一種焊接任務執行方法、裝置、設備及存儲介質
本發明涉及數據處理,特別涉及一種焊接任務執行方法、裝置、設備及存儲介質。
背景技術:
1、針對制造環境(汽車制造、航天航空、大型鋼結構、精密設備組裝)中焊接任務,預先將焊接任務下發給機器人,由機器人執行焊接,并反饋相應的焊接結果,即焊接點的位置。而在確定焊接點位置的過程中,通常是使用單目相機采集焊縫圖像,同時使用直接法代替特征點法建立大尺度半稠密地圖;然后對圖像提取特征點進行匹配做幀間估計。這樣處理存在一定缺陷,光照條件的變化會顯著影響單目相機的性能。在低光照或強光環境下,圖像質量可能會下降,導致特征點檢測和匹配的失敗。
2、由此可見,如何精確定位焊接點的位置是本領域要解決的問題。
技術實現思路
1、有鑒于此,本發明的目的在于提供一種焊接任務執行方法、裝置、設備及存儲介質,可通過強化學習模型對機器人反饋的焊接點的位置信息進行修正,結合精確的焊接位置,可保證焊接的連續性和準確性,提高焊接效率。其具體方案如下:
2、第一方面,本申請提供了一種焊接任務執行方法,應用于控制中心,包括:
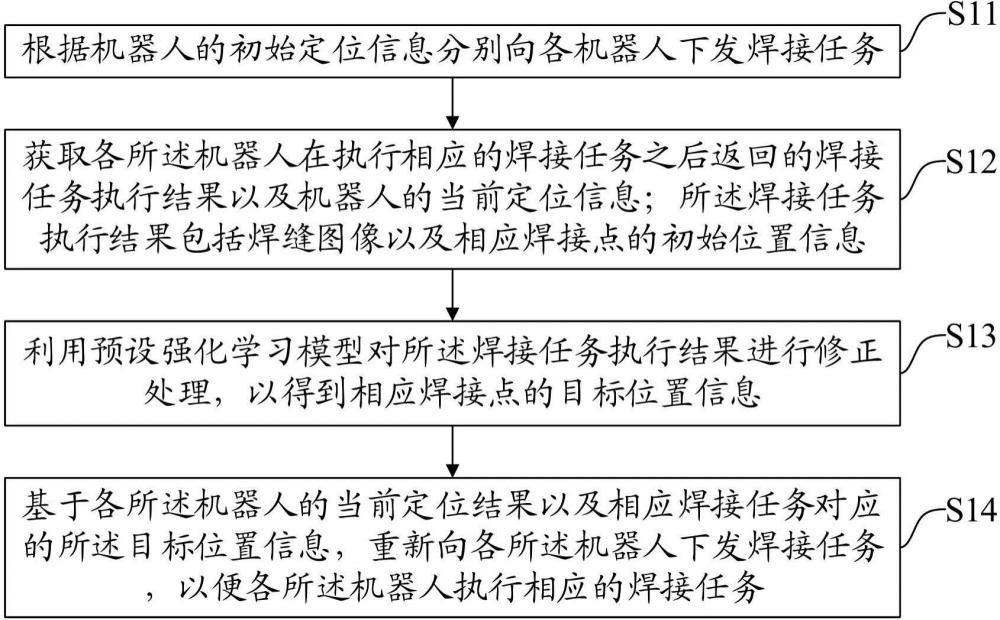
3、根據機器人的初始定位信息分別向各機器人下發焊接任務;
4、獲取各所述機器人在執行相應的焊接任務之后返回的焊接任務執行結果以及機器人的當前定位信息;所述焊接任務執行結果包括焊縫圖像以及相應焊接點的初始位置信息;
5、利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息;
6、基于各所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向各所述機器人下發焊接任務,以便各所述機器人執行相應的焊接任務。
7、可選的,所述焊縫圖像為機器人在相應的焊接任務執行完畢后,通過激光器在焊接區域投射激光條帶,并通過視覺傳感器捕捉到的包含激光條帶的焊縫圖像。
8、可選的,所述初始位置信息為機器人基于激光三角測量方法以及所述焊縫圖像,計算得到的相應焊接點在所述視覺傳感器的坐標系中的初始位置信息;
9、其中,計算得到初始位置信息的過程,包括:
10、對所述焊縫圖像進行預處理,并從預處理后的焊縫圖像中提取激光條帶的特征點,并根據所述特征點確定激光平面與焊縫平面的交點位置;
11、通過針孔相機模型計算所述交點位置在所述視覺傳感器的三維坐標系中的初始位置信息。
12、可選的,所述利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息,包括:
13、利用預設強化學習模型的卷積層對所述焊接任務執行結果中的焊縫圖像進行特征提取,得到相應的特征向量;
14、基于所述特征向量,利用所述預設強化學習模型的強化學習網絡對所述初始位置信息進行坐標調整,得到相應焊接點的目標位置信息。
15、可選的,所述基于各所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向各所述機器人下發焊接任務,包括:
16、根據各所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新規劃得到各所述機器人對應的待執行焊接任務;
17、基于快速傅里葉變換算法將各所述待執行焊接任務分別下發至相應的機器人。
18、第二方面,本申請提供了一種焊接任務執行方法,應用于機器人,包括:
19、獲取控制中心基于機器人的初始定位信息下發的焊接任務;
20、執行所述焊接任務,得到相應的焊接任務執行結果,并將所述焊接任務執行結果以及自身的當前定位信息發送至所述控制中心,以便所述控制中心利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息;所述焊接任務執行結果包括焊縫圖像以及相應焊接點的初始位置信息;
21、獲取所述控制中心基于所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向所述機器人下發的焊接任務,并執行相應的焊接任務。
22、第三方面,本申請提供了一種焊接任務執行裝置,應用于控制中心,包括:
23、第一任務下發模塊,用于根據機器人的初始定位信息分別向各機器人下發焊接任務;
24、數據獲取模塊,用于獲取各所述機器人在執行相應的焊接任務之后返回的焊接任務執行結果以及機器人的當前定位信息;所述焊接任務執行結果包括焊縫圖像以及相應焊接點的初始位置信息;
25、修正模塊,用于利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息;
26、第二任務下發模塊,用于基于各所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向各所述機器人下發焊接任務,以便各所述機器人執行相應的焊接任務。
27、第四方面,本申請提供了一種焊接任務執行裝置,應用于機器人,包括:
28、第一任務獲取模塊,用于獲取控制中心基于機器人的初始定位信息下發的焊接任務;
29、數據發送模塊,用于執行所述焊接任務,得到相應的焊接任務執行結果,并將所述焊接任務執行結果以及自身的當前定位信息發送至所述控制中心,以便所述控制中心利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息;所述焊接任務執行結果包括焊縫圖像以及相應焊接點的初始位置信息;
30、第二任務獲取模塊,用于獲取所述控制中心基于所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向所述機器人下發的焊接任務,并執行相應的焊接任務。
31、第五方面,本申請提供了一種電子設備,包括:
32、存儲器,用于保存計算機程序;
33、處理器,用于執行所述計算機程序以實現如上述的焊接任務執行方法。
34、第六方面,本申請提供了一種計算機可讀存儲介質,用于保存計算機程序,所述計算機程序被處理器執行時實現如上述的焊接任務執行方法。
35、由此可見,本申請中,控制中心可以根據機器人的初始定位信息分別向各機器人下發焊接任務;然后獲取各所述機器人在執行相應的焊接任務之后返回的焊接任務執行結果以及機器人的當前定位信息;所述焊接任務執行結果包括焊縫圖像以及相應焊接點的初始位置信息;再利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息;之后基于各所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向各所述機器人下發焊接任務,以便各所述機器人執行相應的焊接任務。這樣一來,本申請可以同時控制多機器人協同執行焊接任務,并且通過強化學習模型對機器人反饋的焊接點的位置信息進行修正,可得到更精確的焊接位置;進一步可根據各機器人執行完的焊接任務以及機器人的位置信息重新規劃需要執行的焊接任務,并下發給各機器人執行;結合精確的焊接位置,可保證焊接的連續性和準確性,能夠提高焊接效率。
技術特征:
1.一種焊接任務執行方法,其特征在于,應用于控制中心,包括:
2.根據權利要求1所述的焊接任務執行方法,其特征在于,所述焊縫圖像為機器人在相應的焊接任務執行完畢后,通過激光器在焊接區域投射激光條帶,并通過視覺傳感器捕捉到的包含激光條帶的焊縫圖像。
3.根據權利要求2所述的焊接任務執行方法,其特征在于,所述初始位置信息為機器人基于激光三角測量方法以及所述焊縫圖像,計算得到的相應焊接點在所述視覺傳感器的坐標系中的初始位置信息;
4.根據權利要求1所述的焊接任務執行方法,其特征在于,所述利用預設強化學習模型對所述焊接任務執行結果進行修正處理,以得到相應焊接點的目標位置信息,包括:
5.根據權利要求1所述的焊接任務執行方法,其特征在于,所述基于各所述機器人的當前定位結果以及相應焊接任務對應的所述目標位置信息,重新向各所述機器人下發焊接任務,包括:
6.一種焊接任務執行方法,其特征在于,應用于機器人,包括:
7.一種焊接任務執行裝置,其特征在于,應用于控制中心,包括:
8.一種焊接任務執行裝置,其特征在于,應用于機器人,包括:
9.一種電子設備,其特征在于,包括:
10.一種計算機可讀存儲介質,其特征在于,用于保存計算機程序,所述計算機程序被處理器執行時實現如權利要求1至6任一項所述的焊接任務執行方法。
技術總結
本申請公開了一種焊接任務執行方法、裝置、設備及存儲介質,涉及數據處理技術領域,應用于控制中心,包括:根據機器人的初始定位信息分別向各機器人下發焊接任務;獲取各機器人在執行焊接任務之后返回的焊接任務執行結果以及機器人的當前定位信息;焊接任務執行結果包括焊縫圖像以及焊接點的初始位置信息;利用預設強化學習模型對焊接任務執行結果進行修正處理,得到目標位置信息;基于各機器人的當前定位結果以及相應焊接任務對應的目標位置信息,重新向各機器人下發焊接任務,以執行焊接任務。這樣一來,本申請可通過強化學習模型對機器人反饋的焊接點的位置信息進行修正,結合精確的焊接位置,可保證焊接的連續性和準確性,提高焊接效率。
技術研發人員:鄧露,戴宇,曹然,劉文堯
受保護的技術使用者:湖南大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!