一種裝配式建筑器具的輔助安裝設(shè)備及人機(jī)協(xié)同安裝方法
本發(fā)明涉及裝配式建筑器具安裝的,具體而言,涉及一種裝配式建筑器具的輔助安裝設(shè)備及人機(jī)協(xié)同安裝方法。
背景技術(shù):
1、隨著科技的進(jìn)步以及人們需求愈加多樣,裝配式衛(wèi)生間、裝配式廚房等裝配式建筑不斷涌現(xiàn)出來(lái)。制造裝配式建筑時(shí),通常先將墻體預(yù)制好或者先將墻板組裝好,然后再向其內(nèi)安裝熱水器、馬桶等衛(wèi)浴用具或者油煙機(jī)等廚具。
2、現(xiàn)有技術(shù)中,向裝配式建筑內(nèi)安裝器具時(shí),通常幾個(gè)安裝人員合作,一起搬運(yùn)器具、校準(zhǔn)位置等,不僅工作量大、安裝效率低,而且安裝精度也低。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的第一個(gè)目的在于提供一種裝配式建筑器具的輔助安裝設(shè)備,以解決現(xiàn)有技術(shù)中存在的裝配式建筑的器具安裝效率低、精度低的技術(shù)問(wèn)題。
2、本發(fā)明提供的裝配式建筑器具的輔助安裝設(shè)備,用于輔助安裝人員將待安裝器具安裝至其實(shí)際目標(biāo)位置;
3、所述輔助安裝設(shè)備包括機(jī)器人和視覺(jué)裝置,所述機(jī)器人用于輔助安裝人員搬運(yùn)所述待安裝器具;所述視覺(jué)裝置用于采集所述待安裝器具的實(shí)際目標(biāo)位置及其周?chē)A(yù)設(shè)范圍內(nèi)的特征;
4、所述輔助安裝設(shè)備還包括顯示裝置,所述顯示裝置與所述視覺(jué)裝置連接,用于顯示所述視覺(jué)裝置采集的圖像。
5、進(jìn)一步地,所述視覺(jué)裝置和所述顯示裝置均與所述機(jī)器人的控制器連接,所述控制器能夠獲取所述視覺(jué)裝置采集的圖像、識(shí)別所述圖像中所述待安裝器具及其實(shí)際目標(biāo)位置、計(jì)算所述待安裝器具與其實(shí)際目標(biāo)位置的距離,并將所述距離傳送至所述顯示裝置。
6、進(jìn)一步地,所述顯示裝置設(shè)置于所述機(jī)器人的機(jī)械臂。
7、進(jìn)一步地,所述機(jī)器人的機(jī)械臂設(shè)置有位移傳感器和角度傳感器,所述位移傳感器和所述角度傳感器均與所述控制器連接,所述位移傳感器和所述角度傳感器用于檢測(cè)所述機(jī)械臂的實(shí)際位姿,所述控制器能夠計(jì)算所述機(jī)械臂的實(shí)際位姿與其目標(biāo)位姿的差距,并將所述差距傳送至所述顯示裝置。
8、進(jìn)一步地,所述機(jī)器人的機(jī)械臂的末端設(shè)置有連接裝置,所述連接裝置能夠與所述待安裝器具的運(yùn)輸工裝連接。
9、本發(fā)明提供的裝配式建筑器具的輔助安裝設(shè)備,能夠產(chǎn)生以下有益效果:
10、本發(fā)明提供的裝配式建筑器具的輔助安裝設(shè)備中,機(jī)器人能夠輔助安裝人員搬運(yùn)待安裝器具,從而能夠極大地節(jié)省安裝人員的體力,同時(shí)提高安裝效率;而且,在將待安裝器具搬運(yùn)至其出現(xiàn)在顯示裝置的顯示界面后,安裝人員便可以通過(guò)觀(guān)察顯示界面而將待安裝器具移動(dòng)至其實(shí)際目標(biāo)位置,并將待安裝器具固定至其實(shí)際目標(biāo)位置,即,通過(guò)設(shè)置視覺(jué)裝置和顯示裝置,安裝人員能夠既輕松方便又快速準(zhǔn)確地將待安裝器具移動(dòng)至其實(shí)際目標(biāo)位置,最終完成待安裝器具的準(zhǔn)確安裝。
11、總之,本發(fā)明提供的裝配式建筑器具的輔助安裝設(shè)備,安裝人員使用其進(jìn)行器具安裝時(shí),能夠?qū)崿F(xiàn)人機(jī)協(xié)同,節(jié)省體力、提高安裝效率的同時(shí),還能夠借助視覺(jué)裝置和顯示裝置實(shí)現(xiàn)準(zhǔn)確安裝。
12、本發(fā)明的第二個(gè)目的在于提供一種裝配式建筑器具的人機(jī)協(xié)同安裝方法,以解決現(xiàn)有技術(shù)中存在的裝配式建筑的器具安裝效率低、精度低的技術(shù)問(wèn)題。
13、本發(fā)明提供的裝配式建筑器具的人機(jī)協(xié)同安裝方法,安裝人員使用上述的裝配式建筑器具的輔助安裝設(shè)備將待安裝器具安裝至其實(shí)際目標(biāo)位置,所述人機(jī)協(xié)同安裝方法包括以下步驟:
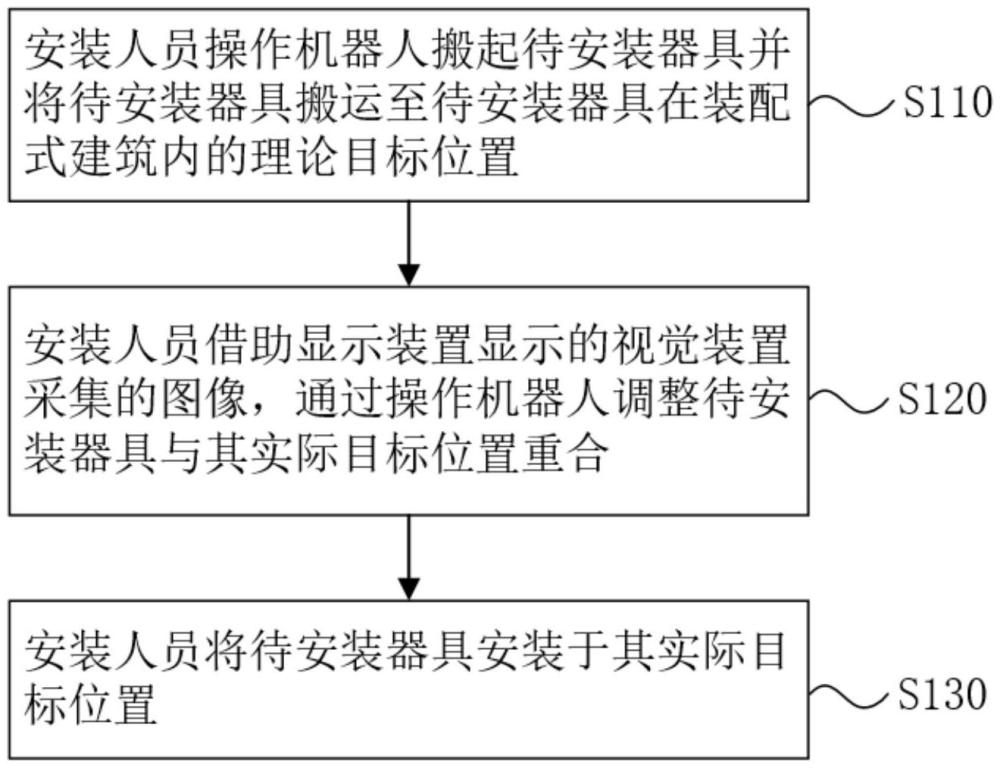
14、安裝人員操作所述機(jī)器人搬起所述待安裝器具并將所述待安裝器具搬運(yùn)至所述待安裝器具在所述裝配式建筑內(nèi)的理論目標(biāo)位置;
15、安裝人員借助所述顯示裝置顯示的所述視覺(jué)裝置采集的圖像,通過(guò)操作所述機(jī)器人調(diào)整所述待安裝器具與其實(shí)際目標(biāo)位置重合;
16、安裝人員將所述待安裝器具安裝于其實(shí)際目標(biāo)位置。
17、進(jìn)一步地,所述視覺(jué)裝置和所述顯示裝置均與所述機(jī)器人的控制器連接,所述控制器能夠獲取所述視覺(jué)裝置采集的圖像、識(shí)別所述圖像中所述待安裝器具及其實(shí)際目標(biāo)位置、計(jì)算所述待安裝器具與其實(shí)際目標(biāo)位置的距離,并將所述距離傳送至所述顯示裝置;
18、安裝人員通過(guò)操作所述機(jī)器人調(diào)整所述待安裝器具至其實(shí)際目標(biāo)位置時(shí),還借助所述顯示裝置顯示的所述距離進(jìn)行調(diào)整。
19、進(jìn)一步地,所述機(jī)器人的機(jī)械臂設(shè)置有位移傳感器和角度傳感器,所述位移傳感器和所述角度傳感器均與所述控制器連接,所述位移傳感器和所述角度傳感器用于檢測(cè)所述機(jī)械臂的實(shí)際位姿,所述控制器能夠計(jì)算所述機(jī)械臂的實(shí)際位姿與其目標(biāo)位姿的差距,并將所述差距傳送至所述顯示裝置;
20、安裝人員操作所述機(jī)器人搬運(yùn)所述待安裝器具至其理論目標(biāo)位置時(shí),借助所述顯示裝置顯示的所述差距進(jìn)行,若所述差距的各項(xiàng)數(shù)值均為零,則所述機(jī)械臂的實(shí)際位姿與其目標(biāo)位姿一致,且所述待安裝器具到達(dá)其理論目標(biāo)位置。
21、進(jìn)一步地,所述顯示裝置設(shè)置于所述機(jī)器人的機(jī)械臂。
22、進(jìn)一步地,所述機(jī)器人的機(jī)械臂的末端設(shè)置有連接裝置,所述連接裝置能夠與所述待安裝器具的運(yùn)輸工裝連接;
23、安裝人員操作所述機(jī)器人搬運(yùn)所述待安裝器具時(shí),首先將所述連接裝置與所述待安裝器具的運(yùn)輸工裝進(jìn)行連接,然后操作所述機(jī)器人攜所述待安裝器具移動(dòng)。
24、本發(fā)明提供的裝配式建筑器具的人機(jī)協(xié)同安裝方法,能夠產(chǎn)生以下有益效果:
25、本發(fā)明提供的裝配式建筑器具的人機(jī)協(xié)同安裝方法,安裝人員使用上述的輔助安裝設(shè)備將待安裝器具安裝至其實(shí)際目標(biāo)位置,首先,安裝人員操作機(jī)器人搬運(yùn)待安裝器具至待安裝器具的理論目標(biāo)位置,對(duì)待安裝器具進(jìn)行粗定位,能夠極大地節(jié)省體力,同時(shí)提高安裝效率;在將待安裝器具搬運(yùn)至其出現(xiàn)在顯示裝置的顯示界面后,安裝人員通過(guò)觀(guān)察顯示界面而將待安裝器具移動(dòng)至待安裝器具的實(shí)際目標(biāo)位置,對(duì)待安裝器具的位置進(jìn)行精確定位,最終完成待安裝器具的準(zhǔn)確安裝。而精確定位的過(guò)程,安裝人員借助視覺(jué)裝置和顯示裝置,既輕松方便又快速準(zhǔn)確。
技術(shù)特征:
1.一種裝配式建筑器具的輔助安裝設(shè)備,用于輔助安裝人員將待安裝器具安裝至其實(shí)際目標(biāo)位置,其特征在于,
2.根據(jù)權(quán)利要求1所述的裝配式建筑器具的輔助安裝設(shè)備,其特征在于,所述視覺(jué)裝置和所述顯示裝置均與所述機(jī)器人的控制器連接,所述控制器能夠獲取所述視覺(jué)裝置采集的圖像、識(shí)別所述圖像中所述待安裝器具及其實(shí)際目標(biāo)位置、計(jì)算所述待安裝器具與其實(shí)際目標(biāo)位置的距離,并將所述距離傳送至所述顯示裝置。
3.根據(jù)權(quán)利要求2所述的裝配式建筑器具的輔助安裝設(shè)備,其特征在于,所述顯示裝置設(shè)置于所述機(jī)器人的機(jī)械臂。
4.根據(jù)權(quán)利要求2所述的裝配式建筑器具的輔助安裝設(shè)備,其特征在于,所述機(jī)器人的機(jī)械臂設(shè)置有位移傳感器和角度傳感器,所述位移傳感器和所述角度傳感器均與所述控制器連接,所述位移傳感器和所述角度傳感器用于檢測(cè)所述機(jī)械臂的實(shí)際位姿,所述控制器能夠計(jì)算所述機(jī)械臂的實(shí)際位姿與其目標(biāo)位姿的差距,并將所述差距傳送至所述顯示裝置。
5.根據(jù)權(quán)利要求1-4任一項(xiàng)所述的裝配式建筑器具的輔助安裝設(shè)備,其特征在于,所述機(jī)器人的機(jī)械臂的末端設(shè)置有連接裝置,所述連接裝置能夠與所述待安裝器具的運(yùn)輸工裝連接。
6.一種裝配式建筑器具的人機(jī)協(xié)同安裝方法,其特征在于,安裝人員使用權(quán)利要求1所述的裝配式建筑器具的輔助安裝設(shè)備將待安裝器具安裝至其實(shí)際目標(biāo)位置,所述人機(jī)協(xié)同安裝方法包括以下步驟:
7.根據(jù)權(quán)利要求6所述的裝配式建筑器具的人機(jī)協(xié)同安裝方法,其特征在于,所述視覺(jué)裝置和所述顯示裝置均與所述機(jī)器人的控制器連接,所述控制器能夠獲取所述視覺(jué)裝置采集的圖像、識(shí)別所述圖像中所述待安裝器具及其實(shí)際目標(biāo)位置、計(jì)算所述待安裝器具與其實(shí)際目標(biāo)位置的距離,并將所述距離傳送至所述顯示裝置;
8.根據(jù)權(quán)利要求7所述的裝配式建筑器具的人機(jī)協(xié)同安裝方法,其特征在于,所述機(jī)器人的機(jī)械臂設(shè)置有位移傳感器和角度傳感器,所述位移傳感器和所述角度傳感器均與所述控制器連接,所述位移傳感器和所述角度傳感器用于檢測(cè)所述機(jī)械臂的實(shí)際位姿,所述控制器能夠計(jì)算所述機(jī)械臂的實(shí)際位姿與其目標(biāo)位姿的差距,并將所述差距傳送至所述顯示裝置;
9.根據(jù)權(quán)利要求7所述的裝配式建筑器具的人機(jī)協(xié)同安裝方法,其特征在于,所述顯示裝置設(shè)置于所述機(jī)器人的機(jī)械臂。
10.根據(jù)權(quán)利要求6-9任一項(xiàng)所述的裝配式建筑器具的人機(jī)協(xié)同安裝方法,其特征在于,所述機(jī)器人的機(jī)械臂的末端設(shè)置有連接裝置,所述連接裝置能夠與所述待安裝器具的運(yùn)輸工裝連接;
技術(shù)總結(jié)
本發(fā)明提供一種裝配式建筑器具的輔助安裝設(shè)備及人機(jī)協(xié)同安裝方法,涉及裝配式建筑器具安裝的技術(shù)領(lǐng)域。該輔助安裝設(shè)備包括機(jī)器人、視覺(jué)裝置和顯示裝置,機(jī)器人用于輔助安裝人員搬運(yùn)器具;視覺(jué)裝置用于采集待安裝器具及其周?chē)A(yù)設(shè)范圍內(nèi)的特征;顯示裝置與視覺(jué)裝置連接,用于顯示視覺(jué)裝置采集的圖像。該輔助安裝設(shè)備,機(jī)器人能夠輔助安裝人員搬運(yùn)待安裝器具,在將待安裝器具搬運(yùn)至其出現(xiàn)在顯示裝置的顯示界面后,安裝人員便可以通過(guò)觀(guān)察顯示界面而將待安裝器具移動(dòng)至其目標(biāo)位置,能夠?qū)崿F(xiàn)人機(jī)協(xié)同,節(jié)省體力、提高安裝效率的同時(shí),還能夠借助視覺(jué)裝置和顯示裝置實(shí)現(xiàn)準(zhǔn)確安裝。
技術(shù)研發(fā)人員:高國(guó)華,肖鵬,丁濤
受保護(hù)的技術(shù)使用者:北京工業(yè)大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/6
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!