磁吸底座和焊接機器人的制作方法
本發明涉及吸附裝置領域,具體涉及一種磁吸底座和焊接機器人。
背景技術:
1、焊接機器人是用于進行焊接作業的工業機器人,用于在焊接工人難以進入和操作的空間內進行焊接作業,為了確保焊接機器人作業時的穩定性,焊接機器人設有永磁體以吸附固定。但是由于永磁體吸力強,因此焊接機器人放置時難以對準焊縫且位置調整困難,同時將焊接機器人取下時也很困難。
技術實現思路
1、本發明旨在至少在一定程度上解決相關技術中的技術問題之一。為此,本發明的實施例提出一種磁吸底座,該磁吸底座能夠通過轉動磁體控制磁力的啟閉,便于將磁吸底座從工作面上拆裝,以及調節磁吸底座在工作面上的位置。
2、本發明的實施例還提出一種焊接機器人。
3、本發明實施例的磁吸底座包括:
4、底座本體;
5、磁體,所述磁體與所述底座本體相連,并相對于所述底座本體可繞第一方向轉動,所述磁體具有沿第二方向排布的正極和負極,所述第二方向正交于所述第一方向;
6、導磁體和非導磁體,所述導磁體和所述非導磁體均與所述底座相連,至少兩個所述導磁體和至少兩個所述非導磁體沿所述磁體的周向一一間隔排布,并環繞在所述磁體的外周。
7、本發明實施例的磁吸底座在底座本體設有磁體、導磁體和非導磁體,磁體在轉動的過程中具有開啟位置和關閉位置,在開啟位置,磁體的正極和負極分別與對應的導磁體沿第二方向相對排布,此時磁體的磁力線經過導磁體形成閉合回路,導磁體具有磁力并能夠吸附在工作面上,從而使磁吸底座固定在工作面上,在關閉位置,磁體的正極和負極分別與對應的非導磁體沿第二方向相對排布,此時非導磁體將磁體的磁力線分割,導磁體不具有磁力,磁吸底座在工作面上進行移動或脫離工作面,因此本發明實施例的磁吸底座能夠控制磁力的啟閉,便于將磁吸底座從工作面上拆裝,以及調節磁吸底座在工作面上的位置。
8、在一些實施例中,所述磁體具有沿所述第一方向相對設置的第一連接端和自由端,所述第一連接端連接所述底座本體;
9、所述導磁體具有沿所述第一方向相對設置的第二連接端和抵接端,所述第二連接端連接所述底座本體;
10、所述自由端沿所述第一方向的端面位于所述底座本體與所述抵接端沿所述第一方向的端面之間。
11、在一些實施例中,在至少兩個所述導磁體中,任意一個所述導磁體均與其他一個所述導磁體沿所述第二方向間隔排布;
12、在至少兩個所述非導磁體中,任意一個所述非導磁體均與其他一個所述非導磁體沿所述第二方向間隔排布。
13、在一些實施例中,所述磁吸底座還包括轉動座,所述底座本體設有貫穿所述底座本體的安裝孔,所述轉動座嵌設或穿設在所述安裝孔內,并于所述磁體相連,所述轉動座可受驅動地相對于所述底座本體繞所述第一方向轉動,以帶動所述磁體繞所述第一方向轉動。
14、在一些實施例中,所述磁吸底座還包括驅動件,所述驅動件與所述轉動座直接相連,或者,所述驅動件設于所述底座本體,并于所述轉動座間接相連,所述驅動件用于驅動所述轉動座相對于所述底座本體繞所述第一方向轉動。
15、在一些實施例中,所述磁吸底座還包括拉繩和安裝件,所述安裝件設于所述轉動座,所述拉繩與所述安裝件相連,從而與所述轉動座相連,或者,所述拉繩夾設在所述安裝件和所述轉動座之間,從而與所述轉動座相連;
16、所述拉繩與所述驅動件相連,以在所述驅動件的驅動下拉動所述轉動座相對于所述底座本體繞所述第一方向轉動。
17、在一些實施例中,所述轉動座和所述磁體為一一對應連接的多個,每個所述磁體的外周均設有對應的所述導磁體和對應的所述非導磁體,多個所述轉動座呈環形間隔排布在所述底座本體上,所述拉繩呈環形排布并連接所述驅動件;
18、所述驅動件設于所述底座本體,每個所述轉動座均設有所述安裝件,以使所述拉繩依次連接多個所述轉動座,從而所述驅動件能夠同時驅動多個所述轉動座轉動;或者
19、所述驅動件設于其中一個所述轉動座,其余所述轉動座均設有所述安裝件,以使所述拉繩依次連接其余所述轉動座,從而所述驅動件能夠同時驅動多個所述轉動座轉動。
20、在一些實施例中,所述轉動座的外周面設有安裝槽,所述安裝槽沿所述轉動座的周向延伸,用于嵌設所述拉繩,所述安裝件伸入所述安裝槽,以將所述拉繩夾設在所述安裝件和所述安裝槽的槽底面之間。
21、在一些實施例中,所述驅動件為轉動把手,所述轉動把手包括相連的轉軸和握持部,所述轉軸沿所述第一方向設置,并設于所述底座本體或者設于其中一個所述轉動座,所述轉軸設有至少兩個連接孔,其中兩個所述連接孔在所述轉軸的周向上的位置相同,并沿所述轉軸的軸向依次設置,用于一一對應的連接所述拉繩的兩端。
22、本發明實施例的焊接機器人包括:
23、磁吸底座,所述磁吸底座為上述任一項實施例所述的磁吸底座。
24、本發明實施例的焊接機器人具有本發明實施例的磁吸底座,因此便于將焊接機器人從工作面上拆裝,以及調節焊接機器人在工作面上的位置,確保焊接機器人的焊接作業效果。
技術特征:
1.一種磁吸底座,其特征在于,包括:
2.根據權利要求1所述的磁吸底座,其特征在于,所述磁體(2)具有沿所述第一方向相對設置的第一連接端和自由端(21),所述第一連接端連接所述底座本體(1);
3.根據權利要求1所述的磁吸底座,其特征在于,在至少兩個所述導磁體(3)中,任意一個所述導磁體(3)均與其他一個所述導磁體(3)沿所述第二方向間隔排布;
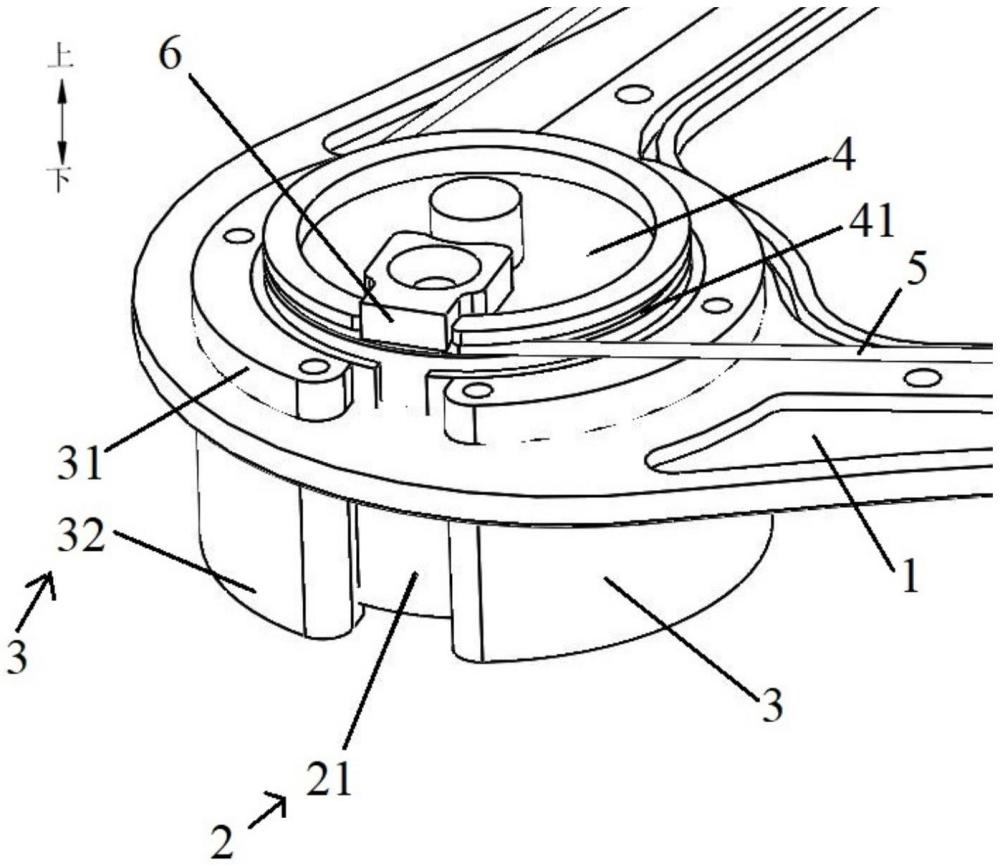
4.根據權利要求1-3中任一項所述的磁吸底座,其特征在于,還包括轉動座(4),所述底座本體(1)設有貫穿所述底座本體(1)的安裝孔,所述轉動座(4)嵌設或穿設在所述安裝孔內,并于所述磁體(2)相連,所述轉動座(4)可受驅動地相對于所述底座本體(1)繞所述第一方向轉動,以帶動所述磁體(2)繞所述第一方向轉動。
5.根據權利要求4所述的磁吸底座,其特征在于,還包括驅動件(7),所述驅動件(7)與所述轉動座(4)直接相連,或者,所述驅動件(7)設于所述底座本體(1),并于所述轉動座(4)間接相連,所述驅動件(7)用于驅動所述轉動座(4)相對于所述底座本體(1)繞所述第一方向轉動。
6.根據權利要求5所述的磁吸底座,其特征在于,還包括拉繩(5)和安裝件(6),所述安裝件(6)設于所述轉動座(4),所述拉繩(5)與所述安裝件(6)相連,從而與所述轉動座(4)相連,或者,所述拉繩(5)夾設在所述安裝件(6)和所述轉動座(4)之間,從而與所述轉動座(4)相連;
7.根據權利要求6所述的磁吸底座,其特征在于,所述轉動座(4)和所述磁體(2)為一一對應連接的多個,每個所述磁體(2)的外周均設有對應的所述導磁體(3)和對應的所述非導磁體,多個所述轉動座(4)呈環形間隔排布在所述底座本體(1)上,所述拉繩(5)呈環形排布并連接所述驅動件(7);
8.根據權利要求6所述的磁吸底座,其特征在于,所述轉動座(4)的外周面設有安裝槽(41),所述安裝槽(41)沿所述轉動座(4)的周向延伸,用于嵌設所述拉繩(5),所述安裝件(6)伸入所述安裝槽(41),以將所述拉繩(5)夾設在所述安裝件(6)和所述安裝槽(41)的槽底面之間。
9.根據權利要求7所述的磁吸底座,其特征在于,所述驅動件(7)為轉動把手,所述轉動把手包括相連的轉軸(71)和握持部(72),所述轉軸(71)沿所述第一方向設置,并設于所述底座本體(1)或者設于其中一個所述轉動座(4),所述轉軸(71)設有至少兩個連接孔(73),其中兩個所述連接孔(73)在所述轉軸(71)的周向上的位置相同,并沿所述轉軸(71)的軸向依次設置,用于一一對應的連接所述拉繩(5)的兩端。
10.一種焊接機器人,其特征在于,包括:
技術總結
本發明提供一種磁吸底座和焊接機器人,所述磁吸底座包括底座本體、磁體、導磁體和非導磁體,磁體與底座本體相連,并相對于底座本體可繞第一方向轉動,磁體具有沿第二方向排布的正極和負極,第二方向正交于第一方向,導磁體和非導磁體均與底座相連,至少兩個導磁體和至少兩個非導磁體沿磁體的周向一一間隔排布,并環繞在磁體的外周。本發明的磁吸底座能夠通過轉動磁體控制磁力的啟閉,便于將磁吸底座從工作面上拆裝,以及調節磁吸底座在工作面上的位置。
技術研發人員:徐超,鄧志偉,喬忠良
受保護的技術使用者:北京小雨智造科技有限公司
技術研發日:
技術公布日:2025/4/6
- 還沒有人留言評論。精彩留言會獲得點贊!