一種高效載具加速傳輸設備的制作方法
本發明屬于自動化傳輸處理,尤其涉及一種高效載具加速傳輸設備。
背景技術:
1、載具傳輸設備是用于在自動化生產線或物流系統中實現載具如托盤、貨物等快速、精準移動的機械設備。
2、然而傳統技術存在一些問題:隨著現代交通和物流行業對加速和傳輸效率的要求日益提高,傳統的內燃機驅動和電動機驅動已經無法滿足當前的高效、環保要求,存在能耗高的問題。
技術實現思路
1、針對現有技術存在的問題,本發明提供了一種高效載具加速傳輸設備,解決了傳統的內燃機驅動和電動機驅動已經無法滿足當前的高效、環保要求,存在能耗高的問題。
2、本發明是這樣實現的,一種高效載具加速傳輸設備,包括輸送組件,還包括用于儲存螺釘和輸送螺釘的自動送釘組件,所述輸送組件包括線體、rfid和電機,其中,所述電機固定安裝所述線體,所述線體受所述電機驅動做加速傳輸動作,其中,所述rfid固定在所述線體一側,用于識別和追蹤載具的信息,所述自動送釘組件做自動化傳輸動作。
3、作為本發明優選的,所述還包括支腿、防護盒、控制柜、跨線梯、阻擋缸和阻擋傳感器,其中所述線體包括線體支架和線體輥子,所述線體速度為二十二米每分鐘。
4、作為本發明優選的,所述支腿通過螺栓與線體相連,用于支撐線體并保持其穩定。
5、作為本發明優選的,所述電機采用螺栓與線體固定連接,所述控制柜控制電機做啟停動作,所述控制柜固定在所述線體一側。
6、作為本發明優選的,所述電機包括電機盒和電機盒蓋,所述電機用于驅動載具在線體上加速移動,電機為伺服電機,控制載具做加速和減速移動,所述防護盒固定在所述電機外部。
7、作為本發明優選的,所述跨線梯固定在所述線體上方,用于人員跨越線體進行維護和操作,所述跨線梯采用防滑設計。
8、作為本發明優選的,所述阻擋缸固定在所述線體一側,用于阻擋載具的移動。
9、作為本發明優選的,所述阻擋傳感器與線體固定連接,用于檢測載具的位置并控制阻擋缸的動作。
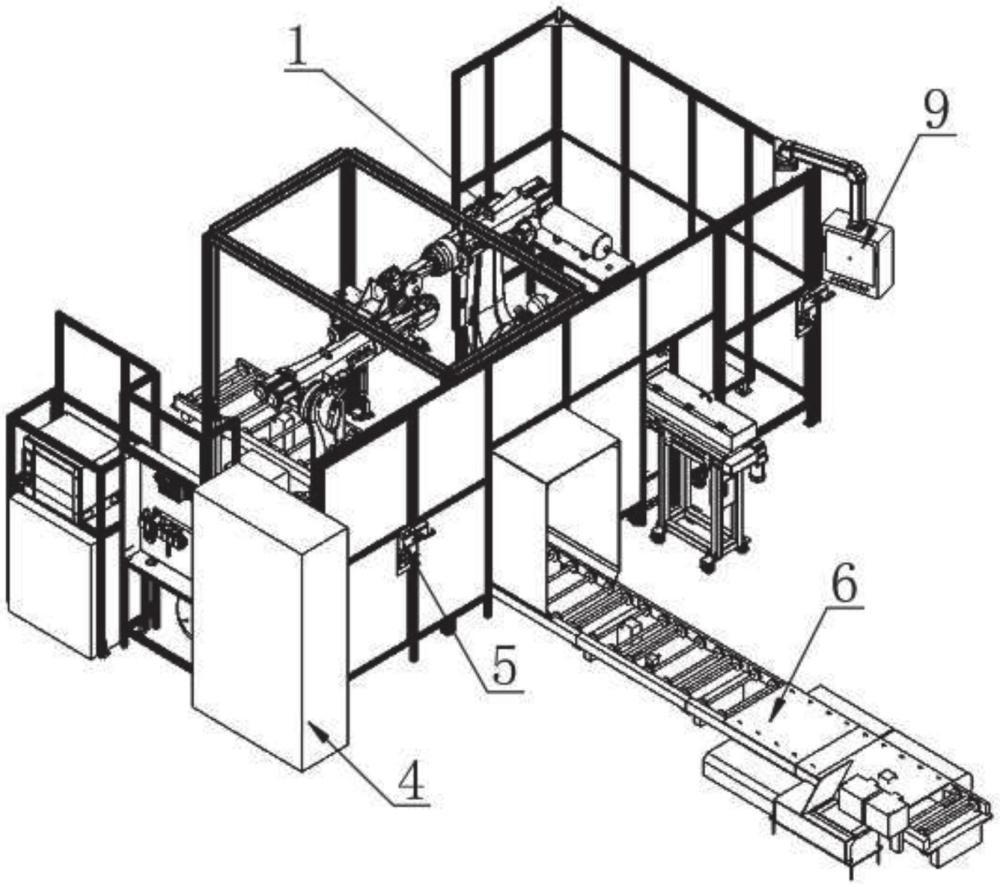
10、作為本發明優選的,所述加速傳輸設備還包括用于控制施加在螺栓的扭矩的擰緊槍組件、機器人組件、托盤在位組件、圍欄、總控制箱以及hmi,所述擰緊槍組件包括擰緊軸、套筒和延長桿,所述擰緊軸與所述套筒成垂直狀設置,所述延長桿與所述套筒固定連接,所述延長桿另一端固定連接有自動送釘機,所述圍欄固定安裝有緊急停止裝置,所述擰緊軸轉動安裝在所述所述擰緊槍組件主體下部。
11、作為本發明優選的,所述機器人組件包含六軸機器人、機器人底座、機器人控制箱和標定桿,,所述機器人底座上部固定安裝有六軸機器人,所述六軸機器人與所述機器人控制箱電連接,所述標定桿放置在所述機器人底座一側,所述機器人組件用于拖動擰緊槍快速位移到螺栓擰緊位置,執行擰緊命令,所述自動送釘組件用于儲存螺釘和輸送螺釘至所述擰緊槍組件,所述自動送釘組件包含送釘機和料倉,所述送釘機的輸入端固定連接所述料倉,所述托盤在位組件包含支架和傳感器,所述托盤定位組件包括止回氣缸、定位氣缸和底板,所述定位氣缸固定在所述底板上部,所述止回氣缸設有兩個,兩個所述止回氣缸分別固定在所述底板上部兩側。
12、與現有技術相比,本發明的有益效果如下:
13、本發明通過自動化系統集成多個功能模塊,優化了擰緊作業流程,提高了工作效率和精度,減少了人工干預,設備主要由擰緊槍組件、機器人組件、自動送釘組件、托盤在位組件、輸送組件、圍欄以及控制系統構成,協調合作完成自動化作業,首先,托盤通過高速輸送組件(線體)傳輸,電機驅動線體以較高速度將托盤送至擰緊工位,rfid系統實時監控托盤位置,確保精確到達工位,到達后,阻擋缸將托盤固定,定位氣缸確保托盤對準工作位置,止回氣缸防止托盤倒流,確保穩定,當托盤穩定后,六軸機器人根據指令將擰緊槍組件準確移至螺栓位置,完成擰緊任務,擰緊槍通過精確控制扭矩,確保螺栓緊固到設定值,避免過緊或過松,自動送釘組件通過送釘機和料倉供給螺釘,保證擰緊過程中的連續性,提高效率,設備還配備了緊急停止裝置,在發生緊急情況時能夠迅速中斷操作,確保安全,整個工作流程自動化高效,托盤傳輸、機器人操作、送釘和擰緊作業無縫銜接,減少了人工干預,提升了生產效率。
技術特征:
1.一種高效載具加速傳輸設備,包括輸送組件(6),其特征在于:還包括用于儲存螺釘和輸送螺釘的自動送釘組件(8),所述輸送組件(6)包括線體(6-9)、rfid(6-2)和電機(6-4),
2.如權利要求1所述的一種高效載具加速傳輸設備,其特征在于:所述還包括支腿(6-1)、防護盒(6-5)、控制柜(6-3)、跨線梯(6-6)、阻擋缸(6-8)和阻擋傳感器(6-7),其中所述線體(6-9)包括線體支架和線體輥子。
3.如權利要求2所述的一種高效載具加速傳輸設備,其特征在于:所述支腿(6-1)通過螺栓與線體(6-9)相連。
4.如權利要求2所述的一種高效載具加速傳輸設備,其特征在于:所述電機(6-4)采用螺栓與線體(6-9)固定連接,所述控制柜(6-3)控制電機(6-4)做啟停動作,所述控制柜(6-3)固定在所述線體(6-9)一側。
5.如權利要求2所述的一種高效載具加速傳輸設備,其特征在于:所述電機(6-4)包括電機盒和電機盒蓋,所述電機(6-4)用于驅動載具在線體(6-9)上加速移動,所述電機(6-4)為伺服電機,所述防護盒(6-5)固定在所述電機(6-4)外部。
6.如權利要求2所述的一種高效載具加速傳輸設備,其特征在于:所述跨線梯(6-6)固定在所述線體(6-9)上方,所述跨線梯(6-6)采用防滑設計。
7.如權利要求2所述的一種高效載具加速傳輸設備,其特征在于:所述阻擋缸(6-8)固定在所述線體(6-9)一側,用于阻擋載具的移動。
8.如權利要求2所述的一種高效載具加速傳輸設備,其特征在于:所述阻擋傳感器(6-7)與線體(6-9)固定連接。
9.如權利要求4所述的一種高效載具加速傳輸設備,其特征在于:所述加速傳輸設備還包括用于控制施加在螺栓的扭矩的擰緊槍組件(3)、機器人組件(1)、托盤在位組件(2)、圍欄(5)、總控制箱(4)以及hmi(9),所述擰緊槍組件(3)包括擰緊軸(3-3)、套筒(3-1)和延長桿(3-2),所述擰緊軸(3-3)與所述套筒(3-1)成垂直狀設置,所述延長桿(3-2)與所述套筒(3-1)固定連接,所述延長桿(3-2)另一端固定連接有自動送釘機,所述圍欄(5)固定安裝有緊急停止裝置,所述擰緊軸(3-3)轉動安裝在所述所述擰緊槍組件(3)主體下部。
10.如權利要求9所述的一種高效載具加速傳輸設備,其特征在于:所述機器人組件(1)包含六軸機器人(1-2)、機器人底座(1-4)、機器人控制箱(1-3)和標定桿(1-5),所述機器人底座(1-4)上部固定安裝有六軸機器人(1-2),所述六軸機器人(1-2)與所述機器人控制箱(1-3)電連接,所述六軸機器人(1-2)的移動部固定安裝有標定針(1-1),所述標定桿(1-5)放置在所述機器人底座(1-4)一側,所述自動送釘組件(7)包含送釘機和料倉,所述送釘機的輸入端固定連接所述料倉,所述托盤在位組件(2)包含支架和傳感器所述托盤定位組件(8)包括止回氣缸(7-2)、定位氣缸(7-3)和底板(7-1),所述定位氣缸(7-3)固定在所述底板(7-1)上部,所述止回氣缸(7-2)設有兩個,兩個所述止回氣缸(7-2)分別固定在所述底板(7-1)上部兩側。
技術總結
本發明公開了一種高效載具加速傳輸設備,包括輸送組件,還包括用于儲存螺釘和輸送螺釘的自動送釘組件,輸送組件包括線體、RFID和電機,其中,電機固定安裝線體,線體受電機驅動做加速傳輸動作,其中,RFID固定在線體一側,用于識別和追蹤載具的信息,自動送釘組件做自動化傳輸動作。本發明通過集成擰緊槍、機器人、自動送釘、托盤在位、輸送組件等模塊,優化了擰緊作業流程,提升效率和精度,減少人工干預,托盤通過高速輸送組件傳輸,RFID監控位置確保精確到達工位,阻擋缸和定位氣缸穩定托盤,六軸機器人根據指令將擰緊槍移至螺栓位置,完成扭矩控制擰緊,自動送釘組件保證螺釘連續供給,設備還具備緊急停止裝置,確保安全。
技術研發人員:林俊宇,李昊,陳賢明,曹熏陶,王佳琪
受保護的技術使用者:上海奧特博格汽車工程有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!