一種組合腱繩驅動式機器人活動關節的制作方法
本發明涉及繩傳動及機器人活動關節,具體為一種組合腱繩驅動式機器人活動關節。
背景技術:
1、機器人活動關節是機器人實現各種運動的基礎,通過不同類型關節的組合運動,機器人能夠在空間中完成復雜的軌跡運動,如直線運動、曲線運動、螺旋運動等。這些運動能力使機器人能夠適應各種不同的工作場景和任務需求,如在工業生產線上進行物料搬運、零件加工和產品裝配等工作;在服務領域中為人們提供導覽、接待、清潔等服務;在科學研究中用于進行實驗操作、數據采集和樣本分析等工作。
2、傳統機器人活動關節的機械結構通常比較復雜,由多個零部件組成,這些零部件在長期的運動過程中,會受到摩擦力、沖擊力和疲勞應力等多種因素的影響,容易出現磨損、變形和斷裂等故障,從而導致關節的耐用性較差。例如,工業機器人的關節齒輪在長時間的高速運轉過程中,會因為摩擦力的作用而逐漸磨損,導致齒輪的齒形精度下降,從而影響關節的運動精度和可靠性;傳統機器人活動關節的密封性能也比較重要,如果密封不良,會導致灰塵、水分和油污等雜質進入關節內部,加速零部件的磨損和腐蝕,進一步降低關節的耐用性;此外,傳統腱繩傳動只能單一傳遞固定動能,不能調節傳遞動能的力量大小、運動加速度大小、疊加力量方向、力持續作用時間,并且需要一定的預緊力,控制方式單一,無法達到既具有柔性的緩沖、減速、加速傳動效果,也具有硬性、剛性傳動效果,控制精度差。為此,我們提出一種組合腱繩驅動式機器人活動關節。
技術實現思路
1、本發明的目的在于提供一種組合腱繩驅動式機器人活動關節,以解決上述背景技術中提出的問題。
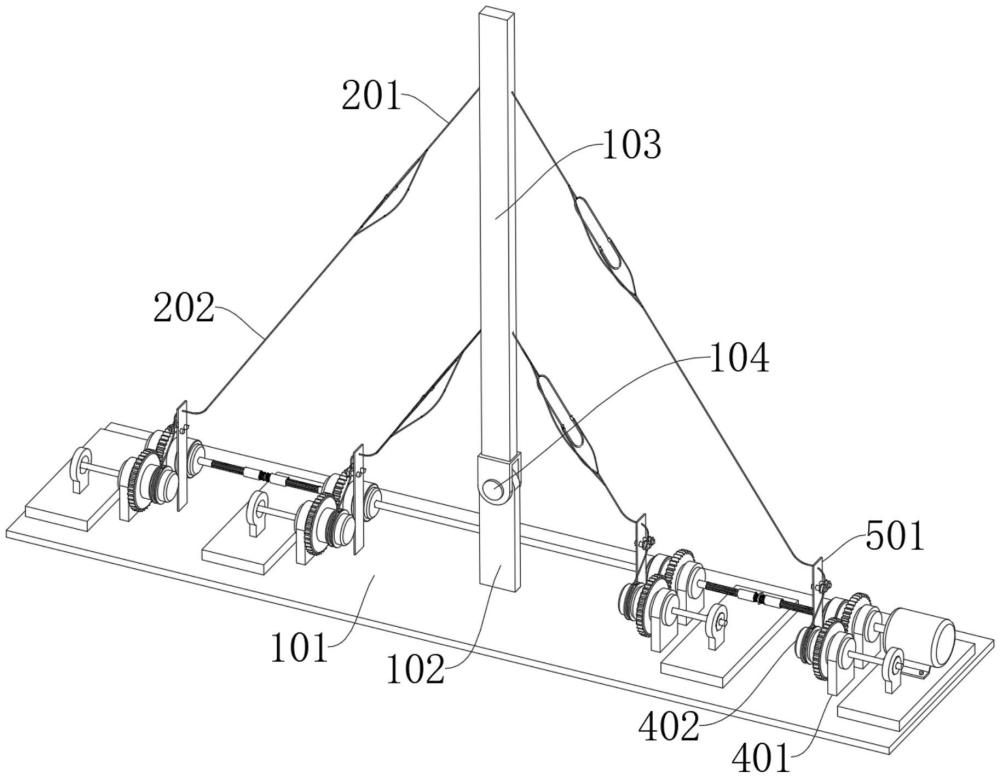
2、為實現上述目的,本發明提供如下技術方案:一種組合腱繩驅動式機器人活動關節,包括機器人底座及固定于機器人底座上端的安裝架,所述安裝架上通過銷軸可轉動連接有活動關節板,還包括:
3、設置于活動關節板兩側的多組用于對活動關節板牽引拉動使活動關節板活動的牽拉組件;
4、所述牽拉組件包括第一拉繩及第二拉繩,所述第一拉繩的一端與活動關節板的一側連接固定,所述機器人底座上設置有用于對第二拉繩收卷的收卷組件及用于對收卷組件驅動的驅動組件,所述收卷組件與驅動組件一一對應設置,所述第一拉繩與第二拉繩相對的一端設置有用于彈性拉動的彈力組件。
5、優選的,所述彈力組件包括固定于第一拉繩端部的彈力圈,所述彈力圈上固定連接有兩組對稱設置的滑套,兩組所述滑套與第二拉繩之間通過彈力繩連接固定,所述第一拉繩與第二拉繩之間設置有用于彈力限制的硬質繩,所述第一拉繩上設置有用于對滑套滑動距離識別的傳感器。
6、優選的,所述收卷組件包括固定于機器人底座上端的第一支撐架,所述第一支撐架上轉動連接有第一轉動輥,所述第一轉動輥的外側套設有收卷輪,所述第二拉繩卷設于收卷輪上,所述機器人底座上設置有用于對傳動過程中第二拉繩牽引導向的牽引組件及用于對轉動后第一轉動輥單方向限位的單向限位組件。
7、優選的,所述驅動組件包括固定于機器人底座上端的第二支撐架,所述第二支撐架上轉動連接有傳動軸,所述傳動軸上固定有第二轉動輥,所述機器人底座上安裝有用于對傳動軸驅動的驅動件,相鄰的驅動組件的傳動軸之間設置有用于動力傳輸的傳動組件,所述第二轉動輥的外側套設有齒圈,所述第一轉動輥上固定有齒輪,所述齒圈與齒輪之間相互嚙合設置,所述傳動軸上設置有用于對齒圈傳動控制的動力傳動開關控制件。
8、優選的,所述驅動件包括安裝于機器人底座上的驅動電機,所述驅動電機的輸出端與傳動軸的一端相固定。
9、優選的,所述控制件包括動力傳動開關控制件和單向制動開關控制件,所述的動力傳動開關控制件包括安裝于傳動軸(702)上的用于對齒圈(704)傳動與斷開控制的第一電磁離合器(8),所述的單向制動開關控制件包括用于第一轉動輥(402)與收卷輪(403)之間傳動與斷開控制的第二電磁離合器(12)。
10、優選的,所述傳動組件包括設置于相鄰的兩組驅動組件的傳動軸之間的第一花鍵軸,所述傳動軸的一端固定有第二花鍵軸,所述第一花鍵軸上通過伸縮組件連接有兩組對稱設置的花鍵套,兩組所述花鍵套分別與相鄰的兩組傳動軸上的第二花鍵軸相連接。
11、優選的,所述伸縮組件包括居中固定于第一花鍵軸外側的擋板,所述第一花鍵軸的外側套設有兩組彈簧,兩組所述彈簧的兩端分別與擋板及花鍵套的端部相連接。
12、優選的,所述牽引組件包括固定有機器人底座上端的固定架,所述固定架上轉動連接有兩組轉動軸,兩組所述轉動軸上固定有支撐輪,所述第二拉繩從兩組支撐輪之間穿過并相抵設置。
13、優選的,所述單向限位組件包括固定于機器人底座上端的安裝臺,所述第一轉動輥上居中固定有連接軸,所述安裝臺上固定有用于對連接軸轉動進行單方向限位的單向限位機。
14、與現有技術相比,本發明的有益效果是:
15、1.本發明通過牽拉組件與驅動組件、控制件、驅動件的相互配合,對活動關節板以韌帶式進行牽引拉動,整個組合腱繩驅動式機器人活動關節的結構相對簡單,通過各個控制件、彈力組件上彈力圈、滑套及彈力繩的相互配合,使腱繩在傳遞動能過程中,擁有進行包括增大、減小、存儲、釋放動能的控制功能,不僅能夠有效地緩沖沖擊力和疲勞應力,減少零部件的磨損和變形,從而提高關節的耐用性和可靠性,且使腱繩具有類人工肌肉功能,可調節腱繩傳遞動能的力量大小、運動加速度大小、疊加力量方向、力持續作用時間,使腱繩傳動既具有柔性的緩沖、減速、加速效果,也具有硬性、剛性傳動效果,進而增加機器人機械關節的運動控制方式;
16、2.本發明通過彈力組件形成的腱繩功能,具有存儲、釋放、放大、減少所傳遞動力的功能,使腱繩具有類人工肌肉功能,可調節傳遞動能的力量、運動加速度、疊加力量方向、力持續作用時間,且使腱繩傳動既具有柔性的緩沖、減速、加速效果,也具有硬性、剛性傳動效果;
17、3.本發明具有可變剛度的腱繩傳動結構,擬神經網絡控制模式,實現剛度與柔順性的動態調整,使機器人本身產生對力的反應動作以高機械剛度進行任意大小作用力的柔性接觸操作。
技術特征:
1.一種組合腱繩驅動式機器人活動關節,包括:
2.根據權利要求1所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述彈力組件包括固定于第一拉繩(201)端部的彈力圈(301),所述彈力圈(301)上固定連接有兩組對稱設置的滑套(302),兩組所述滑套(302)與第二拉繩(202)之間通過彈力繩(303)連接固定,所述第一拉繩(201)與第二拉繩(202)之間設置有用于彈力限制的硬質繩(304),所述第一拉繩(201)上設置有用于對滑套(302)滑動距離識別的傳感器。
3.根據權利要求2所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述收卷組件包括固定于機器人底座(101)上端的第一支撐架(401),所述第一支撐架(401)上轉動連接有第一轉動輥(402),所述第一轉動輥(402)的外側套設有收卷輪(403),所述第二拉繩(202)卷設于收卷輪(403)上,所述機器人底座(101)上設置有用于對傳動過程中第二拉繩(202)牽引導向的牽引組件及用于對轉動后第一轉動輥(402)限位的單向限位組件。
4.根據權利要求3所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述驅動組件包括固定于機器人底座(101)上端的第二支撐架(701),所述第二支撐架(701)上轉動連接有傳動軸(702),所述傳動軸(702)上固定有第二轉動輥(703),所述機器人底座(101)上安裝有用于對傳動軸(702)驅動的驅動件,相鄰的驅動組件的傳動軸(702)之間設置有用于動力傳輸的傳動組件,所述第二轉動輥(703)的外側套設有齒圈(704),所述第一轉動輥(402)上固定有齒輪(705),所述齒圈(704)與齒輪(705)之間相互嚙合設置,所述傳動軸(702)上設置有用于對齒圈(704)傳動控制的動力傳動開關控制件。
5.根據權利要求4所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述驅動件包括安裝于機器人底座(101)上的驅動電機(9),所述驅動電機(9)的輸出端與傳動軸(702)的一端相固定。
6.根據權利要求5所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述控制件包括動力傳動開關控制件和單向制動開關控制件,所述的動力傳動開關控制件包括安裝于傳動軸(702)上的用于對齒圈(704)傳動與斷開控制的第一電磁離合器(8),所述的單向制動開關控制件包括用于第一轉動輥(402)與收卷輪(403)之間傳動與斷開控制的第二電磁離合器(12)。
7.根據權利要求4所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述傳動組件包括設置于相鄰的兩組驅動組件的傳動軸(702)之間的第一花鍵軸(1001),所述傳動軸(702)的一端固定有第二花鍵軸(1003),所述第一花鍵軸(1001)上通過伸縮組件連接有兩組對稱設置的花鍵套(1002),兩組所述花鍵套(1002)分別與相鄰的兩組傳動軸(702)上的第二花鍵軸(1003)相連接。
8.根據權利要求8所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述伸縮組件包括居中固定于第一花鍵軸(1001)外側的擋板(1101),所述第一花鍵軸(1001)的外側套設有兩組彈簧(1102),兩組所述彈簧(1102)的兩端分別與擋板(1101)及花鍵套(1002)的端部相連接。
9.根據權利要求3所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述牽引組件包括固定有機器人底座(101)上端的固定架(501),所述固定架(501)上轉動連接有兩組轉動軸(502),兩組所述轉動軸(502)上固定有支撐輪(503),所述第二拉繩(202)從兩組支撐輪(503)之間穿過并相抵設置。
10.根據權利要求3所述的一種組合腱繩驅動式機器人活動關節,其特征在于:所述單向限位組件包括固定于機器人底座(101)上端的安裝臺(601),所述第一轉動輥(402)上居中固定有連接軸(602),所述安裝臺(601)上固定有用于對連接軸(602)轉動進行單方向限位的限位機(603)。
11.根據權利要求4所述的一種組合腱繩驅動式機器人活動關節,其特征在于:驅動傳動軸702可繼續延伸至多根組合腱繩,使多根組合腱繩共同使用一個動力源驅動電機9。
技術總結
本發明公開了一種組合腱繩驅動式機器人活動關節,涉及機器人活動關節技術領域。它包括安裝架、活動關節板、牽拉組件、驅動組件、控制件、驅動件等。本發明通過關節相對側各牽拉組件與驅動組件、控制件、驅動件的相互配合,對活動關節板以韌帶式進行牽引拉動,使腱繩在傳遞動能過程中,擁有進行包括增大、減小、存儲、釋放動能的控制功能,不僅能夠有效地緩沖沖擊力和疲勞應力,且有類人工肌肉功能,可調節腱繩傳遞動能的力量大小、運動加速度大小、疊加力量方向、力持續作用時間,使傳動既具有柔性的緩沖、減速、加速效果,也具有硬性、剛性傳動效果,進而增加機器人機械關節的運動控制方式。
技術研發人員:陳為華,韓立香
受保護的技術使用者:山東機張力機械科技有限公司
技術研發日:
技術公布日:2025/4/6
- 還沒有人留言評論。精彩留言會獲得點贊!