基于需求功率預(yù)測的插電式混合動力汽車自適應(yīng)能量管理方法
本發(fā)明屬于插電式混合動力汽車能量管理,涉及一種基于需求功率預(yù)測的插電式混合動力汽車自適應(yīng)能量管理方法。
背景技術(shù):
1、插電式混合動力汽車具有發(fā)動機和電機兩個動力源,然而發(fā)動機和電機的高效區(qū)和工作特性差異較大。為了提高混合動力系統(tǒng)的性能,就要使發(fā)動機和電機之間協(xié)同配合、優(yōu)勢互補。因此,能量管理策略是插電式混合動力汽車的關(guān)鍵技術(shù)之一。
2、車輛行駛工況是混合動力汽車能量管理策略設(shè)計的依據(jù),對混合動力汽車的燃油經(jīng)濟性具有重要的影響。相關(guān)學(xué)者對工況信息獲取等領(lǐng)域開展了大量的研究,但是現(xiàn)有的研究中多數(shù)僅對未來車速進(jìn)行預(yù)測,忽略了加減速度和道路坡度的影響。即使有學(xué)者考慮了道路坡度,但也是將車速、坡度分別進(jìn)行預(yù)測,這無疑增加了預(yù)測的復(fù)雜性。此外,現(xiàn)有的研究中認(rèn)為預(yù)測得到的工況信息是準(zhǔn)確的,沒有考慮當(dāng)預(yù)測不準(zhǔn)確時應(yīng)如何處理。
技術(shù)實現(xiàn)思路
1、有鑒于此,本發(fā)明的目的在于提供一種基于需求功率預(yù)測的插電式混合動力汽車自適應(yīng)能量管理方法,在對未來需求功率進(jìn)行預(yù)測時同時考慮車速和坡度,針對預(yù)測不準(zhǔn)確的情況,提出一種在線修正方法,對進(jìn)一步提升插電式混合動力汽車的節(jié)能潛力、保障行車安全具有重要意義。
2、為達(dá)到上述目的,本發(fā)明提供如下技術(shù)方案:
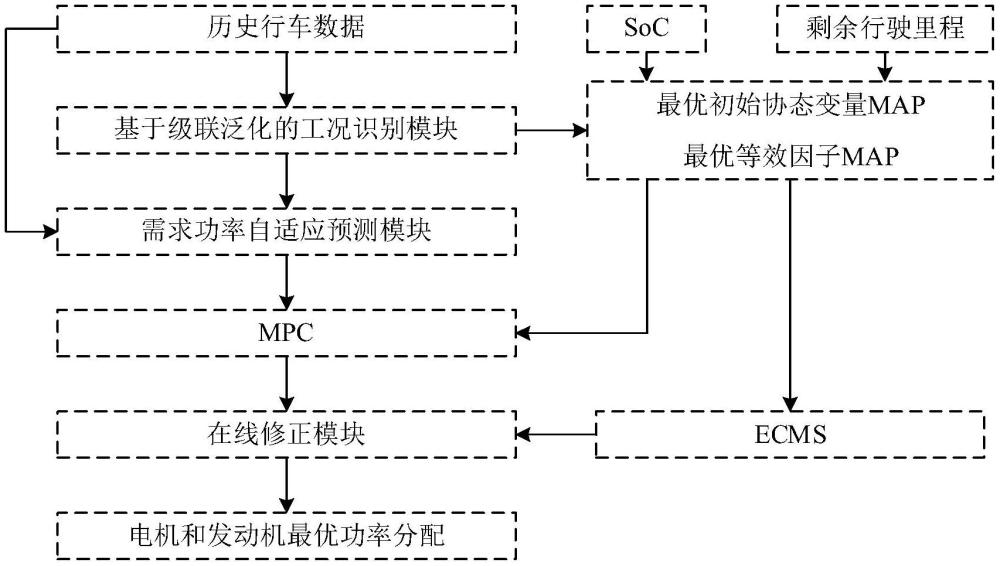
3、一種基于需求功率預(yù)測的插電式混合動力汽車自適應(yīng)能量管理方法,包括以下步驟:
4、s1:構(gòu)建基于級聯(lián)泛化的工況識別模型,對車輛行駛工況類型進(jìn)行在線識別;
5、s2:對不同工況下的協(xié)態(tài)變量、等效因子進(jìn)行尋優(yōu),構(gòu)建最優(yōu)初始協(xié)態(tài)變量map及最優(yōu)等效因子map圖;
6、s3:針對不同的工況類別,訓(xùn)練不同的需求功率預(yù)測模型,對不同工況下的需求功率進(jìn)行自適應(yīng)預(yù)測;
7、s4:根據(jù)相鄰歷史周期內(nèi)的真實需求功率和預(yù)測得到的需求功率差值的平均值和標(biāo)準(zhǔn)差,對電機和發(fā)動機的輸出功率進(jìn)行在線修正。
8、進(jìn)一步,步驟s1所述構(gòu)建基于級聯(lián)泛化的工況識別模型,對車輛行駛工況類型進(jìn)行在線識別,具體包括:
9、采集真實道路行駛數(shù)據(jù),對原始數(shù)據(jù)進(jìn)行短行程片段的劃分;依據(jù)車輛行駛特點選取特征參數(shù),通過相關(guān)性分析與主成分分析對特征參數(shù)降維;根據(jù)降維后的特征參數(shù)對短行程片段進(jìn)行聚類分析;根據(jù)聚類結(jié)果,基于級聯(lián)泛化的方法訓(xùn)練得到工況識別模型。
10、進(jìn)一步,步驟s1具體包括以下步驟:
11、首先利用車載傳感器采集車輛的實際行車數(shù)據(jù),包括車速及道路坡度,對采集到的數(shù)據(jù)進(jìn)行處理,保證車速和坡度數(shù)據(jù)的時間戳同步,并對原始數(shù)據(jù)進(jìn)行濾波,去除噪聲;利用式(1)計算得到每一時刻下車輛所需的需求功率:
12、
13、式中pd為整車需求功率,m為整車質(zhì)量,g為重力加速度,f為滾動阻力系數(shù),v為車速,α為道路坡度角,ρ為空氣密度,a為車輛迎風(fēng)面積,cd為風(fēng)阻系數(shù),δ為旋轉(zhuǎn)質(zhì)量換算系數(shù),為車輛加速度;
14、將連續(xù)的整車需求功率數(shù)據(jù)集劃分為n個短行程片段,從一個需求功率為零的點到下一個需求功率為零的點即為一個短行程片段;初選能夠代表各個短行程片段的特征參數(shù)如下:最大需求功率pmax=max{p1、p2、…、pk}、最小需求功率pmin=min{p1、p2、…、pk}、平均需求功率需求功率標(biāo)準(zhǔn)差需求功率變化率最大值pm′ax=max{p1′、p2′、…、pk′}、需求功率變化率最小值pm′in=min{p1′、p2′、…、pk′}、需求功率變化率平均值需求功率變化率標(biāo)準(zhǔn)差負(fù)需求功率變化率的平均值正需求功率變化率的平均值負(fù)需求功率變化率的標(biāo)準(zhǔn)差正需求功率變化率的標(biāo)準(zhǔn)差需求功率變化率為負(fù)所占的時間比例需求功率變化率為正所占的時間比例其中p、p′、k、k1、k2、α分別為需求功率、需求功率變化率、短行程片段的時間長度、負(fù)需求功率變化率的時間長度、正需求功率變化率的時間長度、以及時間比例;
15、對以上特征參數(shù)進(jìn)行主成分分析,首先利用式(2)對特征參數(shù)進(jìn)行歸一化:
16、
17、式中xi,j為歸一化后的第i個短行程片段的第j個特征參數(shù),xi,j為第i個短行程片段的第j個特征參數(shù),μj為第j個特征參數(shù)的平均值,σj為第j個特征參數(shù)的標(biāo)準(zhǔn)差;歸一化后的特征參數(shù)矩陣如式(3)所示:
18、
19、求取特征參數(shù)集的協(xié)方差矩陣:
20、
21、如式(5)所示計算協(xié)方差矩陣的特征值和特征向量:
22、
23、式中λ為特征值,i為單位矩陣,v為特征向量;
24、按特征值從大到小排序,對應(yīng)的主成分的重要性遞減,選擇累計貢獻(xiàn)率大于80%的m個主成分:
25、
26、將標(biāo)準(zhǔn)化后的特征參數(shù)矩陣投影到主成分空間:
27、y=x·w(7)
28、式中y為降維后的數(shù)據(jù),w為由前m個特征向量組成的矩陣;
29、利用主成分分析得到的各短行程片段的主成分參數(shù),采用基于密度的dbscan聚類算法對n個短行程片段分類,從而將n個短行程片段分為δ種工況類別;
30、采用級聯(lián)泛化方法構(gòu)建工況識別器,以支持向量機(support?vector?machine,svm)、隨機森林(random?forest,rf)以及邏輯回歸(logistic?regression,lr)作為初級分類器,多層感知機(multilayer?perceptron,mlp)作為元分類器;初級分類器的輸入為m個主成分(pc1,pc2,…,pcm),輸出為當(dāng)前工況屬于某類工況的概率;將三個初級分類器的輸出拼接作為mlp的輸入特征,mlp的輸出為工況類型標(biāo)簽;利用短行程片段對級聯(lián)泛化工況識別模型進(jìn)行離線訓(xùn)練,得到最終的工況識別模型。
31、進(jìn)一步,所述dbscan聚類算法的流程如下:
32、①定義鄰域半徑eps和判斷核心點的閾值minpts;
33、②遍歷所有數(shù)據(jù)點,計算每個點鄰域內(nèi)的點數(shù);若某個點的鄰域點數(shù)大于minpts,認(rèn)為該點為核心點;
34、③將所有點標(biāo)記為未訪問點,隨機選擇一個未訪問點i,若i為核心點則創(chuàng)建一個新簇c,通過深度優(yōu)先搜索,將所有從i密度可達(dá)的點加入簇c;若i是邊界點或噪聲點,則標(biāo)記為噪聲;重復(fù)本步驟,直到所有點被訪問;
35、④將邊界點歸入其所屬核心點的簇中,未被任何簇包含的點標(biāo)記為噪聲。
36、進(jìn)一步,步驟s2所述對不同工況下的協(xié)態(tài)變量、等效因子進(jìn)行尋優(yōu),構(gòu)建最優(yōu)初始協(xié)態(tài)變量map及最優(yōu)等效因子map圖,具體包括:
37、依據(jù)步驟s1聚類得到的不同工況類別,探究不同行駛里程、電池初始soc對協(xié)態(tài)變量及等效因子的影響規(guī)律,利用優(yōu)化算法,以能耗最小為目標(biāo)函數(shù),對不同工況下的協(xié)態(tài)變量、等效因子進(jìn)行尋優(yōu),構(gòu)建最優(yōu)初始協(xié)態(tài)變量map及最優(yōu)等效因子map圖。
38、進(jìn)一步,步驟s2具體包括以下步驟:
39、依據(jù)極光優(yōu)化算法原理對不同行駛工況、初始soc、行駛里程下的初始協(xié)態(tài)變量及等效因子進(jìn)行尋優(yōu);
40、工況類別有δ組,設(shè)定7組初始soc,行駛里程以一個wltc工況總里程為基準(zhǔn),共5組;對δ×7×5組駕駛場景下的初始協(xié)態(tài)變量及等效因子依次進(jìn)行尋優(yōu),具體流程如下:
41、⑤初始化種群規(guī)模、變量維度、最大迭代次數(shù)及搜索空間;
42、⑥在某組特定駕駛場景下,將每一個粒子,即當(dāng)前初始協(xié)態(tài)變量或等效因子,代入整車模型進(jìn)行仿真,并計算適應(yīng)度函數(shù):
43、
44、式中,t0和tend分別表示工況開始和結(jié)束時刻,sf為燃油價格,為瞬時發(fā)動機油耗,se為電能價格,pb(t)為瞬時電池充電或放電功率;
45、⑦根據(jù)帶電粒子沿磁場線做旋轉(zhuǎn)運動,更新粒子速度:
46、
47、式中,c為積分常數(shù),q為攜帶的電荷,b為地球磁場強度,α為阻尼因子、m為粒子質(zhì)量;
48、根據(jù)極光橢圓步道理論更新粒子位置:
49、
50、式中,levy(d)為萊維分布,xavg為粒子群的質(zhì)心位置,x(i)為當(dāng)前粒子i的位置,ub、lb為解空間的上下限,r1為隨機因子,xnew(i)為粒子i更新后的位置,w1和w2為權(quán)重系數(shù),r2為干擾因子;
51、通過粒子碰撞來跳出局部最優(yōu)解,當(dāng)粒子發(fā)生碰撞時,其位置更新公式為:
52、
53、式中,r3、r4為0-1之間的隨機數(shù),x(j)為粒子群中任意粒子,t為當(dāng)前迭代次數(shù),t為最大迭代次數(shù);
54、⑧當(dāng)達(dá)到最大迭代次數(shù)或適應(yīng)度標(biāo)準(zhǔn)差連續(xù)k次迭代小于第一閾值或全局最優(yōu)解適應(yīng)度改進(jìn)率低于第二閾值時,停止迭代;
55、在迭代過程中滿足以下約束:
56、ne,min≤ne(k)≤ne,max
57、nm,min≤nm(k)≤nm,max
58、socmin≤soc(k)≤socmax
59、te,min(ne(k))≤te(k)≤te,max(ne(k))
60、tm,min(nm(k),soc(k))≤tm(k)≤tm,max(nm(k),soc(k))
61、td(k)=η0ηgi0ig(te(k)+tm(k))+tb(k)??(12)
62、式中,ne為發(fā)動機轉(zhuǎn)速;nm為電機轉(zhuǎn)速;soc為電池電量;te為發(fā)動機扭矩;tm為電機扭矩;下標(biāo)min和max定義了對應(yīng)變量的上下限;td為驅(qū)動轉(zhuǎn)矩;tb為機械制動轉(zhuǎn)矩;η0和ηg分別為主減速器和變速箱的傳動效率;i0和ig分別為主減速器和變速箱的傳動比;
63、將優(yōu)化后的結(jié)果放入一張3維表格中,輸入為工況類型、初始soc、行駛里程,輸出為當(dāng)前輸入下的最優(yōu)初始協(xié)態(tài)變量或最優(yōu)等效因子。
64、進(jìn)一步,步驟s3所述針對不同的工況類別,訓(xùn)練不同的需求功率預(yù)測模型,對不同工況下的需求功率進(jìn)行自適應(yīng)預(yù)測,具體包括:
65、探究不同工況類型下樣本輸入窗時間、輸出窗時間及滾動時域三個參數(shù)對預(yù)測精度的影響規(guī)律,得到不同工況下的最優(yōu)參數(shù)組合,結(jié)合工況識別模型,實現(xiàn)一種需求功率自適應(yīng)預(yù)測方法。
66、進(jìn)一步,步驟s3具體包括以下步驟:
67、針對不同的工況類別,單獨訓(xùn)練需求功率預(yù)測器;基于變分模態(tài)分解(variational?mode?decomposition,vmd)、牛頓-拉夫遜邊界優(yōu)化(newton?raphson?basedoptimizer,nrbo)和長短期記憶網(wǎng)絡(luò)(long?short-term?memory,lstm)構(gòu)建需求功率預(yù)測器,流程如下:
68、⑦對每類工況的短行程片段劃分訓(xùn)練集和測試集;
69、⑧確定需求功率預(yù)測器的輸入時間窗h、輸出時間窗p及滾動時域l,通過試湊法得到三者的最佳組合,以適應(yīng)不同的工況類別;
70、⑨利用vmd模態(tài)分解將原始需求功率序列分解為k個imf分量和一個殘差:
71、
72、式中,uk(t)代表第k個模態(tài)分量,x(t)代表原始需求功率序列,r(t)代表殘差;
73、⑩利用牛頓-拉夫遜邊界優(yōu)化算法消除imf分量的端點效應(yīng),首先對每個imf兩端進(jìn)行對稱延拓,通過二階導(dǎo)數(shù)優(yōu)化延拓部分,最小化邊界區(qū)域誤差,從而優(yōu)化邊界連續(xù)性;
74、將優(yōu)化后的imf、殘差以及歷史行車工況類型作為lstm的輸入,定義為lstmin=[i,h]t,其中i表示優(yōu)化后的imf之一,h為歷史行駛工況類型,即:
75、
76、式中,h為輸入時間窗口。將i和h輸入至lstm網(wǎng)絡(luò)中,得到輸出lstmout,即車輛未來需求功率的模態(tài)分量之一:
77、lstmout=[it+1,it+2,…,it+p](15)
78、式中,p為輸出時間窗口l
79、按照以上步驟,針對優(yōu)化后的各個imf和殘差分別訓(xùn)練lstm神經(jīng)網(wǎng)絡(luò)預(yù)測模型,將預(yù)測后的imf和殘差進(jìn)行疊加,得到預(yù)測時域內(nèi)的需求功率序列。
80、進(jìn)一步,步驟s4所述根據(jù)相鄰歷史周期內(nèi)的真實需求功率和預(yù)測得到的需求功率差值的平均值和標(biāo)準(zhǔn)差,對電機和發(fā)動機的輸出功率進(jìn)行在線修正,具體包括:
81、根據(jù)需求功率預(yù)測模型得到未來一段時間內(nèi)的需求功率,利用pmp求解預(yù)測時域內(nèi)的最優(yōu)控制序列;以歷史預(yù)測數(shù)據(jù)與真實行車數(shù)據(jù)誤差的平均值和標(biāo)準(zhǔn)差作為模糊控制器的輸入,其輸出為修正系數(shù),該系數(shù)越大表明預(yù)測越精確;ecms求解得到一個控制量;最后實際作用于車輛的控制量為mpc和ecms求解結(jié)果的加權(quán)和。
82、進(jìn)一步,步驟s4具體包括以下步驟:
83、①采集實車行駛過程中的歷史需求功率數(shù)據(jù),計算其m個主成分并作為基于級聯(lián)泛化的工況識別模型的輸入,進(jìn)而得到當(dāng)前工況類別;
84、②根據(jù)當(dāng)前工況類別,剩余行駛距離、soc,利用最優(yōu)初始協(xié)態(tài)變量map及最優(yōu)等效因子map圖查得最優(yōu)初始協(xié)態(tài)變量及最優(yōu)等效因子;
85、③根據(jù)工況類別選擇相應(yīng)的需求功率預(yù)測器,以歷史需求功率為輸入,經(jīng)vmd-nrbo-lstm輸出得到預(yù)測時域內(nèi)的需求功率;
86、④采用pmp算法求解預(yù)測時域內(nèi)的最優(yōu)控制問題,最優(yōu)控制問題的目標(biāo)函數(shù)為:
87、
88、系統(tǒng)滿足約束條件如式(12)所示;
89、哈密爾頓函數(shù)為:
90、
91、式中,pm(t)為電機功率,λ(t)為協(xié)態(tài)變量;初始協(xié)態(tài)變量為最優(yōu)協(xié)態(tài)變量map查得,soc為電池荷電狀態(tài);
92、當(dāng)哈密爾頓取極小值時,目標(biāo)函數(shù)為最小值,得出最優(yōu)控制變量序列為:
93、
94、⑤與此同時,采用ecms求解得到一個控制量:
95、
96、式中,s(t)為當(dāng)前工況、soc、剩余行駛里程下的最優(yōu)等效因子,由最優(yōu)等效因子map查得;ql為燃油低熱值;
97、⑥若相鄰歷史周期內(nèi)需求功率預(yù)測結(jié)果準(zhǔn)確,則合理假設(shè)下一預(yù)測周期精度也是可信的;根據(jù)該假設(shè),以相鄰歷史周期內(nèi)的真實需求功率和預(yù)測得到的需求功率差值的平均值和標(biāo)準(zhǔn)差作為模糊控制器的輸入,模糊控制器的輸出為預(yù)測可信度系數(shù)該系數(shù)越大表明需求功率預(yù)測可信度越高,反之,表明需求功率預(yù)測可信度較低;
98、⑦真實作用于實車的控制量為:
99、
100、式中,p*m(t)、p*e(t)為經(jīng)過在線修正的最優(yōu)電機和發(fā)動機功率。
101、本發(fā)明的有益效果在于:
102、(1)通過級聯(lián)泛化的方式,進(jìn)一步提升了工況識別的精度;
103、(2)不必單獨對車速和道路坡度進(jìn)行預(yù)測,可直接預(yù)測得到未來一段時間內(nèi)的整車需求功率;
104、(3)在不同行駛工況下,需求功率預(yù)測算法可實現(xiàn)輸入窗時間、輸出窗時間及滾動時域的自適應(yīng)調(diào)節(jié);
105、(4)當(dāng)需求功率預(yù)測不準(zhǔn)確時,可通過在線修正算法對mpc求解結(jié)果進(jìn)行修正,保障行車安全。
106、本發(fā)明的其他優(yōu)點、目標(biāo)和特征在某種程度上將在隨后的說明書中進(jìn)行闡述,并且在某種程度上,基于對下文的考察研究對本領(lǐng)域技術(shù)人員而言將是顯而易見的,或者可以從本發(fā)明的實踐中得到教導(dǎo)。本發(fā)明的目標(biāo)和其他優(yōu)點可以通過下面的說明書來實現(xiàn)和獲得。
- 還沒有人留言評論。精彩留言會獲得點贊!