一種無人車超速檢測與剎車失靈緊急制動方法及系統
本發明涉及無人車輛行駛安全,尤其涉及一種無人車超速檢測與剎車失靈緊急制動方法及系統。
背景技術:
1、超速失控是影響無人車安全的主要風險因素之一。無人車超速失控通常指的是無人車在行駛過程中,由于各種原因(如控制系統故障、傳感器失效、外部干擾等)導致其行駛速度超過設計的安全速度范圍,并且無法通過正常的控制手段(如剎車、減速等)使其速度降低到安全范圍內。這種情況極易引發嚴重交通事故,威脅乘客、行人及其他道路使用者的安全。
2、目前,針對無人車超速失控問題,已有一些緊急制動系統和方法被提出并應用于實際場景中。現有無人駕駛車輛的安全系統依賴于主制動系統及電子控制單元(ecu)的可靠性,然而,單一系統的故障(如傳感器漂移、軟件邏輯錯誤或機械制動失效)可能導致超速或剎車失靈等致命風險。盡管部分方案嘗試引入冗余設計,但其往往依賴多傳感器融合技術,導致系統復雜度高、成本攀升,且多源數據融合的實時性與一致性難以保障,存在算力依賴高、延時顯著、故障傳播風險大的問題,反而可能引入新的故障點。此外,傳統冗余制動系統多采用與主系統同構的備份機制,在極端工況下可能因共性故障(如電源失控)而同時失效,無法實現真正的安全冗余。
3、單磁傳感通道結合自適應濾波算法,直接測量電機轉速并獨立解算車速,通過硬件級隔離確保數據采集不受主系統故障影響。相較于傳統方案,單傳感器架構降低了信號沖突風險,同時通過動態標定與誤差補償模型實現不亞于多傳感器融合的精度,為冗余制動提供了獨立、低延時的決策依據。
4、綜上,如何為保障無人車的行駛安全,提高在無人車超速失控下的緊急制動的實時性和可靠性,是亟需解決的技術問題。
技術實現思路
1、發明目的:針對現有的無人車在行駛過程中出現的超速以及剎車系統失靈的問題,以及目前的緊急制動裝置存在的問題和挑戰,本發明提出了一種無人車超速檢測與剎車失靈緊急制動方法及系統,旨在通過高精度的車輪轉速感知和智能控制策略,在無人車超速且剎車系統失靈時,快速切斷電源,使車輛安全停下,從而有效避免事故的發生。
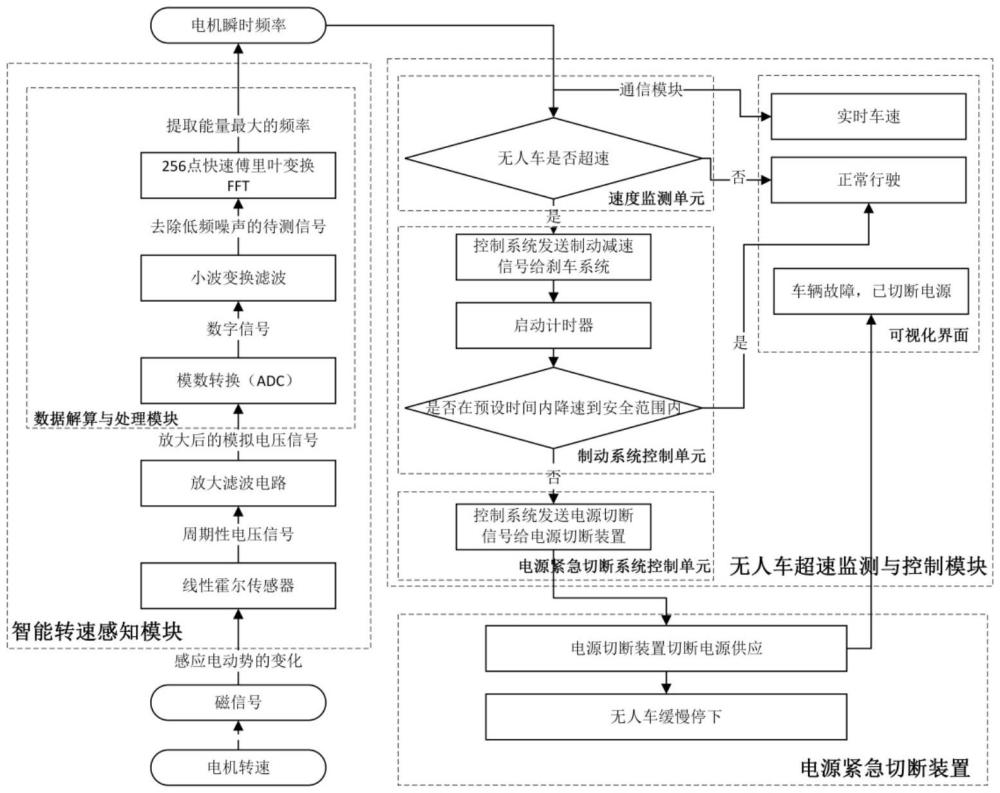
2、技術方案:本發明無人車超速檢測與剎車失靈緊急制動方法由緊急制動系統實施,該緊急制動系統包括轉速感知模塊、無人車超速監測與控制模塊和電源緊急切斷裝置。
3、其中,轉速感知模塊包括線性霍爾傳感器、磁傳感器、放大濾波電路、數模轉換器adc、數據解算與處理模塊;線性霍爾傳感器與放大濾波電路連接;放大濾波電路與數據解算與處理模塊連接;數據解算與處理模塊與無人車超速監測與控制模塊連接。
4、線性霍爾傳感器安裝在無人車車輪電機附近,利用磁傳感器采集車輪電機轉子旋轉產生的磁場變化,將機械轉動轉換為磁信號,并將磁信號轉換為周期性電壓信號輸出;放大濾波電路將采集到的信號進行放大濾波,以去除噪聲并增強信號;數模轉換器adc將經過濾波的模擬電壓信號轉換為數字信號,輸出給數據解算與處理模塊;數據解算與處理模塊接收到數字信號后,通過小波變換,濾除低頻噪聲,保留信號有用的成分,然后對濾波后的信號進行256點快速傅里葉變換fft,提取信號中的頻譜成分;數據解算與處理模塊將頻譜中能量最大的頻率作為電機轉速的瞬時頻率,為無人車的速度監測系統提供基礎數據,實現對無人車車輪電機轉速的實時監測。
5、無人車超速監測與控制模塊包括速度監測單元、制動系統控制單元、通信模塊、電源緊急切斷系統控制單元和可視化界面;其中,速度監測單元通過通信接口分別與數據解算與處理模塊和可視化界面連接;制動系統控制單元與速度監測單元連接;電源緊急切斷系統控制單元與制動系統控制單元連接。
6、無人車超速監測與控制模塊的速度監測單元接收轉速感知模塊提供的電機瞬時頻率信息,通過通信模塊將無人車實時的車速傳輸給可視化界面,實現數據的實時傳輸和顯示。
7、同時速度監測單元還負責判斷無人車的車速是否處于系統設計的操作區間odd內;如果判斷結果為車速在系統設計區間odd內,則速度監測單元發送信號給可視化界面;可視化界面顯示正常行駛;如果判斷結果為無人車車速超出系統設計區間odd,則速度監測單元發送信號給制動系統控制單元,觸發緊急制動程序;制動系統控制單元在接收到超速信號后,向剎車系統發送制動減速指令,并啟動計時器以監測剎車系統的反應時間;計時器用于確保剎車系統能在預設時間內將車速降至安全范圍內;如果無人車在計時器預設時間內成功減速至安全范圍,表明剎車系統工作正常,制動系統控制單元將向可視化界面發送信號,界面隨后顯示車輛恢復正常行駛狀態;如果車速未能在計時器預設時間內降低至安全范圍,則表明剎車系統可能失靈;此時剎車控制系統發送信號給電源緊急切斷系統控制模塊,觸發電源緊急切斷程序;電源緊急切斷控制模塊給電源緊急切斷裝置發送電源切斷指令,以執行緊急制動,確保無人車安全停下。
8、電源緊急切斷裝置接收到來自無人車超速監測與控制模塊發出的電源切斷信號時,立即執行電源切斷操作;這一操作導致無人車失去動力源進而減速,并最終完全停止;此過程實現了緊急制動功能,以防止發生事故。在電源切斷操作完成后,電源緊急切斷裝置進一步將操作完成的信號發送至可視化界面;可視化界面在接收到該信號后,將顯示“車輛故障,電源已切斷”的提示信息;確保了緊急制動過程的透明度,也為用戶提供了即時的反饋,明確指示了車輛當前的狀態和所采取的安全措施。
9、本發明的另一個目的在于提出一種無人車超速檢測與剎車失靈緊急制動方法,通過對磁傳感器的無人車車輪電機實時轉速測量,以及無人車車速超出設計范圍(odd)時的制動進行控制來實現。
10、本發明無人車超速檢測與剎車失靈緊急制動方法包括以下步驟:
11、(1)在無人車車輪電機轉速測量中,將線性霍爾傳感器安裝在電機轉子磁鐵的位置,電機轉子旋轉時,磁場周期性變化,磁場強度的變化導致霍爾電壓vh的周期性變化,得出霍爾電壓vh,線性霍爾傳感器內部的信號處理電路將霍爾電壓放大并轉換為標準的電壓信號輸出,形成周期性波形。
12、(2)霍爾傳感器輸出的周期性電壓信號幅值較小,且包含高頻噪聲如電磁干擾或傳感器內部噪聲。將線性霍爾傳感器輸出的周期性電壓信號輸入到放大濾波電路中,采用運算放大器構成同相或反相放大電路,通過調整反饋電阻rf和輸入電阻rin的阻值,提高周期性電壓信號的幅度,調整霍爾電壓vh的幅值區間;通過調整截至頻率fc,濾除系統中的高頻噪聲如開關噪聲或電磁干擾,同時保留信號的低頻成分即周期性電壓信號;再通過數模轉換器adc將經過濾波的模擬電壓信號轉換為數字信號d(t),以便進行后續的數字信號處理。
13、(3)數據解算與處理模塊對數模轉換器adc轉換后的數字信號d(t)進行小波變換,通過連續小波變換公式分解信號,濾除高頻噪聲并重構信號提取信號中的關鍵特征;其中,d'(t)代表經過小波變換重構后的信號,即除電磁干擾、機械振動噪聲后的電機轉速特征信號;j代表小波分解的層數(尺度層級),取值范圍為j=1,2,…,j,其中j為最大分解層數;a代表尺寸參數,即控制小波函數的伸縮程度,a>0;b代表平移參數,即控制小波函數在時間軸上的位置,b∈r;wj(a,b)代表第j層小波系數,表示信號在尺度a和平移量b下與小波基函數ψj的匹配程度;代表小波基函數,經尺度縮放a和平移b后的母小波函數。
14、(4)數據解算與處理模塊對濾波后的數字信號d'(t)進行256個離散數據點的快速傅里葉變換(fft),將時域信號轉換為頻域信號x(k),獲得信號的頻譜,提取幅值譜|x(k)|中的能量最大的頻率fmax=arg?maxk|x(k)|作為電機轉速的特征頻率。
15、(5)數據解算與處理模塊從fft結果x(k)中提取能量最大的頻率fmax,該頻率點對應電機的瞬時頻率,計算得到電機的實時轉速n,其中p為電機極對數。
16、(6)數據解算與處理模塊將計算得到的電機實時轉速n輸出至無人車超速監測與控制模塊,通過比較實時轉速n與安全閾值nth判斷是否超速,并在超速狀態下根據轉速偏差δn=n-nth計算制動扭矩t=kp·δn+ki·∫δndt實現制動控制;若制動失效,則觸發電源緊急切斷系統。其中,制動控制的過程為:
17、(6.1)速度監測單元從轉速感知模塊接收電機瞬時頻率信息;同時速度監測單元通過通信接口將無人車的實時車速數據傳輸給可視化界面,實現數據的實時顯示。
18、(6.2)速度監測單元根據電機轉速n與車輪半徑r計算車速通過判斷條件vmin≤v≤vmax確定無人車的實時車速是否處于系統設計的設計區間odd內;同時,根據環境感知數據動態調整odd范圍;
19、(6.3)若檢測到v>vmax,則表明車速超出無人車車速設計區間odd,速度監測單元生成超速信號sover=1并發送到控制單元,觸發緊急制動程序,控制剎車壓力遞增,并啟動計時器t。
20、(6.4)制動系統控制單元通過計時器t,監測剎車系統的反應時間tbrake,若tbrake>tmax,則觸發備用制動機制并啟動電源緊急切斷系統,確保剎車系統在預設時間內將車速降至安全區間內。
21、(6.5)若無人車在計時器預設時間內減速至安全區間,制動系統控制單元向可視化界面發送信號,可視化界面顯示車輛恢復正常行駛。
22、(6.6)如果車速未在計時器預設時間內降低至安全范圍,表明剎車系統失靈;制動系統控制單元向電源緊急切斷系統控制單元發送信號,觸發電源緊急切斷程序。
23、(6.7)電源緊急切斷系統控制單元接收到信號后,向電源緊急切斷裝置發送電源切斷指令;電源緊急切斷裝置執行電源切斷操作,使無人車失去動力并逐漸減速直至完全停止。
24、(6.8)電源緊急切斷裝置在執行電源切斷操作后,向可視化界面發送信號,界面顯示“車輛故障,電源已切斷”,通知用戶車輛已進入緊急制動狀態。
25、步驟(1)中,轉子旋轉時,磁場周期性變化,根據霍爾效應,磁場強度的變化導致霍爾電壓vh的周期性變化,其表達式為:
26、
27、其中,i為通過線性霍爾傳感器的電流;b為外加磁場的磁感應強度;rh為霍爾系數;d為材料厚度。
28、步驟(2)中,將線性霍爾傳感器輸出的周期性電壓信號輸入到放大濾波電路中,采用運算放大器構成同相或反相放大電路,放大倍數av為:rf為反饋電阻,rin為輸入電阻。
29、步驟(3)中,數據解算與處理模塊對數模轉換器轉換后的數字信號d(t)進行小波變換,通過公式分解信號;其中,w(a,b)代表信號d(t)在尺度a和平移量b下與小波基函數ψ的匹配度;a代表控制小波函數伸縮程度的尺寸參數,a>0;b代表控制小波函數在時間軸上的位置的平移參數,b∈r;d(t)代表輸入信號,表示霍爾傳感器原始電壓信號;t代表時間變量,代表母小波函數ψ(t)經尺度縮放和平移后的形式。
30、步驟(4)中,數據解算與處理模塊對濾波后的數字信號d'(t)進行快速傅里葉變換,通過公式將時域信號轉換為頻域信號x(k),獲得信號的頻譜。
31、步驟(5)中,數據解算與處理模塊從頻域信號x(k)中提取能量最大的頻率fmax為對應電機的瞬時頻率,通過計算得到電機的實時轉速n,其中,p為電機極對數。
32、有益效果:與現有技術相比,本發明具有以下優點:
33、(1)本發明無人車超速檢測與剎車失靈緊急制動系統中的實時轉速感知模塊通過結合磁傳感器和數據解算與處理模塊,實現了對車輪電機實時轉速的高精度測量,為無人車的速度監測提供了可靠的數據支持。
34、(2)本發明中的無人車超速監測與控制模塊將速度監測、制動控制和電源切斷等功能集成于一體,通過各組件之間的高效協同工作,實現了對無人車速度的全面監控和緊急情況下的有效制動。
35、(3)本發明中的可視化界面為用戶提供了清晰的車輛狀態信息,增強了系統的用戶交互性和信息傳達的及時性,提高了用戶對車輛狀態的了解和控制。
36、(4)在剎車系統失靈的情況下,本發明的電源緊急切斷系統控制單元通過向電源緊急切斷裝置發送電源切斷指令,執行緊急制動,確保無人車安全停下。
37、(5)本發明實現了對無人車實時車速的精確監測、超速情況下的緊急制動觸發以及剎車失靈時的電源緊急切斷功能,解決了目前無人車在行駛過程中出現的超速以及剎車系統失靈的問題,提高了無人車的行駛安全性。
- 還沒有人留言評論。精彩留言會獲得點贊!