一種激光光斑動態(tài)檢測快速調(diào)節(jié)裝置及其調(diào)節(jié)方法與流程
本發(fā)明涉及激光加工,具體涉及一種激光光斑動態(tài)檢測快速調(diào)節(jié)裝置及其調(diào)節(jié)方法。
背景技術(shù):
1、激光、超聲以其非接觸、寬頻帶和高效率等特點(diǎn)而成為金屬增材制造在線方法研究的熱點(diǎn),尤其在微加工領(lǐng)域,激光加工有傳統(tǒng)機(jī)械加工無法比擬的優(yōu)勢。
2、這是因?yàn)榧す夤獍呖梢院苋菀拙劢沟絬m尺寸,但是機(jī)械加工在這個尺度下很難實(shí)現(xiàn)。
3、且由激光的特性可以知道,激光聚焦光斑的性能由聚焦前的激光光斑決定。原始光斑的圓度、像散、光束質(zhì)量m2均會傳遞到聚焦光斑上。而在精細(xì)加工領(lǐng)域顯然希望激光光斑擁有接近100%的圓度,以及接近0的像散。
4、但是另一方面,在激光器長期使用的情況下,由于鏡片、晶體的老化,以及應(yīng)力的消退,諧振腔(光學(xué)諧振腔的作用是選擇頻率一定、方向一致的光作最優(yōu)先的放大,而把其他頻率和方向的光加以抑制。凡不沿諧振腔軸線運(yùn)動的光子均很快逸出腔外,與工作介質(zhì)不再接觸。激光的生成是在光學(xué)諧振腔中實(shí)現(xiàn)的,具體的:沿軸線運(yùn)動的光子將在腔內(nèi)繼續(xù)前進(jìn),并經(jīng)兩反射鏡的反射不斷往返運(yùn)行產(chǎn)生振蕩,運(yùn)行時(shí)不斷與受激粒子相遇而產(chǎn)生受激輻射,沿軸線運(yùn)行的光子將不斷增殖,在腔內(nèi)形成傳播方向一致、頻率和相位相同的強(qiáng)光束,這就是激光)不可避免的發(fā)生變化(例如,溫度的變化可能導(dǎo)致材料的熱膨脹,引起光學(xué)元件(如鏡子)的位移或形變)。即使出廠時(shí)擁有接近完美的光斑,使用一段時(shí)間后光斑仍會變化(即激光光斑的圓度降低例如降低到100%以下,同時(shí)產(chǎn)生了像散值)。這就導(dǎo)致隨著使用時(shí)間的延長,加工的形貌會發(fā)生不可逆的變化。
5、因此,解決上述現(xiàn)有技術(shù)提出的如何保證激光長期使用時(shí),光斑圓度和像散還能接近理想狀態(tài)的問題,便成為本發(fā)明所要研究解決的課題。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供了一種激光光斑動態(tài)檢測快速調(diào)節(jié)裝置及其調(diào)節(jié)方法,旨在解決上述背景技術(shù)中提出的技術(shù)問題。
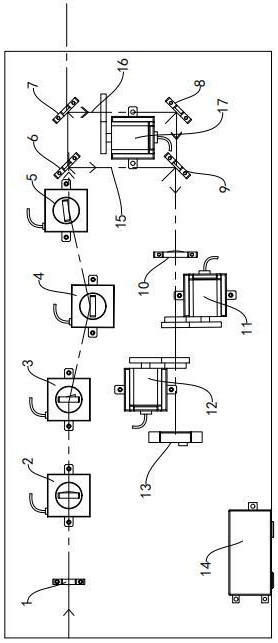
2、為達(dá)到上述目的,本發(fā)明采用的技術(shù)方案是:一種激光光斑動態(tài)檢測快速調(diào)節(jié)裝置,調(diào)節(jié)裝置包括基板以及設(shè)置在基板表面的檢測調(diào)節(jié)機(jī)構(gòu),檢測調(diào)節(jié)機(jī)構(gòu)包括負(fù)透鏡、安裝有正透鏡的正透鏡旋轉(zhuǎn)機(jī)構(gòu)、安裝有棱鏡的棱鏡旋轉(zhuǎn)機(jī)構(gòu)、第一調(diào)節(jié)反射鏡、第二調(diào)節(jié)反射鏡、第一分光鏡、第二分光鏡、第一折鏡、第二折鏡、聚焦鏡、第一平行平板、第二平行平板、ccd傳感器、信號處理盒以及攔光器;
3、沿著激光光束照射方向,負(fù)透鏡、正透鏡旋轉(zhuǎn)機(jī)構(gòu)、棱鏡旋轉(zhuǎn)機(jī)構(gòu)、第一調(diào)節(jié)反射鏡、第二調(diào)節(jié)反射鏡、第一分光鏡以及第二分光鏡依次設(shè)置;
4、其中,當(dāng)激光光束照射至第一分光鏡上時(shí),部分光線穿過第一分光鏡以形成第一穿出光線,另部分光線在第一分光鏡表面發(fā)生反射并形成第一測試光路;
5、穿過第一分光鏡的第一穿出光線照射至第二分光鏡上時(shí),部分第一穿出光線穿過第二分光鏡以構(gòu)成穿出光路,另部分第一穿出光線在第二分光鏡表面發(fā)生反射并形成第二測試光路;
6、攔光器設(shè)置在第一測試光路與第二測試光路上,用于遮擋第一測試光路或第二測試光路;
7、聚焦鏡、第一平行平板、第二平行平板和ccd傳感器沿一直線方向依次設(shè)置并構(gòu)成測試光路后段;第一平行平板和第二平行平板相對基板活動設(shè)置,第一平行平板和第二平行平板能夠分別進(jìn)入測試光路后段或避讓開;
8、第一折鏡與第一分光鏡對應(yīng)設(shè)置,將第一測試光路反射向聚焦鏡;第二折鏡與第二分光鏡對應(yīng)設(shè)置,將第二測試光路反射向聚焦鏡即測試光路后段;
9、ccd傳感器用于測量激光光束的圓度和像散;
10、信號處理盒用于將ccd傳感器測量的數(shù)據(jù)傳輸至計(jì)算機(jī)以及接收計(jì)算機(jī)傳輸?shù)闹噶睢?/p>
11、上述方案中,有關(guān)內(nèi)容的解釋如下:
12、上述方案中,基板主要是用來固定或者安放的檢測調(diào)節(jié)機(jī)構(gòu),并不局限于板材。
13、上述方案中,“光路”是一個光學(xué)術(shù)語,指的是光線從光源出發(fā),通過光學(xué)系統(tǒng)(如透鏡、鏡子等)傳播到達(dá)某個特定點(diǎn)的路徑。
14、其中,激光光束通過第一分光鏡和第二分光鏡時(shí)會分成四股,以下以第一股、第二股、第三股和穿出股進(jìn)行指代說明:
15、激光光束經(jīng)過正透鏡旋轉(zhuǎn)機(jī)構(gòu)、棱鏡旋轉(zhuǎn)機(jī)構(gòu)、第一調(diào)節(jié)反射鏡和第二調(diào)節(jié)反射鏡后會照射至第一分光鏡上,此時(shí),會由一股分為兩股。即第一股與第二股(即第一穿出光線)產(chǎn)生,第一股經(jīng)過第一分光鏡的反射,傳輸?shù)降谝徽坨R,再經(jīng)過聚焦鏡、第一平行平板、第二平行平板后,傳輸?shù)絚cd傳感器,從而形成第一測試光路。
16、第二股(即第一穿出光線)照射到第二分光鏡上,此時(shí),第二股中會由一股分為兩股,即第三股和穿出股。
17、此時(shí),穿出股穿過第二分光鏡以構(gòu)成穿出光路;
18、第三股通過第二分光鏡的反射傳輸?shù)降诙坨R上,隨后經(jīng)過第一折鏡、聚焦鏡、第一平行平板和第二平行平板后,傳輸?shù)絚cd傳感器上形成第二測試光路。
19、測試第一測試光路與第二測試光路就是指:ccd傳感器檢測沿著第一測試光路與第二測試光路傳輸而來的激光光束。
20、進(jìn)一步的技術(shù)方案,所述第一分光鏡與所述第二分光鏡均鍍有所需波長的增透膜,透射率為99.5%;
21、所述第一折鏡與所述第二折鏡均鍍有所需波長的反射膜,反射率大于99.9%。
22、上述方案中,所需波長的增透膜指根據(jù)激光光束波長選擇的增透膜,增加透過率;
23、所需波長的反射膜指根據(jù)激光光束波長選擇反射膜;增加反射率。
24、本發(fā)明還提供了一種基于激光光斑動態(tài)檢測快速調(diào)節(jié)裝置的調(diào)節(jié)方法,包括如下步驟:
25、s01、生成入射激光光束的第一測試光路和第二測試光路,并通過攔光器遮擋第二測試光路,以使ccd傳感器僅能對沿第一測試光路照射而來的激光光束進(jìn)行測量;
26、s02、切換第一平行平板與第二平行平板的位置,以獲得不經(jīng)過兩者、經(jīng)過兩者之一以及經(jīng)過兩者后的三組測量數(shù)據(jù),并根據(jù)三組測量數(shù)據(jù),獲得反射至ccd傳感器上的激光光束的初始圓度以及初始像散;
27、s03、根據(jù)獲得的初始圓度,啟動正透鏡旋轉(zhuǎn)機(jī)構(gòu),并通過調(diào)節(jié)正透鏡的傾斜度來調(diào)整圓度,同時(shí)ccd傳感器實(shí)時(shí)測量,直至測量到的圓度符合設(shè)定要求后,關(guān)閉正透鏡旋轉(zhuǎn)機(jī)構(gòu);
28、s04、再根據(jù)獲得的初始像散,啟動棱鏡旋轉(zhuǎn)機(jī)構(gòu),并通過調(diào)節(jié)棱鏡的傾斜度,來調(diào)整像散,同時(shí)ccd傳感器實(shí)時(shí)測量,直至測量到的像散符合設(shè)定要求后,關(guān)閉棱鏡旋轉(zhuǎn)機(jī)構(gòu);
29、s05、繼續(xù)通過攔光器遮擋第二測試光路,并在ccd傳感器用來檢測的光束照射平面上定義一個坐標(biāo)軸,x軸和y軸分別表示水平方向和垂直方向,再通過ccd傳感器測量激光光束經(jīng)第一折鏡反射而來所形成的第一光路聚焦光斑位置,同時(shí)根據(jù)第一光路聚焦光斑的中心點(diǎn)與坐標(biāo)軸的中心點(diǎn)位置調(diào)節(jié)第一調(diào)節(jié)反射鏡,直至第一光路聚焦光斑的中心點(diǎn)與坐標(biāo)軸的中心點(diǎn)重合;
30、s06、調(diào)節(jié)攔光器的位置,以遮擋第一測試光路,再通過ccd傳感器測量激光光束經(jīng)第二折鏡反射而來所形成的第二光路聚焦光斑位置,同時(shí)根據(jù)第二光路聚焦光斑的中心點(diǎn)與坐標(biāo)軸的中心點(diǎn)位置調(diào)節(jié)第二調(diào)節(jié)反射鏡,直至第二光路聚焦光斑的中心點(diǎn)與坐標(biāo)軸的中心點(diǎn)重合;
31、s07、在第一光路聚焦光斑的中心點(diǎn)和第二光路聚焦光斑的中心點(diǎn)均與坐標(biāo)軸的中心點(diǎn)重合后,第一測試光路和第二測試光路以同軸方式輸出。
32、上述內(nèi)容中,有關(guān)解釋如下:
33、上述方案中,第一測試光路和第二測試光路以同軸方式輸出,指的是沿著第一測試光路和第二測試光路傳輸而來的激光光束以同軸方式輸出。
34、上述方案中,第一光路聚焦光斑和第二光路聚焦光斑,指的是沿著第一測試光路和第二測試光路傳輸而來的激光光束在ccd傳感器上的測量平面上形成的光斑形狀和大小。
35、進(jìn)一步的技術(shù)方案,步驟s02包括:
36、s021、引導(dǎo)所述第一平行平板與所述第二平行平板的位置均避讓第一測試光路,ccd傳感器直接檢測照射而來的第一測試光路以測得第一組數(shù)據(jù),即為激光束腰后的光斑圓度以及像散數(shù)值;
37、在s021這個步驟中,兩個平行平板避讓開光路(即都不在光路中),ccd傳感器直接接收激光光束,記錄下激光光束的初始狀態(tài)(即激光束腰后的光斑特性)。這組數(shù)據(jù)將作為基準(zhǔn),用于后續(xù)比較;測得的光斑圓度和像散數(shù)值將反映激光光束在未經(jīng)過任何光學(xué)元件時(shí)的質(zhì)量。
38、s022、引導(dǎo)所述第一平行平板與所述第二平行平板中其中一個進(jìn)入第一測試光路中,以使激光光束穿過所述第一平行平板或所述第二平行平板后到達(dá)ccd傳感器,以測得第二組數(shù)據(jù),即為激光束腰的光斑圓度以及像散數(shù)值;
39、在s022此步驟中,將其中一個平行平板放入光路中,當(dāng)激光光束經(jīng)過這個平板后到達(dá)ccd傳感器時(shí),記錄下光斑的特性。這將提供有關(guān)激光光束在經(jīng)過一個平行平板后的圓度和像散的數(shù)值。
40、s023、引導(dǎo)所述第一平行平板與所述第二平行平板均處于第一測試光路中,以使激光光束穿過所述第一平行平板和所述第二平行平板后到達(dá)ccd傳感器,以測得第三組數(shù)據(jù),即為激光束腰前的光斑圓度以及像散數(shù)值;
41、在s023這個步驟中,兩個平行平板都在光路中。激光光束經(jīng)過這兩個平板后到達(dá)ccd傳感器,記錄下的光斑特性將反映光束在經(jīng)過兩個平行平板后的狀態(tài)。
42、s024、利用所得三組數(shù)據(jù)并應(yīng)用高斯光學(xué)的理論,以獲得激光束的詳細(xì)描述,包括束腰半徑、圓度和像散。
43、s024這一步驟是數(shù)據(jù)分析和結(jié)果提取的階段。通過匯總之前的三組數(shù)據(jù),應(yīng)用高斯光學(xué)理論(該理論適用于描述激光光束的傳播特性),可以解析出激光光束的詳細(xì)參數(shù):
44、束腰半徑:光束在其最小直徑處的寬度。
45、圓度:光束光斑的形狀對稱性,通常以光斑的長寬比來表示。
46、像散:光束在不同方向上的聚焦能力差異,反映光束質(zhì)量。
47、進(jìn)一步的技術(shù)方案,步驟s03中根據(jù)獲得的初始圓度,啟動正透鏡旋轉(zhuǎn)機(jī)構(gòu),并通過調(diào)節(jié)正透鏡的傾斜度來調(diào)整圓度,同時(shí)ccd傳感器實(shí)時(shí)測量,直至測量到的圓度符合設(shè)定要求后,關(guān)閉正透鏡旋轉(zhuǎn)機(jī)構(gòu)的具體操作步驟為:
48、s031、建立激光光束通過時(shí)的正透鏡入射角和激光光斑圓度之間的函數(shù)關(guān)系;
49、此步驟的目的是確定正透鏡入射角對激光光斑圓度的影響。這是通過建立一個數(shù)學(xué)模型或?qū)嶒?yàn)數(shù)據(jù)關(guān)系來實(shí)現(xiàn)的。
50、方法:可以通過實(shí)驗(yàn)獲得不同入射角下的光斑圓度數(shù)據(jù)。通過逐漸改變透鏡的傾斜角度,并在每個角度下使用?ccd?傳感器記錄光斑的圓度。然后,利用這些數(shù)據(jù)繪制圖表或進(jìn)行曲線擬合,找到入射角與光斑圓度之間的明確關(guān)系。
51、重要性:這個函數(shù)關(guān)系是后續(xù)調(diào)整的基礎(chǔ),幫助確定在特定入射角下,如何調(diào)整透鏡以實(shí)現(xiàn)所需的光斑圓度。
52、s032、以入射前的激光光束圓度為基準(zhǔn),并結(jié)合正透鏡入射角和激光光斑圓度之間的函數(shù)關(guān)系,調(diào)節(jié)正透鏡的傾斜角度,直至ccd傳感器檢測到激光光斑圓度符合要求時(shí)停止調(diào)節(jié)。
53、基準(zhǔn)設(shè)定:首先記錄入射前的激光光束圓度,作為參考標(biāo)準(zhǔn)。這個標(biāo)準(zhǔn)是優(yōu)化過程中的基準(zhǔn)點(diǎn)。
54、結(jié)合函數(shù)關(guān)系:根據(jù)步驟?s031中建立的入射角與光斑圓度之間的函數(shù)關(guān)系,開始調(diào)節(jié)正透鏡的傾斜角度。這一過程可能是迭代的:在每次調(diào)整傾斜角度后,通過?ccd?傳感器實(shí)時(shí)測量光斑的圓度。
55、實(shí)時(shí)反饋:利用?ccd?傳感器的實(shí)時(shí)測量,觀察光斑圓度是否接近設(shè)定的目標(biāo)值。這個實(shí)時(shí)反饋機(jī)制使調(diào)節(jié)過程變得動態(tài)和高效。
56、停止調(diào)節(jié)條件:一旦測得的光斑圓度符合預(yù)設(shè)的要求,就停止對透鏡的傾斜角度進(jìn)行調(diào)節(jié)。此時(shí),激光系統(tǒng)的光斑質(zhì)量已經(jīng)達(dá)到優(yōu)化狀態(tài)。
57、通過上述步驟,可以系統(tǒng)地優(yōu)化激光光束的質(zhì)量。s031?步驟建立了理論基礎(chǔ),使s032?步驟的調(diào)節(jié)過程有據(jù)可依。整個過程強(qiáng)調(diào)了實(shí)驗(yàn)與理論的結(jié)合,以及實(shí)時(shí)反饋在激光系統(tǒng)調(diào)節(jié)中的重要性。這樣的操作步驟有助于確保激光系統(tǒng)能夠在不同工作條件下提供高質(zhì)量的光束輸出。
58、進(jìn)一步的技術(shù)方案,步驟s031中建立激光光束通過時(shí)的正透鏡入射角和激光光斑圓度之間的函數(shù)關(guān)系的具體流程為:
59、s311、選擇固定設(shè)計(jì)的正透鏡,并獲取正透鏡的曲率半徑;
60、s312、獲取正透鏡的光線傳輸矩陣中的子午面?zhèn)鬏斁仃嚭突∈该鎮(zhèn)鬏斁仃嚕渲凶游缑鎮(zhèn)鬏斁仃嚍椋海?/p>
61、弧矢面?zhèn)鬏斁仃嚍椋海?/p>
62、s313、應(yīng)用子午面?zhèn)鬏斁仃嚭突∈该鎮(zhèn)鬏斁仃囘M(jìn)行計(jì)算,以獲得經(jīng)過傾斜透鏡變換后的激光光束子午面束腰尺寸與弧矢面束腰尺寸;其中,變換后的激光光束子午面束腰尺寸與弧矢面束腰尺寸就是正透鏡入射角θ1的函數(shù);
63、步驟s313中傳輸矩陣:在光學(xué)中,傳輸矩陣用于描述光束通過光學(xué)元件(如透鏡)的變化。子午面和弧矢面是指通過光軸的兩個垂直平面。
64、計(jì)算子午面和弧矢面束腰尺寸:通過利用子午面和弧矢面的傳輸矩陣,可以計(jì)算激光光束在經(jīng)過正透鏡后在這兩個面上的束腰尺寸。這些計(jì)算通常依賴于正透鏡入射角θ1、正透鏡的曲率半徑?r1?和?r2,以及光束的波長和折射率?n。
65、s314、根據(jù)所測量的入射前激光光斑的圓度,則可以調(diào)節(jié)正透鏡的傾斜角度,即調(diào)節(jié)正透鏡入射角θ1;
66、圓度的影響:通過在?s031?中測量的入射前激光光斑的圓度,可以判斷光束的質(zhì)量,并決定如何調(diào)整正透鏡的入射角?θ1。光斑的圓度是影響光束質(zhì)量的重要參數(shù),因此需要確保通過調(diào)節(jié)傾斜角度,使得經(jīng)過透鏡后的光斑圓度符合要求。
67、調(diào)節(jié)機(jī)制:根據(jù)之前的計(jì)算結(jié)果,調(diào)節(jié)正透鏡入射角θ1,以實(shí)現(xiàn)所需的光束特性。
68、s315、激光光束經(jīng)過正透鏡變換后,激光束腰在子午面和弧矢面保持一致,便停止調(diào)節(jié)激光圓度;
69、一致性要求:在這個步驟中,目標(biāo)是確保經(jīng)過正透鏡后的激光束腰在子午面和弧矢面保持一致性。也就是說,經(jīng)過透鏡后,激光光斑在兩個平面上的形狀應(yīng)相同,這通常意味著激光光束具有更好的質(zhì)量和聚焦能力。
70、停止條件:一旦檢測到子午面和弧矢面的束腰尺寸一致,表明光束質(zhì)量已達(dá)到優(yōu)化狀態(tài),就可以停止對正透鏡的調(diào)整。這是整個調(diào)節(jié)過程的最終目標(biāo)。
71、其中,θ1為正透鏡入射角;
72、n為已知波長的激光光束通過當(dāng)前材料的相對折射率;
73、r1為正透鏡第一面的曲率半徑,即為射入正透鏡的表面的曲率半徑;
74、r2為正透鏡第二面的曲率半徑,即為射出正透鏡的表面的曲率半徑。
75、上述方案中,選擇固定設(shè)計(jì)的正透鏡,應(yīng)該選擇薄正透鏡,此情況下近似h=0,不是薄正透鏡的情況下需要考慮透鏡的厚度,即導(dǎo)致傾斜前的數(shù)據(jù)需要考慮更多的外在因素。
76、上述方案中,n為已知波長的激光光束通過當(dāng)前材料的相對折射率;該處指的是已知波長的激光光束通過正透鏡的相對折射率。
77、進(jìn)一步的技術(shù)方案,步驟s04、再根據(jù)獲得的初始像散,啟動棱鏡旋轉(zhuǎn)機(jī)構(gòu),并通過調(diào)節(jié)棱鏡的傾斜度,來調(diào)整像散,同時(shí)ccd傳感器實(shí)時(shí)測量,直至測量到的像散符合設(shè)定要求后,關(guān)閉棱鏡旋轉(zhuǎn)機(jī)構(gòu),的具體操作步驟為;
78、s041、獲取加工成楔形的棱鏡,并引導(dǎo)光束通過所述加工成楔形的棱鏡;
79、s042、獲取該楔形棱鏡的光線傳輸矩陣中子午面?zhèn)鬏斁仃嚭突∈该鎮(zhèn)鬏斁仃嚕渲校游缑鎮(zhèn)鬏斁仃嚍椋海?/p>
80、弧矢面?zhèn)鬏斁仃嚍椋海?/p>
81、s043、引導(dǎo)激光光速通過棱鏡以及正透鏡變換后,等效變換子午面?zhèn)鬏斁仃嚍閍t=,
82、弧矢面?zhèn)鬏斁仃嚍椋?/p>
83、s044、獲取傾斜的棱鏡以及傾斜的正透鏡補(bǔ)償?shù)南裆⒅禐閐s=s3s-s3t;
84、s045、根據(jù)激光,傳輸矩陣?yán)碚摚瑢⑾裆⒅礵s=s3s-s3t換算為像散值ds和正透鏡入射角θ1與棱鏡入射角θ2的函數(shù)關(guān)系式;
85、s046、根據(jù)步驟s314中確定的正透鏡入射角θ1,以及設(shè)定要求要達(dá)到的像散獲得棱鏡入射角θ2的數(shù)值。
86、其中,,為楔形棱鏡入射角,θ2'為楔形棱鏡出射角,β為楔形棱鏡楔角,d為棱鏡內(nèi)光程,l為入射點(diǎn)到楔形棱鏡頂點(diǎn)距離;
87、s1為入射光束腰位置到傾斜透鏡的距離,s2為傾斜透鏡到棱鏡距離,s3t為變換后子午面的等效束腰到傾斜透鏡的距離,s3s為變換后弧矢面的等效束腰到傾斜透鏡的距離;
88、z1為入射光共焦參數(shù),z2為出射光共焦參數(shù);
89、n為已知波長的激光光束通過當(dāng)前材料的相對折射率;
90、α為激光光束進(jìn)入棱鏡內(nèi)的折射角;
91、α'為激光光束從棱鏡內(nèi)部入射進(jìn)另外一個面的入射角。
92、上述方案中,n為已知波長的激光光束通過當(dāng)前材料的相對折射率;該處指的是已知波長的激光光束通過棱鏡的相對折射率。
93、棱鏡指的是加工成楔形的棱鏡。
94、通過上述步驟,能夠?qū)崿F(xiàn)對激光光束像散的精確補(bǔ)償。s044?中的像散值計(jì)算為后續(xù)分析提供了必要的基礎(chǔ),s045?中的函數(shù)關(guān)系建立則為角度調(diào)節(jié)提供了理論支持,而s046?則通過具體數(shù)值計(jì)算實(shí)現(xiàn)了目標(biāo)像散的達(dá)成。整個過程強(qiáng)調(diào)了光學(xué)系統(tǒng)中不同元件之間的相互作用,以及通過合理調(diào)整光學(xué)元件的配置來優(yōu)化光束質(zhì)量的重要性。
95、進(jìn)一步的技術(shù)方案,所述設(shè)定要求要達(dá)到的像散約等于0(即背景技術(shù)中描述的接近0的像散)。
96、進(jìn)一步的技術(shù)方案,所述棱鏡入射角θ2的數(shù)值為棱鏡傾斜角度。
97、即激光光束照射的角度不好調(diào)整,故而通過調(diào)整棱鏡入射角來調(diào)整激光光束照射的角度。
98、關(guān)于本文中所使用的“第一”、“第二”等,并非特別指稱次序或順位的意思,亦非用以限定本案,其僅為了區(qū)別以相同技術(shù)用語描述的組件或操作。
99、關(guān)于本文中所使用的“連接”或“定位”,均可指二或多個組件或裝置相互直接作實(shí)體接觸,或是相互間接作實(shí)體接觸,亦可指二或多個組件或裝置相互操作或動作。
100、關(guān)于本文中所使用的“包含”、“包括”、“具有”等,均為開放性的用語,即意指包含但不限于。
101、關(guān)于本文中所使用的用詞(terms),除有特別注明外,通常具有每個用詞使用在此領(lǐng)域中、在本案內(nèi)容中與特殊內(nèi)容中的平常意義。某些用以描述本案的用詞將于下或在此說明書的別處討論,以提供本領(lǐng)域技術(shù)人員在有關(guān)本案描述上額外的引導(dǎo)。
102、關(guān)于本文中所使用的“前”、“后”、“上”、“下”、“左”、“右”等,均為方向性用詞,在本案中僅為說明各結(jié)構(gòu)之間位置關(guān)系,并非用以限定本案保護(hù)方案及實(shí)際實(shí)施時(shí)的具體方向。
103、本發(fā)明的工作原理及優(yōu)點(diǎn)如下:
104、本發(fā)明中通過正透鏡和棱鏡的設(shè)置,可以校正像散、圓度,即先校正圓度,再校正像散,從而保證激光長期使用時(shí),光斑圓度和像散還能接近理想狀態(tài)。
105、本發(fā)明中通過第一調(diào)節(jié)反射鏡與第二調(diào)節(jié)反射鏡來實(shí)時(shí)動態(tài)光路矯正,監(jiān)測過程不影響實(shí)際加工過程。
106、本發(fā)明中通過攔光器以及ccd傳感器的配合,可以快速光束質(zhì)量分析。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!