一種基于安全控制的高功率輸出驅動信號異常處理方法與流程
本發明屬于安全控制,具體涉及一種基于安全控制的高功率輸出驅動信號異常處理方法。
背景技術:
1、在現代工業和物流領域,電動叉車作為一種高效率的搬運設備,其安全性和可靠性至關重要。然而,由于電動叉車涉及到復雜的電子控制和高功率輸出系統,驅動信號的異常處理成為了確保其安全運行的關鍵技術之一。
2、現有的處理器發生異常時的處理方法,例如公開號為cn105446851a的中國專利申請,提出一種處理器監控方法,包括以下步驟:mcu在獲得供電后啟動,mcu與處理器通信連接;mcu控制處理器中的各個電路按照預設的上電時序依次上電啟動,在控制各個電路上電啟動過程中,監測前一個電路上電啟動是否正常,在監測到前一個電路上電啟動正常后,再控制后一個電路進行上電啟動,若監測到任意一個電路上電啟動異常,則向報警電路發送與該電路對應的上電異常信號;報警電路根據上電異常信號進行報警。上述方法可在處理器啟動過程中迅速定位出處理器中的發生異常的電路,從而找出故障發生的原因。
3、然而,上述現有技術基于特定電路的上電異常信號進行報警,這種機制可能沒有考慮到不同類型異常的嚴重性和影響,導致報警信息不夠精細化,且異常信號處理效率較低,因此,需要一種高功率輸出驅動信號異常處理方法來保證高功率部件的安全輸出。
技術實現思路
1、為解決上述問題,本發明提供了一種基于安全控制的高功率輸出驅動信號異常處理方法,以解決現有技術中的問題。
2、為了達到上述的發明目的,本發明提出一種基于安全控制的高功率輸出驅動信號異常處理方法,所述方法包括一種控制電路,控制電路用于控制電動叉車的高功率穩定輸出,所述控制電路包括以下組成部件:
3、mcu、驅動轉換電路、信號反饋電路、驅動信號切換電路、負載運行電路以及電容自激震蕩電路;
4、其中,所述電容自激震蕩電路包括三極管u1a、三極管u2a、電容c1、電容c2、電阻以及電源;
5、所述三極管u1a的集電極與電容c2連接,并分布在電源正極與電源地線之間;
6、所述三極管u2a的基極通過電阻與電源正極相連,并通過三極管u1a的發射極與電源地線相連;
7、三極管u2a的集電極與電容c1進行相連,電容c2通過三極管u1a的發射極與電源地線相連。
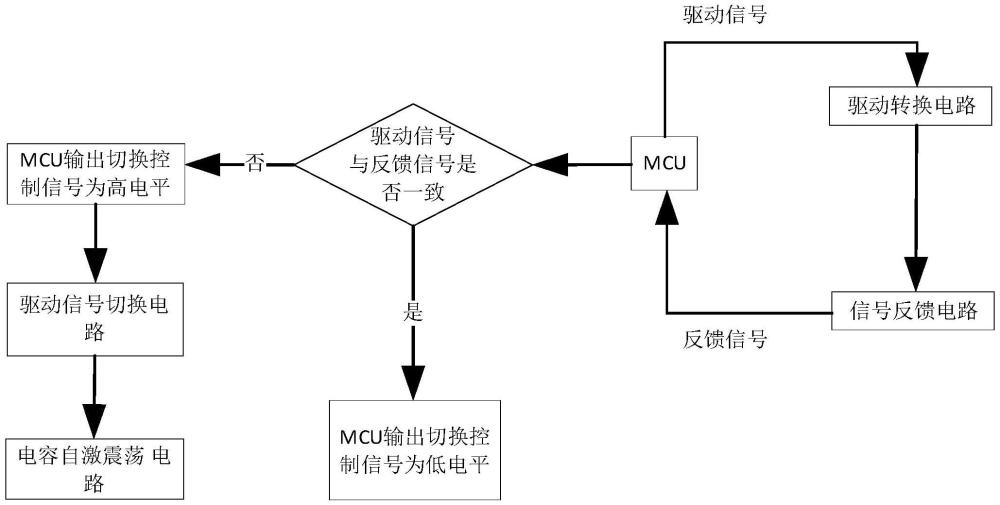
8、進一步地,所述控制電路中的mcu作為電路的控制中心,接收電動叉車的動作指令生成控制信號,并發送至驅動轉換電路,所述驅動轉換電路將所述控制信號轉換為適合驅動高功率負載的驅動信號,基于信號反饋電路監控所述驅動信號的狀態,并生成反饋信號返回至mcu,mcu判斷所述反饋信號與驅動信號是否一致,是的情況下,mcu保持當前的切換控制信號為低電平信號,驅動信號切換電路輸出正常驅動信號;若不一致,mcu輸出切換控制信號為高電平信號,基于高電平信號啟動電容自激震蕩電路,所述電容自激震蕩電路生成自激驅動信號。
9、進一步地,若所述反饋信號與驅動信號不一致還包括以下步驟:
10、s31:判斷所述反饋信號和驅動信號是否為同一類型,否的情況下,將兩種信號都轉換為數字信號,計算所述反饋信號和驅動信號的差異值,若所述差異值小于等于第一閾值,則在mcu中設置驅動信號自適應調整機制,基于自適應算法對所述驅動信號進行調整獲得新的驅動信號;
11、s32:重復步驟s31,直至新的所述驅動信號與所述反饋信號一致。
12、進一步地,若所述差異值大于第一閾值時包括以下步驟:
13、基于貝葉斯網絡建立故障診斷模型,基于所述故障診斷模型對電動叉車的系統進行檢測,識別故障原因,觸發報警信號,并將所述故障原因通過無線通信傳輸至遠程服務器。
14、進一步地,基于自適應算法對所述驅動信號進行調整獲得新的驅動信號包括以下步驟:
15、所述自適應算法為pid控制算法,為所述pid控制算法設置初始參數,包括比例項、積分項和微分項,將所述差異值輸入所述pid控制算法對所述初始參數進行調整,基于調整后的初始參數獲得新的驅動信號,設置所述驅動信號的目標值,當新的所述驅動信號滿足所述目標值,則對所述新的所述驅動信號進行輸出。
16、進一步地,對所述初始參數進行調整包括以下步驟:
17、基于第一公式計算調整后的所述比例項p,所述第一公式為:p=kpe,其中,e為所述差異值,kp為比例項的系數,基于第二公式計算調整后的所述積分項i,所述第二公式為:i=i(t-1)+ki∫e(t)dt,其中,i(t-1)為上個時間點t-1的積分項值,ki為積分項的系數,e(t)為t時刻的差異值,基于第三公式計算調整后的所述微分項d,其中,其中,kd為微分項的字數,為差異值隨時間t的變化率,基于第四公式新的驅動信號u,所述第四公式為:u=p+i+d。
18、進一步地,所述自激驅動信號用于直接驅動電動叉車的高功率輸出部件。
19、進一步地,基于貝葉斯網絡建立故障診斷模型包括以下步驟:
20、確定所述電動叉車的硬件組件以及用于控制所述硬件組件的軟件,在貝葉斯網絡中為所述硬件組件和軟件創建節點,為每個節點定義狀態信息,所述狀態信息用于反映所述硬件組件或軟件的運行狀況,確定節點之間的關系信息,將所有的節點和節點之間的關系信息集成至故障診斷模型。
21、進一步地,識別故障原因包括以下步驟:
22、定義故障類型,對于每種故障類型識別故障原因,對所述故障原因進行分組,對每組故障原因設置檢測周期,每隔所述檢測周期對所述電動叉車進行故障檢測,獲得實時故障,判斷所述實時故障的故障類型,基于所述故障類型定位故障原因。
23、進一步地,所述關系信息用條件概率表進行表示,所述條件概率表用于描述在給定父節點狀態信息的情況下,子節點處于特定狀態的概率值。
24、與現有技術相比,本發明的有益效果至少如下所述:
25、本發明設計一種控制電路,包括mcu、驅動轉換電路、信號反饋電路、驅動信號切換電路、負載運行電路以及電容自激震蕩電路;通過比較驅動信號和反饋信號,mcu可以判斷系統是否按預期工作,如果信號一致,系統保持當前狀態;如果不一致,在mcu發出的驅動信號立即切換到自激驅動信號,保證車輛運行狀態不變,確保作業人員能夠安全操作;mcu還會計算驅動信號和反饋信號的差異值并進行調整,直至系統輸出與預期一致,提高了系統的穩定性和可靠性;當差異值超過第一閾值時,mcu利用貝葉斯網絡建立故障診斷模型,對系統進行檢測并識別故障原因,提高故障診斷的準確性,減少誤報和漏報。
技術特征:
1.一種基于安全控制的高功率輸出驅動信號異常處理方法,其特征在于,所述方法包括一種控制電路,控制電路用于控制電動叉車的高功率穩定輸出,所述控制電路包括以下組成部件:
2.根據權利要求1所述的方法,其特征在于,所述控制電路中的mcu作為電路的控制中心,接收電動叉車的動作指令生成控制信號,并發送至驅動轉換電路,所述驅動轉換電路將所述控制信號轉換為適合驅動高功率負載的驅動信號,基于信號反饋電路監控所述驅動信號的狀態,并生成反饋信號返回至mcu,mcu判斷所述反饋信號與驅動信號是否一致,是的情況下,mcu保持當前的切換控制信號為低電平信號,驅動信號切換電路輸出正常驅動信號;若不一致,mcu輸出切換控制信號為為高電平信號,基于高電平信號啟動電容自激震蕩電路,所述電容自激震蕩電路生成自激驅動信號。
3.根據權利要求2所述的方法,其特征在于,若所述反饋信號與驅動信號不一致還包括以下步驟:
4.根據權利要求3所述的方法,其特征在于,若所述差異值大于第一閾值時包括以下步驟:
5.根據權利要求3所述的方法,其特征在于,基于自適應算法對所述驅動信號進行調整獲得新的驅動信號包括以下步驟:
6.根據權利要求5所述的方法,其特征在于,對所述初始參數進行調整包括以下步驟:
7.根據權利要求2所述的方法,其特征在于,所述自激驅動信號用于直接驅動電動叉車的高功率輸出部件。
8.根據權利要求4所述的方法,其特征在于,基于貝葉斯網絡建立故障診斷模型包括以下步驟:
9.根據權利要求4所述的方法,其特征在于,識別故障原因包括以下步驟:
10.根據權利要求8所述的方法,其特征在于,所述關系信息用條件概率表進行表示,所述條件概率表用于描述在給定父節點狀態信息的情況下,子節點處于特定狀態的概率值。
技術總結
本發明公開了一種基于安全控制的高功率輸出驅動信號異常處理方法,屬于安全控制技術領域,包括:控制電路中的MCU作為電路的控制中心,接收電動叉車的動作指令生成控制信號,發送至驅動轉換電路,驅動轉換電路將控制信號轉換為適合驅動高功率負載的驅動信號,基于信號反饋電路監控驅動信號的狀態,并生成反饋信號返回至MCU,MCU判斷反饋信號與驅動信號是否一致,若一致,MCU保持當前的切換控制信號為低電平信號,若不一致,切換控制信號為高電平信號,基于高電平信號啟動電容自激震蕩電路,生成自激驅動信號。本發明在MCU失效時,可快速切換到電容自激震蕩電路,維持高功率部件的狀態不變,實現安全控制。
技術研發人員:張凱,劉毅,李飛,姚欣
受保護的技術使用者:河南嘉晨智能控制股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!