì)算軌跡曲率信息;
17、基于所述曲率信息計(jì)算調(diào)整機(jī)器人期望的接觸力。
18、可選的,在本技術(shù)的一個(gè)實(shí)施例中,所述基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù)為:
19、
20、其中,dvs為基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù),d1為基于直接意圖的魯棒自適應(yīng)虛擬阻尼系數(shù),dexpected為期望虛擬導(dǎo)納參數(shù)。
21、可選的,在本技術(shù)的一個(gè)實(shí)施例中,所述特征空間下基于人類意圖的魯棒自適應(yīng)變導(dǎo)納控制定義為:
22、
23、其中,mvs為特征空間下的虛擬質(zhì)量系數(shù),dvs為基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù),kvs為特征空間下的自適應(yīng)剛度系數(shù);evs為特征點(diǎn)誤差;為特征點(diǎn)誤差的加速度;為特征點(diǎn)誤差的速度;sd為初始設(shè)定的期望特征點(diǎn)位置,sω為受到外部接觸力所移動(dòng)的特征點(diǎn)位置,fsext為特征空間下的虛擬接觸力。
24、可選的,在本技術(shù)的一個(gè)實(shí)施例中,所述機(jī)器人圖像視覺(jué)伺服控制律定義為:
25、
26、其中,vc為相機(jī)的運(yùn)動(dòng)速度,λ為控制器增益,為圖像交互矩陣的偽逆矩陣,ead為實(shí)時(shí)圖像特征點(diǎn)和期望特征點(diǎn)的誤差,為速度特征點(diǎn),sω為受到外部接觸力所移動(dòng)的特征點(diǎn)位置,sd為初始設(shè)定的期望特征點(diǎn)位置。
27、第二方面,本技術(shù)還提供了特征空間下的基于不同意圖的魯棒自適應(yīng)變導(dǎo)納控制裝置。所述裝置包括:
28、映射關(guān)系確定模塊,用于采用機(jī)械臂運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型確定實(shí)際接觸力和虛擬接觸力的映射關(guān)系;
29、魯棒自適應(yīng)阻尼系數(shù)和自適應(yīng)剛度系數(shù)確定模塊,用于基于所述實(shí)際接觸力變化確定自適應(yīng)剛度系數(shù),基于特征點(diǎn)虛擬運(yùn)動(dòng)速度確定基于直接意圖的魯棒自適應(yīng)虛擬阻尼系數(shù);
30、基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù)確定模塊,用于基于調(diào)整機(jī)器人期望的接觸力調(diào)整所述魯棒自適應(yīng)虛擬阻尼系數(shù),并確定基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù);
31、導(dǎo)納控制確定模塊,用于基于所述映射關(guān)系、自適應(yīng)剛度系數(shù)和導(dǎo)納控制虛擬阻尼系數(shù)確定特征空間下基于人類意圖的魯棒自適應(yīng)變導(dǎo)納控制;
32、機(jī)械臂運(yùn)動(dòng)控制模塊,用于基于實(shí)時(shí)圖像特征點(diǎn)和期望特征點(diǎn)確定機(jī)器人圖像視覺(jué)伺服控制律,獲取機(jī)械臂實(shí)時(shí)關(guān)節(jié)速度,控制機(jī)械臂運(yùn)動(dòng)。
33、第三方面,本技術(shù)還提供了一種計(jì)算機(jī)設(shè)備。所述計(jì)算機(jī)設(shè)備包括存儲(chǔ)器和處理器,所述存儲(chǔ)器存儲(chǔ)有計(jì)算機(jī)程序,所述處理器執(zhí)行上述各個(gè)實(shí)施例所述方法的步驟。
34、第四方面,本技術(shù)還提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)。所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其上存儲(chǔ)有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述各個(gè)實(shí)施例所述方法的步驟。
35、上述特征空間下的基于不同意圖的魯棒自適應(yīng)變導(dǎo)納控制方法,首先,采用機(jī)械臂運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型確定實(shí)際接觸力和虛擬接觸力的映射關(guān)系;之后,基于所述實(shí)際接觸力變化確定自適應(yīng)剛度系數(shù),基于特征點(diǎn)虛擬運(yùn)動(dòng)速度確定基于直接意圖的魯棒自適應(yīng)虛擬阻尼系數(shù);之后,基于調(diào)整機(jī)器人期望的接觸力調(diào)整所述魯棒自適應(yīng)虛擬阻尼系數(shù),并確定基于直接與間接意圖的導(dǎo)納控制虛擬阻尼系數(shù);之后,基于所述映射關(guān)系、自適應(yīng)剛度系數(shù)和導(dǎo)納控制虛擬阻尼系數(shù)確定特征空間下基于人類意圖的魯棒自適應(yīng)變導(dǎo)納控制;最后,基于實(shí)時(shí)圖像特征點(diǎn)和期望特征點(diǎn)確定機(jī)器人圖像視覺(jué)伺服控制律,獲取機(jī)械臂實(shí)時(shí)關(guān)節(jié)速度,控制機(jī)械臂運(yùn)動(dòng)。在人類直接意圖層面,通過(guò)分析特征點(diǎn)的虛擬速度并利用stf的特性,在特征空間中設(shè)計(jì)了一種自適應(yīng)虛擬阻尼系數(shù)。同時(shí),為確保機(jī)械臂在視覺(jué)伺服過(guò)程中的穩(wěn)定收斂,設(shè)計(jì)了一種根據(jù)接觸力變化的自適應(yīng)調(diào)整的虛擬剛度系數(shù)。這些策略確保了在人機(jī)協(xié)同交互過(guò)程中的柔順性、魯棒性和穩(wěn)定性。在人類間接意圖層面,基于stf虛擬阻尼系數(shù),設(shè)計(jì)了一種基于曲率的力引導(dǎo)方法。該方法通過(guò)比較機(jī)器人末端執(zhí)行器的實(shí)際運(yùn)動(dòng)軌跡與特征點(diǎn)的虛擬運(yùn)動(dòng)軌跡,并利用曲率信息計(jì)算機(jī)器人所需的接觸力。通過(guò)這一策略,機(jī)器人能夠精確地跟隨并引導(dǎo)人類的力,從而實(shí)現(xiàn)更平滑、更穩(wěn)定的運(yùn)動(dòng),并確保在復(fù)雜環(huán)境下的魯棒性和柔順性。通過(guò)比較機(jī)器人末端執(zhí)行器的實(shí)際運(yùn)動(dòng)軌跡與特征點(diǎn)的虛擬運(yùn)動(dòng)軌跡,本發(fā)明成功地將笛卡爾空間中的間接意圖曲率模型映射到特征空間,實(shí)現(xiàn)了視覺(jué)人機(jī)協(xié)同過(guò)程中的更精確力引導(dǎo),能夠有效協(xié)調(diào)機(jī)器人與人類之間的互動(dòng)。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!