用于在停車場中自動停放機動車輛的方法與流程
本發明涉及一種用于在停車場中自動停放機動車輛的方法,其中:從軌跡存儲器中調用分配給停車場的參考停車場軌跡,機動車輛沿參考停車場軌跡自動移動,在沿參考停車場軌跡的移動期間,借助于車輛傳感器系統檢測環境傳感器數據,并且基于環境傳感器數據來執行停車位識別,并且當識別到未占用停車位時,機動車輛自動移動到未占用停車位。
背景技術:
1、在us2018/0328750?a1中已知這種方法。
技術實現思路
1、本發明是基于在相對繁忙的停車場中實現可靠的自動停車的任務。
2、根據本發明,該任務通過根據本發明的用于在停車場中自動停放機動車輛的方法來解決。
3、在根據本發明的用于在停車場中自動停放機動車輛的方法中,優選地基于機動車輛的位置數據來標識停車場,以及從機動車輛的軌跡存儲器中調用分配給停車場的參考停車場軌跡。存儲在軌跡存儲器中的參考停車場軌跡可例如已從車輛外部的計算機系統接收,或者可已通過在先前訪問停車場期間駕駛進入停車場而獲知。優選地,參考停車場軌跡經過停車場中的所有停車位。
4、在根據本發明的用于在停車場中自動停放機動車輛的方法中,還基于機動車輛的位置數據來檢查機動車輛是否位于調用到的參考停車場軌跡處,并且如果機動車輛位于參考停車場軌跡處,則機動車輛以已知方式沿參考停車場軌跡自動移動。優選地,機動車輛的駕駛員在沿參考停車場軌跡的自動移動開始之前離開機動車輛,并且經由聯接到機動車輛的移動裝置(例如經由聯接到機動車輛的智能手機)遠程監測自動停車過程。
5、在根據本發明的用于在停車場中自動停放機動車輛的方法中,在沿參考停車場軌跡的自動移動期間,借助于車輛傳感器系統以已知方式基本上連續地檢測環境傳感器數據,并且基于環境傳感器數據來執行停車位識別,以便識別在機動車輛附近是否存在未占用停車位。環境傳感器數據可包括例如雷達數據、激光雷達數據、超聲波數據或來自相機的圖像數據。例如,基于相機的圖像數據,可檢測線標記和停車場標識號。優選地,在停車位識別期間也考慮相應的機動車輛的尺寸,使得實際上只有適合于相應的機動車輛的停車過程的未占用停車位被識別為未占用停車位。
6、在根據本發明的用于在停車場中自動停放機動車輛的方法中,當在機動車輛附近識別到未占用停車位時,在識別到的未占用停車位中啟動停車過程,并且機動車輛以已知方式自動移動到識別到的未占用停車位。
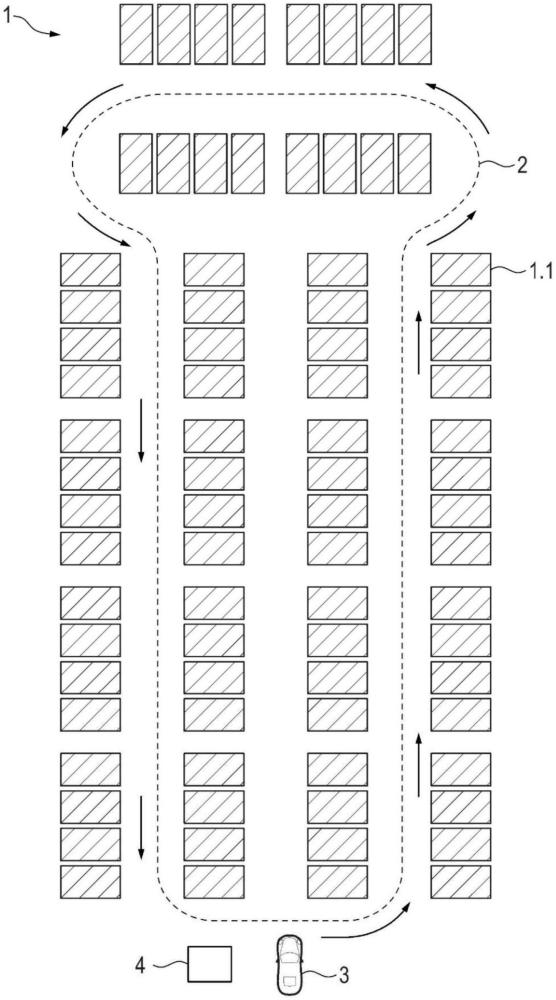
7、根據本發明,參考停車場軌跡是閉合環形軌跡,并且機動車輛沿參考停車場軌跡“繞圈”移動,直至識別到未占用停車位。因此,車輛沿被設計為閉合環形軌跡的參考停車場軌跡“繞圈”移動,超過自動移動的起始點,直至識別到未占用停車位。這使得即使在相對繁忙的停車場中也能夠實現可靠的自動停車。
8、優選地,參考停車場軌跡由車輛外部的計算機系統提供,使得根據本發明的方法也可在尚未被訪問的停車場中執行。當進入停車場時,參考停車場軌跡可例如由停車場的計算機系統經由本地數據連接來提供。然而,也可設想,參考停車場軌跡
9、由云計算機系統經由互聯網提供。
10、優選地,在接收到泊出命令之后,機動車輛自動移動到位于參考停車場軌跡上的轉交位置,使得機動車輛的駕駛員不必移動到機動車輛。例如,泊出命令可經由聯接到車輛的移動裝置傳輸到車輛。還可設想,泊出命令經由無線電鑰匙傳輸到車輛。
11、有利地,轉交位置可以是參考停車場軌跡上的任何位置,其中轉交位置由機動車輛的駕駛員確定。轉交位置可例如由駕駛員在離開車輛時/之前確定,例如作為用于沿參考停車場軌跡自動移動的起始位置。然而,也可設想,可隨后(即在離開車輛之后)例如經由聯接到車輛的移動裝置來確定轉交位置。
12、在優選型式中,轉交位置與泊出命令一起被接收。轉交位置可例如對應于發送泊出命令的移動裝置的當前位置。
13、優選地,對于沿參考停車場軌跡的兩個可能的回轉方向(即對于順時針移動和逆時針移動),分別確定從沿參考停車場軌跡的停車位置開始直至轉交位置的行駛路程,并且機動車輛自動沿兩個可能的回轉方向中的行駛路程較短的那個回轉方向移動,以便盡可能快和有效地將機動車輛移動到轉交位置。
技術特征:
1.一種用于在停車場(1)中自動停放機動車輛(3)的方法,其中:
2.根據權利要求1所述的方法,其中所述參考停車場軌跡(2)由車輛外部的計算機系統(4)提供。
3.根據前述權利要求中任一項所述的方法,其中所述機動車輛(3)在接收到泊出命令之后自動移動到位于所述參考停車場軌跡(2)上的轉交位置(5a,5b)。
4.根據權利要求3所述的方法,其中所述轉交位置(5a,5b)由所述機動車輛(3)的駕駛員確定。
5.根據權利要求4所述的方法,其中所述轉交位置(5a)與所述泊出命令一起被接收。
6.根據權利要求3至5中任一項所述的方法,其中針對沿所述參考停車場軌跡(2)的兩個可能的回轉方向,分別確定到所述轉交位置(5a,5b)的行駛路程,并且所述機動車輛(3)自動沿所述兩個回轉方向中的行駛路程較短的那個回轉方向移動。
技術總結
本發明涉及一種用于在停車場(1)中自動停放機動車輛(3)的方法,其中:從軌跡存儲器中調用分配給停車場(1)的參考停車場軌跡(2),機動車輛(3)沿參考停車場軌跡(2)自動移動,在沿參考停車場軌跡(2)的自動移動期間,借助于車輛傳感器系統檢測環境傳感器數據,并且基于該環境傳感器數據來執行停車位識別,并且當識別到未占用停車位(1.1u)時,該機動車輛自動移動到未占用停車位(1.1u),其中參考停車場軌跡(2)是閉合環形軌跡,并且機動車輛(3)沿參考停車場軌跡(3)移動,直至識別到未占用停車位(1.1u)。
技術研發人員:S·伊澤勒
受保護的技術使用者:保時捷股份公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!