基于三步法的汽車底盤域統一橫擺運動控制方法和裝置
本發明屬于車輛底盤協調控制,具體的說是基于三步法的汽車底盤域統一橫擺運動控制方法和裝置。
背景技術:
1、隨著自動駕駛的高度發展,以及車企自主研發的智能輔助駕駛系統的逐漸成熟,在底盤電控基礎之上底盤域架構應運而生并逐步發展,新的底盤域架構及底盤域架構下的底盤控制技術已經成為相關熱點之一。作為車輛動力學控制中非常重要的橫擺控制,基于單一電子系統的控制已經頗為成熟,而針對底盤域架構下的多電子控制系統控制干涉和耦合問題隨著底盤域的發展將會更加突出。
2、針對于橫擺控制來說,主動前輪轉向系統和主動后輪轉向系統在實現期望轉向的同時,由于輪胎的轉向,輪胎力大小會變化,自然會幫助汽車在某些工況下建立附加橫擺力矩;而隨著分布式驅動汽車的發展,四輪由輪轂電機獨立驅動的汽車帶來了更多的可能性,四個輪胎扭矩的獨立控制帶來了每個輪單獨扭矩變化的自由度,隨之興起的是對扭矩矢量控制系統的研究,其通過差動驅動的方式,來對車輛施加附加橫擺力矩,進而幫助轉向。而兩大系統在橫擺問題上,控制目標基本一致,執行機構卻完全不同,兩系統各自的工作區域都受到限制,因此針對橫擺運動的集成控制開發是有必要的。
技術實現思路
1、本發明提供了一種基于三步法的汽車底盤域統一橫擺運動控制方法和裝置,基于l2+及以上級別的智能駕駛需求,提升車輛動態性能和操縱穩定性,解決傳統線控底盤系統中橫擺控制不足的問題。
2、本發明技術方案結合附圖說明如下:
3、第一方面,本發明提供了一種基于三步法的汽車底盤域統一橫擺運動控制方法和裝置,包括以下步驟:
4、計算橫擺目標;
5、獲取傳感器、車輛狀態、路面信息,實現內部信息資源共享;
6、實現對軟硬件的故障失效識別,保證相應行駛的安全;
7、針對四輪轉向分布式驅動電動汽車的汽車,設計基于三步法的底盤域的橫擺穩定集成控制系統,得到橫擺力矩和前后輪轉角附加值,并且將前后輪轉角附加值發送至車輛;
8、對橫擺力矩進行分配,并且分配至四輪執行;
9、執行分配后的橫擺力矩控制指令,以及執行前后輪轉角附加值命令,以實現預期的車輛橫擺動態控制。
10、進一步的,所述計算橫擺目標的具體方法如下:
11、11)設計理想質心側偏角;
12、12)對理想橫擺角速度進行設計,具體如下:
13、計算分布式驅動四輪轉向汽車的前后輪胎側偏角,如下所示:
14、;(1)
15、式中,為前車輪輪胎側偏角;為車輛質心側偏角;為車輛橫擺角速度;為底盤的前軸到車輛質心的距離;為車輛縱向速度;為前輪轉角;為后車輪輪胎側偏角;為車輛的后軸到車輛質心的距離;
16、將公式(1)聯立得到:
17、;(2)
18、上式進一步寫成:
19、;(3)
20、式中,為前后軸之間的距離,;為車輛轉向中心到質心的距離,即為車輛轉向半徑;
21、建立車輛在穩態下,車輛側向及橫擺運動公式,由如下所示:
22、;(4)
23、式中,為車輛質量;為車輛側向加速度;為前軸側向力;為后軸側向力;為車輛繞垂直軸的轉動慣量;為橫擺角加速度;
24、計算前、后軸所受側向力,如下所示:
25、;(5)
26、式中,為前輪側向剛度;為后輪側向剛度;
27、由于穩態下,,,故上式寫成如下形式:
28、;(6)
29、將式(6)以及公式(5)帶入式(3)中得:
30、;(7)
31、上式寫成:
32、;(8)
33、?式中,為汽車的穩定性因數,即:
34、;(9)
35、13)引入不足轉向度因數,如下所示:
36、;(10)
37、故將式(8)轉換為:
38、?;(11)
39、14)將前輪轉角設置為阿克曼轉向角和動態轉角,如下所示:
40、;(12)
41、;(13)
42、;(14)
43、式中,為阿克曼轉向角;為動態轉角;為實際前輪轉向角;
44、15)將式(11)轉換為:
45、;(15)
46、16)將參考橫擺角速度設為:
47、;(16)
48、式中,為參考橫擺角速度;
49、17)將理想橫擺角速度受到約束設為:
50、;(17)
51、式中,為路面附著系數;為重力加速度;0.85為設置的安全系數;
52、18)計算實際的參考橫擺角速度,如下所示:
53、;(18)
54、式中,為拉普拉斯算子;為合適的一階慣性環節時間常數
55、19)引入擬合函數,加入非線性轉向特性擬合曲線計算側向加速度,如下所示:
56、;
57、式中,為線性區的側向加速度極限值;為可實現的最大側向加速度;
58、計算動態前輪轉角,如下所示:
59、;
60、求得設計的理想橫擺角速度如下:
61、。
62、進一步的,獲取傳感器、車輛狀態、路面信息包括獲取橫縱向車速,橫縱向加速度,路面附著系數和輪胎縱側向力。
63、進一步的,所述針對四輪轉向分布式驅動電動汽車的汽車,設計基于三步法的底盤域的橫擺穩定集成控制系統的具體方法如下:
64、41)建立車輛的側向運動和橫擺運動的車輛動力學方程,如下所示:
65、?;(19)
66、;(20)
67、式中,為質心側偏角速度;為橫擺角加速度;為差動驅動帶來的附加橫擺力矩;與為地面對車輛前后輪所在的前軸、后軸側向反作用力;為車輛質量;為車輛的橫擺轉動慣量;
68、42)對前后輪轉角關系進行定義;定義后輪轉角與前輪轉角比例為:
69、;(21)
70、式中,為前輪轉角;為后輪轉角;
71、43)建立前軸側向力和后軸側向力與后輪轉角和前輪轉角的比值關系,具體如下:
72、;(22)
73、式中,為前后軸側向力比例系數;
74、44)將三步法的控制量設為,和;
75、45)根據車輛當前的測量值,計算穩態值,具體如下:
76、令式(19)和(20)中的,,獲得穩態控制輸入量,用,和表示,具體如下:
77、;
78、;
79、;
80、求解出期望的穩態控制輸入,如下所示:
81、;
82、;
83、;
84、式中,為的穩態控制輸入量;為的穩態控制輸入量;的穩態控制輸入量;
85、46)引入參考動力學的前饋控制,考慮質心側偏角和橫擺角速度的瞬態響應,設置控制輸入條件,如下所示:
86、;
87、;
88、;
89、式中,、、為前饋控制量;
90、代入公式(19)、(20)和(22)中,其中、和為前饋控制量;
91、;
92、;
93、;
94、令,解得前饋控制輸入為:
95、;
96、;
97、;
98、47)引入跟蹤誤差反饋控制,設置控制輸入,如下所示:
99、;
100、;
101、;
102、代入公式(19)、(20)和(22)中,其中、和為反饋控制量:
103、;
104、;
105、;
106、將穩態控制和前饋控制輸入用,,和、和的表達,得:
107、;(23)
108、;(24)
109、;(25)
110、定義跟蹤誤差,如下所示:
111、;?;(26)
112、式中,為車輛質心側偏角誤差;為車輛橫擺角速度誤差;為參考質心側偏角;為參考橫擺角速度;
113、則式(23)和式(24)則變為:
114、;(27)
115、;(28)
116、選取一定的控制誤差項即式(26)的質心側偏角和橫擺角速度誤差,使得式(27)和式(28)變為指數漸近穩定的情況;
117、將式(27)以及式(28)同時聯立式(25)寫成如下形式:
118、;(29)
119、;(30)
120、式中,為比例增益;為積分增益;
121、即求得、和的值:
122、;
123、;
124、;
125、48)設置三步法控制器控制律,如下所示:
126、;(31)
127、式中,為控制輸入;為穩態控制項;為前饋控制項;為誤差反饋控制項;并且有:
128、;
129、;
130、;
131、49)在三步法控制律的基礎上,通過解算前后輪的側向力,將橫擺力矩轉化為輪胎轉角和附加力矩輸出,具體如下:
132、解算前,分析前后軸的側向力合力;
133、建立車輛在三個自由度下的運動方程,如下所示:
134、;(32)
135、式中,為車輛總縱向力;為車輛總側向力;與,i=1,2,3,4,分別為車輛兩前輪和兩后輪的縱向力與側向力;為前后輪輪距;為后輪轉角;
136、建立四輪側偏角與四輪轉角的關系,如下所示:
137、;
138、;
139、;
140、;
141、式中,、、、分別為四輪的輪胎側偏角;
142、因此,四輪輪胎側向力表達如下所示:
143、;
144、;
145、;
146、;
147、前后軸的側向力合力表達如下所示:
148、;
149、;
150、故而通過反解上述公式,即得到前后輪轉角決策值:
151、;
152、;
153、式中,為計算得到的前輪轉角值;為計算得到的后輪轉角值,通過駕駛員方向盤轉角與轉向系統傳動比得到前輪轉角名義值,而后輪轉角名義值恒定為0,故而得到最終的前后輪轉角附加值,完成最后的控制輸出,如下所示:
154、;
155、。
156、第二方面,本發明還提供了一種基于三步法的汽車底盤域統一橫擺運動控制裝置,用于實現一種基于三步法的汽車底盤域統一橫擺運動控制方法,包括:
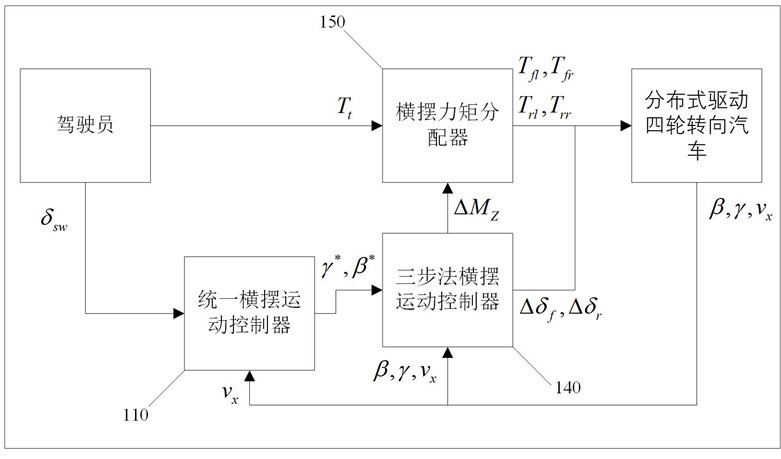
157、統一橫擺運動控制器110,用于計算橫擺目標;
158、環境解析模塊120,用于統一獲取傳感器、車輛狀態、路面信息,實現內部信息資源共享;
159、失效冗余控制模塊130,用于應對軟硬件的故障失效識別,保證相應行駛的安全;
160、子功能控制模塊140,用于針對四輪轉向分布式驅動電動汽車的汽車,設計基于三步法的底盤域的橫擺穩定集成控制系統,得到橫擺力矩和前后輪轉角附加值,并且將前后輪轉角附加值發送至車輛;
161、輸出仲裁模塊150,用于對附加橫擺力矩進行分配,并且分配至四輪執行;
162、執行器160,用于執行分配后的橫擺力矩控制指令,以及執行前后輪轉角附加值命令,以實現預期的車輛橫擺動態控制。
163、本發明的有益效果為:
164、1)本發明有利于各自獨立系統的取長補短,綜合子系統功能共同決策避免協調問題出現,同時保留獨立的控制算法,既避免了失效問題還保留了子系統獨立工作的能力,提升了汽車的穩定裕度與操縱穩定性,簡化了汽車電子電氣架構的同時,對車內線束冗雜和各控制器紛繁復雜且相互獨立提出了一種可行的解決方案;
165、2)本發明針對橫擺運動的統一理想橫擺目標,取代原有的簡單線性轉向特性,重新引入擬合函數,加入非線性轉向特性擬合曲線,理想目標變化趨勢更為貼近車輛的基本轉向特性曲線,故而底盤域橫擺控制算法能夠更好的貼近理想目標從而更好的提升車輛的動態性能和操縱穩定性。
- 還沒有人留言評論。精彩留言會獲得點贊!