基于函數逼近的定制化冗余自由度機器人標定方法及系統與流程
本發明屬于機器人標定,尤其涉及一種基于函數逼近的定制化冗余自由度機器人標定方法及系統。
背景技術:
1、工業機器人是智能制造的重要基石;在管道預制、壓力容器和建筑結構等大型高精尖制造領域的智能工廠建設中,由于管道尺寸過大、工件形狀復雜、加工粒度精嚴、成型工藝苛刻和作業環境惡劣等諸多消極因素限制,存在著一系列傳統工業機器人無法勝任的非常規制造任務;對此,往往需要對傳統工業機器人進行(如串聯、并聯等的)二次改造,得到定制化的冗余自由度機器人來滿足非常規任務對機器人可達性、高效性、精確性和穩健性的高標準要求。首當其沖地,定位精度成為制約定制化機器人實際效能提升的關鍵技術瓶頸。
2、在原理上,機器人運動控制系統通過以連桿尺寸和關節角度為主要參數的運動學模型來顯式計算工具中心點的位置和姿態;而受零件制造誤差、裝配誤差、傳動誤差和關節磨損等原因影響,默認的運動學參數與其實際值存在偏差,該偏差會傳遞到工具中心的位姿計算結果上,從而導致(絕對)定位誤差;為了提升定制化機器人絕對定位精度,可以從硬件和軟件兩個角度出發,前者需要更高精度的加工儀器和裝配技術,往往價格昂貴,不能解決磨損變形導致精度下降的問題,而后者通過高精測量工具和精心設計的算法來標定(辨識并修正)定位誤差,比第一種方法硬件成本低,且能更有效地補償由于磨損或結構變形引起的精度退化。
3、針對精度標定問題,knasinski等人于1990年發現絕對定位誤差主要由機器人運動學模型參數誤差引起;因此,機器人標定技術研發主要集中在運動學參數的誤差辨識與補償上。在多數情況下,參數校準有四個基本步驟:首先,建立以連桿尺寸和關節角度為主要參數的運動學模型,以描述關節空間到執行器空間的關系;其次,通過高精度測量設備測量機器人的實際位置;然后,根據運動學模型推導誤差模型,使用實測和理論位置間的偏差進行參數識別;最后,對將識別后的參數偏差補償到機器人運動控制系統,從而矯正定位誤差。
4、然而,發明人發現,對于普遍的定制化冗余自由度機器人,上述基于運動學參數的誤差辨識與補償具有如下缺點:由于冗余機器人多由標準六軸機器人定制化改造而來,在缺乏機器人廠商充分配合時,其運動控制系統的開放程度較低,往往需要猜測配置文件中各運動結構復雜的配置參數(如坐標系原點位置、坐標軸方向、轉角方向等),該過程極易出錯且試錯成本高;由于冗余機器人需辨識的運動學參數較多,其誤差模型往往十分復雜,參數偏差辨識算法的設計與實現難度和運算復雜度很高;在缺乏機器人廠商授權時,辨識出的參數偏差難以準確地修正到配置文件中,且試錯成本高,容易出現安全事故;未考慮由非幾何誤差源(如由自身重量和載荷引起的關節柔度誤差、齒輪傳動的間隙和熱效應等)引起的定位誤差。
技術實現思路
1、本發明為了解決上述問題,提出了一種基于函數逼近的定制化冗余自由度機器人標定方法及系統,本發明將張量環網絡機器學習工具應用于機器人(特別是定制化冗余自由度機器人)的精度標定任務,通過學習規劃位姿與位置偏差間復雜的函數關系來實現機器人定位誤差估計,既無需顯式推導機器人的運動學模型和誤差模型,又可以同時兼顧幾何和非幾何誤差源。
2、為了實現上述目的,本發明是通過如下的技術方案來實現:
3、第一方面,本發明提供了一種基于函數逼近的定制化冗余自由度機器人標定方法,包括:
4、獲取機器人的規劃位姿數據;
5、依據獲取的規劃位姿數據,以及預設的估計器,得到位置誤差的估計值;
6、根據位置誤差的估計值進行位置修訂,得到機器人規劃指令對機器人進行標定;
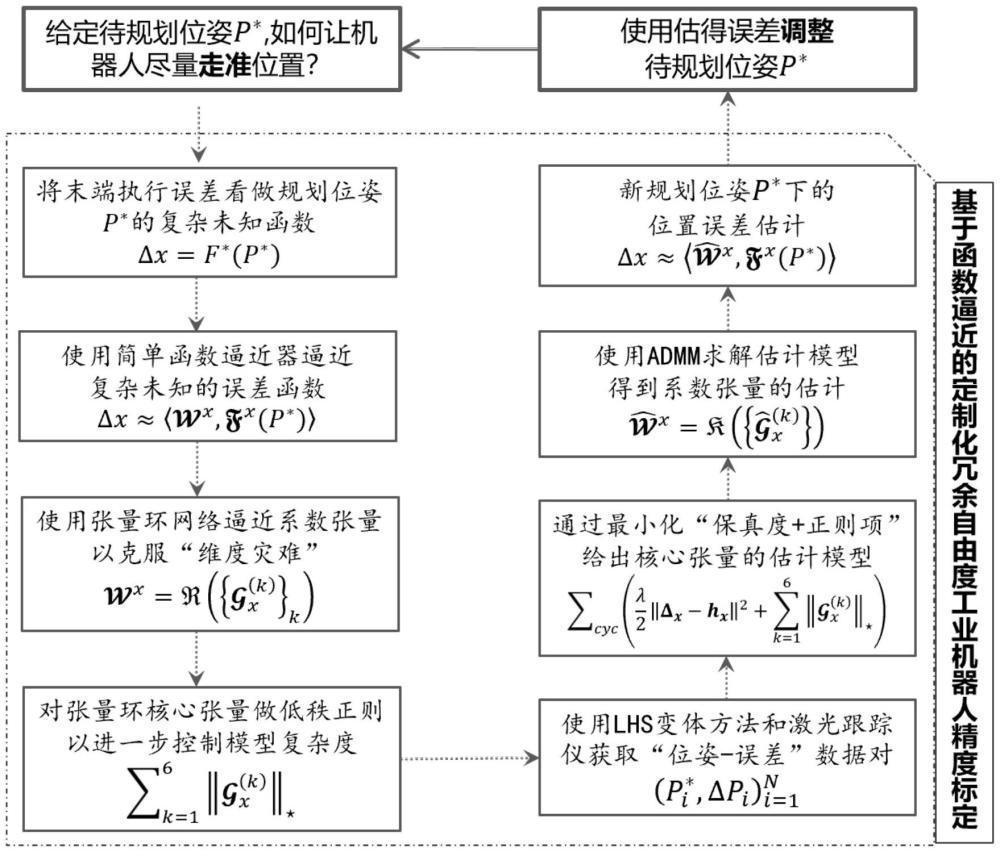
7、其中,預設的估計器的學習過程為:將位置誤差看做規劃位姿數據的非線性函數,得到誤差函數;利用張量環網絡對誤差函數做逼近,通過采樣和學習得到估計器。
8、進一步的,所述規劃位姿數據包括姿態角信息和位置信息。
9、進一步的,利用張量環網絡對誤差函數做逼近時,對系數張量進行低秩逼近,包括:根據系數張量元素個數,給出核心張量,所述核心張量為三階核心張量;對每一個三階核心張量引入張量管核范數作為低秩正則項,張量管核范數最小化引導出三階核心張量的低管秩結構。
10、進一步的,核心張量的估計模型為:
11、
12、其中,和表示核心張量;∑cyc(·)表示以x,y,z為求和指標的輪換和;λ表示正則化參數;‖·‖*作為低秩正則項;δx=(δx1,δx2,…,δxn)t記錄了n次測量中x方向上的實際誤差分量,向量;hx=(hx,1,hx,2,…,hx,n)t表示基于張量環表示的近似誤差分量;其中對任意k=1,2,…,n。
13、進一步的,利用交替方向乘子方法對所述核心張量的估計模型進行求解。
14、進一步的,依據坐標系中三個方向,分別逼近非線性函數的分量。
15、進一步的,選擇樣條曲線作為張量環網絡中的基函數。
16、第二方面,本發明還提供了一種基于函數逼近的定制化冗余自由度機器人標定系統,包括:
17、數據采集模塊,被配置為:獲取機器人的規劃位姿數據;
18、估計模塊,被配置為:依據獲取的規劃位姿數據,以及預設的估計器,得到位置誤差的估計值;
19、標定模塊,被配置為:根據位置誤差的估計值進行位置修訂,得到機器人規劃指令對機器人進行標定;
20、其中,預設的估計器的學習過程為:將位置誤差看做規劃位姿數據的非線性函數,得到誤差函數;利用張量環網絡對誤差函數做逼近,通過采樣和學習得到估計器。
21、第三方面,本發明還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現了第一方面所述的基于函數逼近的定制化冗余自由度機器人標定方法的步驟。
22、第四方面,本發明還提供了一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現了第一方面所述的基于函數逼近的定制化冗余自由度機器人標定方法的步驟。
23、與現有技術相比,本發明的有益效果為:
24、1、本發明將位置誤差看做規劃位姿數據的非線性函數,得到誤差函數;利用張量環網絡對誤差函數做逼近,通過采樣和學習得到用于進行位置誤差估計的估計器;將張量環網絡機器學習工具應用于機器人(特別是定制化冗余自由度機器人)的精度標定任務,通過學習規劃位姿與位置偏差間復雜的函數關系來實現機器人定位誤差估計,既無需顯式推導機器人的運動學模型和誤差模型,又可以同時兼顧幾何和非幾何誤差源。
25、2、本發明中,將姿態角信息作為誤差估計的輔助信息,提高了估計誤差向量的準確度;
26、3、本發明中為了解決手動選擇張量tr秩參數帶來較繁重的調參工作量的問題,對每一個三階核心張量引入張量管核范數作為低秩正則項,管核范數最小化會引導出的低管秩結構,即的張量奇異值分解式中大部分對角管道為0,從而有效限制模型復雜度。
技術特征:
1.基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,包括:
2.如權利要求1所述的基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,所述規劃位姿數據包括姿態角信息和位置信息。
3.如權利要求1所述的基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,利用張量環網絡對誤差函數做逼近時,對系數張量進行低秩逼近,包括:根據系數張量元素個數,給出核心張量,所述核心張量為三階核心張量;對每一個三階核心張量引入張量管核范數作為低秩正則項,張量管核范數最小化引導出三階核心張量的低管秩結構。
4.如權利要求3所述的基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,核心張量的估計模型為:
5.如權利要求4所述的基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,利用交替方向乘子方法對所述核心張量的估計模型進行求解。
6.如權利要求1所述的基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,依據坐標系中三個方向,分別逼近非線性函數的分量。
7.如權利要求1所述的基于函數逼近的定制化冗余自由度機器人標定方法,其特征在于,選擇樣條曲線作為張量環網絡中的基函數。
8.基于函數逼近的定制化冗余自由度機器人標定系統,其特征在于,包括:
9.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,該程序被處理器執行時實現了如權利要求1-7任一項所述的基于函數逼近的定制化冗余自由度機器人標定方法的步驟。
10.一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,其特征在于,所述處理器執行所述程序時實現了如權利要求1-7任一項所述的基于函數逼近的定制化冗余自由度機器人標定方法的步驟。
技術總結
本發明提供了一種基于函數逼近的定制化冗余自由度機器人標定方法及系統,包括:獲取機器人的規劃位姿數據;依據獲取的規劃位姿數據,以及預設的估計器,得到位置誤差的估計值;根據位置誤差的估計值進行位置修訂,得到機器人規劃指令對機器人進行標定;其中,預設的估計器的學習過程為:將位置誤差看做規劃位姿數據的非線性函數,得到誤差函數;利用張量環網絡對誤差函數做逼近,通過采樣和學習得到估計器;本發明將張量環網絡機器學習工具應用于機器人的精度標定任務,通過學習規劃位姿與位置偏差間復雜的函數關系來實現機器人定位誤差估計,既無需顯式推導機器人的運動學模型和誤差模型,又可以同時兼顧幾何和非幾何誤差源。
技術研發人員:宋相華,王銀飛,魏家斌,李成坤,姬鵬
受保護的技術使用者:中國石油化工集團有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!