車輛扭矩的控制方法、控制裝置、車輛及存儲(chǔ)介質(zhì)與流程
本技術(shù)涉及車輛領(lǐng)域,并且更具體地,涉及車輛領(lǐng)域中一種車輛扭矩的控制方法、控制裝置、車輛及存儲(chǔ)介質(zhì)。
背景技術(shù):
1、在車輛的行駛過(guò)程中,通常會(huì)使用比例-積分控制器(proportional?integralcontroller,pi控制器)實(shí)現(xiàn)對(duì)驅(qū)動(dòng)系統(tǒng)的電機(jī)扭矩的精確控制,確保發(fā)動(dòng)機(jī)或電機(jī)輸出的實(shí)際扭矩能夠精確跟蹤駕駛員需求的目標(biāo)扭矩,并且保持車機(jī)系統(tǒng)的穩(wěn)定性。
2、在車輛的駕駛模式或擋位信息發(fā)生變化時(shí),由于車輛持續(xù)滿足pi控制器工作的預(yù)設(shè)條件,且缺乏有效的退出機(jī)制,導(dǎo)致pi控制無(wú)法正常退出,導(dǎo)致電機(jī)扭矩存在參數(shù)跳變的問(wèn)題,進(jìn)而還會(huì)導(dǎo)致車輛出現(xiàn)異響,影響車輛的正常行駛。
3、因此,如何在車輛模式轉(zhuǎn)換過(guò)程中保持電機(jī)扭矩平穩(wěn)地輸出是亟待解決的問(wèn)題。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)提供了一種車輛扭矩的控制方法、控制裝置、車輛及存儲(chǔ)介質(zhì),該方法能夠通過(guò)控制pi控制器對(duì)電機(jī)扭矩的調(diào)節(jié)策略,以使得在車輛模式轉(zhuǎn)換過(guò)程中電機(jī)扭矩平穩(wěn)地輸出。
2、第一方面,提供了一種車輛扭矩的控制方法,該方法包括:
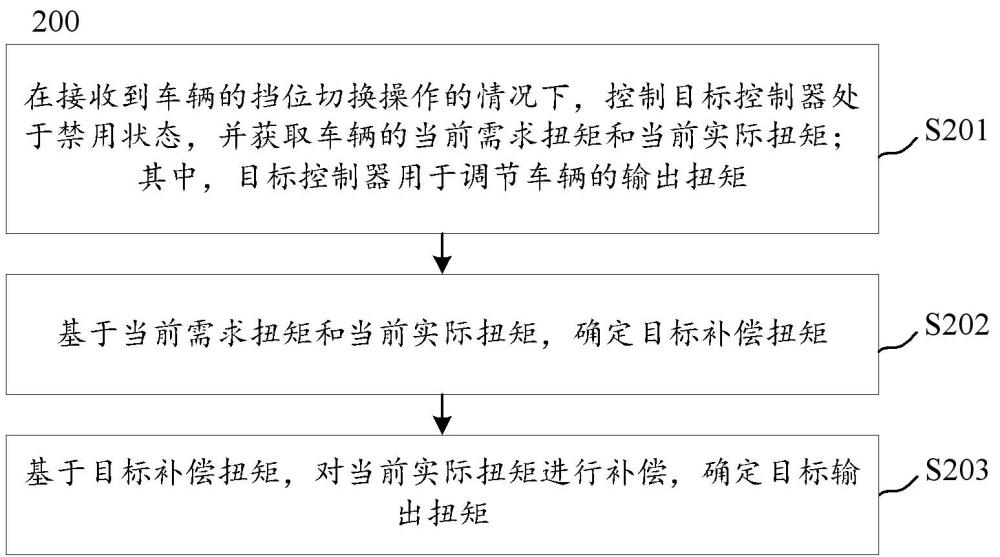
3、在接收到車輛的擋位切換操作的情況下,控制目標(biāo)控制器處于禁用狀態(tài),并獲取車輛的當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩;其中,目標(biāo)控制器用于調(diào)節(jié)車輛的輸出扭矩;
4、基于當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩,確定目標(biāo)補(bǔ)償扭矩;
5、基于目標(biāo)補(bǔ)償扭矩,對(duì)當(dāng)前實(shí)際扭矩進(jìn)行補(bǔ)償,確定目標(biāo)輸出扭矩。
6、上述技術(shù)方案中,當(dāng)接收到車輛的擋位切換操作時(shí),控制目標(biāo)控制器為禁用狀態(tài);并基于車輛當(dāng)前的需求扭矩和當(dāng)前實(shí)際扭矩,確定出目標(biāo)補(bǔ)償扭矩,對(duì)當(dāng)前實(shí)際扭矩進(jìn)行補(bǔ)償,以得到目標(biāo)輸出扭矩,對(duì)車輛進(jìn)行控制。該方法為目標(biāo)控制器設(shè)定退出機(jī)制,在檢測(cè)到擋位切換操作時(shí),不采用目標(biāo)控制器進(jìn)行扭矩調(diào)節(jié),避免在擋位切換或者車輛模式切換過(guò)程中目標(biāo)控制器存在響應(yīng)滯后或過(guò)度調(diào)節(jié)的問(wèn)題,導(dǎo)致電機(jī)扭矩存在跳變,從而造成系統(tǒng)存在異響;在禁用目標(biāo)控制器之后,直接根據(jù)實(shí)際工況進(jìn)行扭矩補(bǔ)償,以此接替目標(biāo)控制器的調(diào)節(jié)策略,既可以避免目標(biāo)控制器進(jìn)行扭矩調(diào)節(jié)可能造成的扭矩波動(dòng),也可以為車輛提供所需的補(bǔ)償扭矩,進(jìn)一步保證車輛動(dòng)力輸出的平穩(wěn)性。
7、結(jié)合第一方面,在某些可能的實(shí)現(xiàn)方式中,該方法還包括:獲取車輛的行駛數(shù)據(jù)和踏板開(kāi)度信息;基于行駛數(shù)據(jù)和踏板開(kāi)度信息,確定車輛的當(dāng)前需求扭矩和當(dāng)前理論扭矩。
8、上述技術(shù)方案中,結(jié)合車輛的行駛數(shù)據(jù)和踏板開(kāi)度信息,分析車輛當(dāng)前工況對(duì)應(yīng)的當(dāng)前需求扭矩和當(dāng)前理論扭矩。踏板開(kāi)度直接反映駕駛員對(duì)車輛動(dòng)力的需求,通過(guò)獲取踏板開(kāi)度信息,并結(jié)合行駛數(shù)據(jù)來(lái)確定當(dāng)前需求扭矩,提高當(dāng)前需求扭矩的準(zhǔn)確性,使得車輛控制系統(tǒng)能夠更精準(zhǔn)地理解駕駛員的意圖。結(jié)合行駛數(shù)據(jù)與踏板開(kāi)度確定當(dāng)前理論扭矩,可以提高當(dāng)前理論扭矩的準(zhǔn)確性;在根據(jù)當(dāng)前需求扭矩和當(dāng)前理論扭矩對(duì)車輛進(jìn)行控制的過(guò)程中,可以使得扭矩控制更加符合駕駛員需求以及充分發(fā)揮車輛的動(dòng)力性能。
9、結(jié)合第一方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該方法還包括:基于當(dāng)前需求扭矩、當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩,確定目標(biāo)控制器的目標(biāo)狀態(tài);在目標(biāo)狀態(tài)為正常運(yùn)行狀態(tài)或者等待退出狀態(tài)的情況下,基于目標(biāo)控制器對(duì)當(dāng)前實(shí)際扭矩進(jìn)行調(diào)節(jié),將調(diào)節(jié)后的當(dāng)前實(shí)際扭矩確定為目標(biāo)輸出扭矩。
10、上述技術(shù)方案中,根據(jù)車輛的當(dāng)前需求扭矩、當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩,確定出目標(biāo)控制器的目標(biāo)狀態(tài);當(dāng)目標(biāo)控制器的目標(biāo)狀態(tài)為正常運(yùn)行狀態(tài)或者等待退出狀態(tài)時(shí),通過(guò)目標(biāo)控制器進(jìn)行扭矩調(diào)節(jié),確定目標(biāo)輸出扭矩。通過(guò)準(zhǔn)確的扭矩?cái)?shù)據(jù)對(duì)目標(biāo)控制器進(jìn)行控制,使得目標(biāo)控制器可以更精準(zhǔn)及時(shí)地根據(jù)車輛實(shí)際運(yùn)行情況和駕駛員需求,對(duì)當(dāng)前實(shí)際扭矩進(jìn)行調(diào)節(jié),從而確保最終輸出的目標(biāo)扭矩更加精確,有效減少因扭矩波動(dòng)引發(fā)的車輛頓挫。
11、結(jié)合第一方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,基于當(dāng)前需求扭矩、當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩,確定目標(biāo)控制器的目標(biāo)狀態(tài),包括:在當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩的第一差值大于或者等于第一差值閾值的情況下,確定目標(biāo)控制器的目標(biāo)狀態(tài)為正常運(yùn)行狀態(tài);在當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩的第二差值大于或者等于第二差值閾值的情況下,確定目標(biāo)控制器的目標(biāo)狀態(tài)為等待退出狀態(tài)。
12、上述技術(shù)方案中,當(dāng)當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩的第一差值大于或等于第一差值閾值時(shí),將目標(biāo)控制器設(shè)為正常運(yùn)行狀態(tài),確保當(dāng)實(shí)際扭矩偏離理論扭矩達(dá)到一定程度時(shí),目標(biāo)控制器迅速介入,促使實(shí)際扭矩向理論扭矩靠攏,保證車輛動(dòng)力輸出符合預(yù)期工況,實(shí)現(xiàn)精準(zhǔn)的扭矩控制。當(dāng)當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩的第二差值大于或等于第二差值閾值時(shí),目標(biāo)控制器進(jìn)入等待退出狀態(tài);若實(shí)際扭矩與需求扭矩差距過(guò)大,目標(biāo)控制器準(zhǔn)備退出當(dāng)前控制模式,以便系統(tǒng)能快速響應(yīng),調(diào)整扭矩輸出,滿足駕駛員的加速需求。
13、結(jié)合第一方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該方法還包括:在當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩的第二差值小于第二差值閾值的情況下,獲取預(yù)設(shè)延遲時(shí)長(zhǎng);基于預(yù)設(shè)延遲時(shí)長(zhǎng),控制目標(biāo)控制器處于退出狀態(tài)。
14、上述技術(shù)方案中,在檢測(cè)到當(dāng)前需求扭矩與當(dāng)前實(shí)際扭矩之間的第二差值小于第二差值閾值時(shí),通過(guò)設(shè)置預(yù)設(shè)延遲時(shí)長(zhǎng),讓目標(biāo)控制器在預(yù)設(shè)延遲時(shí)長(zhǎng)內(nèi)繼續(xù)對(duì)扭矩進(jìn)行微調(diào),確保實(shí)際扭矩平穩(wěn)地達(dá)到需求扭矩,之后再退出控制,有效避免目標(biāo)控制器立即退出導(dǎo)致電機(jī)扭矩突變,進(jìn)而造成車輛出現(xiàn)頓挫感,提升駕駛的平順性和舒適性。
15、結(jié)合第一方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該方法還包括:在檢測(cè)到擋位信號(hào)的上升沿的情況下,確定接收到車輛的擋位切換操作。
16、上述技術(shù)方案中,在電子控制系統(tǒng)中,信號(hào)的上升沿是明確且易于識(shí)別的特征點(diǎn)。利用擋位信號(hào)的上升沿來(lái)檢測(cè)擋位切換操作,能精準(zhǔn)界定擋位切換發(fā)生的時(shí)刻;從而可以更加及時(shí)的對(duì)目標(biāo)控制器進(jìn)行控制,避免由于識(shí)別延遲造成扭矩調(diào)節(jié)不及時(shí),而導(dǎo)致車輛存在扭矩突變的問(wèn)題,進(jìn)一步保證車輛在擋位切換過(guò)程中扭矩輸出的平穩(wěn)性。
17、結(jié)合第一方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該方法還包括:在目標(biāo)控制器處于禁用狀態(tài)的時(shí)長(zhǎng)達(dá)到時(shí)長(zhǎng)閾值的情況下,控制目標(biāo)控制器退出禁用狀態(tài)。
18、上述技術(shù)方案中,在擋位切換等操作導(dǎo)致目標(biāo)控制器禁用后,若沒(méi)有時(shí)間限制,可能因某些異常情況使控制器一直無(wú)法工作,影響車輛正常運(yùn)行。通過(guò)設(shè)定時(shí)長(zhǎng)閾值,可以在適當(dāng)?shù)臅r(shí)候自動(dòng)恢復(fù)其功能,確保車輛扭矩控制系統(tǒng)始終保持可運(yùn)行狀態(tài);使車輛盡快恢復(fù)正常的扭矩調(diào)節(jié)功能,提升駕駛的平順性和舒適性。
19、第二方面,提供了一種車輛扭矩的控制裝置,該控制裝置包括:
20、控制模塊,用于在接收到車輛的擋位切換操作的情況下,控制目標(biāo)控制器處于禁用狀態(tài),并獲取車輛的當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩;其中,目標(biāo)控制器用于調(diào)節(jié)車輛的輸出扭矩;
21、第一確定模塊,用于基于當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩,確定目標(biāo)補(bǔ)償扭矩;
22、第二確定模塊,用于基于目標(biāo)補(bǔ)償扭矩,對(duì)當(dāng)前實(shí)際扭矩進(jìn)行補(bǔ)償,確定目標(biāo)輸出扭矩。
23、結(jié)合第二方面,在某些可能的實(shí)現(xiàn)方式中,該控制裝置還用于獲取車輛的行駛數(shù)據(jù)和踏板開(kāi)度信息;基于行駛數(shù)據(jù)和踏板開(kāi)度信息,確定車輛的當(dāng)前需求扭矩和當(dāng)前理論扭矩。
24、結(jié)合第二方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該控制裝置還用于基于當(dāng)前需求扭矩、當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩,確定目標(biāo)控制器的目標(biāo)狀態(tài);在目標(biāo)狀態(tài)為正常運(yùn)行狀態(tài)或者等待退出狀態(tài)的情況下,基于目標(biāo)控制器對(duì)當(dāng)前實(shí)際扭矩進(jìn)行調(diào)節(jié),將調(diào)節(jié)后的當(dāng)前實(shí)際扭矩確定為目標(biāo)輸出扭矩。
25、結(jié)合第二方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該控制裝置還用于在當(dāng)前理論扭矩和當(dāng)前實(shí)際扭矩的第一差值大于或者等于第一差值閾值的情況下,確定目標(biāo)控制器的目標(biāo)狀態(tài)為正常運(yùn)行狀態(tài);在當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩的第二差值大于或者等于第二差值閾值的情況下,確定目標(biāo)控制器的目標(biāo)狀態(tài)為等待退出狀態(tài)。
26、結(jié)合第二方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該控制裝置還用于在當(dāng)前需求扭矩和當(dāng)前實(shí)際扭矩的第二差值小于第二差值閾值的情況下,獲取預(yù)設(shè)延遲時(shí)長(zhǎng);基于預(yù)設(shè)延遲時(shí)長(zhǎng),控制目標(biāo)控制器處于退出狀態(tài)。
27、結(jié)合第二方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該控制裝置還用于在檢測(cè)到擋位信號(hào)的上升沿的情況下,確定接收到車輛的擋位切換操作。
28、結(jié)合第二方面和上述實(shí)現(xiàn)方式,在某些可能的實(shí)現(xiàn)方式中,該控制裝置還用于在目標(biāo)控制器處于禁用狀態(tài)的時(shí)長(zhǎng)達(dá)到時(shí)長(zhǎng)閾值的情況下,控制目標(biāo)控制器退出禁用狀態(tài)。
29、第三方面,提供了一種車輛,包括存儲(chǔ)器和處理器。該存儲(chǔ)器用于存儲(chǔ)可執(zhí)行程序代碼,該處理器用于從存儲(chǔ)器中調(diào)用并運(yùn)行該可執(zhí)行程序代碼,使得該車輛執(zhí)行上述第一方面或第一方面任意一種可能的實(shí)現(xiàn)方式中的方法。
30、第四方面,提供了一種計(jì)算機(jī)程序產(chǎn)品,該計(jì)算機(jī)程序產(chǎn)品包括:計(jì)算機(jī)程序代碼,當(dāng)該計(jì)算機(jī)程序代碼在計(jì)算機(jī)上運(yùn)行時(shí),使得該計(jì)算機(jī)執(zhí)行上述第一方面或第一方面任意一種可能的實(shí)現(xiàn)方式中的方法。
31、第五方面,提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),該計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有計(jì)算機(jī)程序代碼,當(dāng)該計(jì)算機(jī)程序代碼在計(jì)算機(jī)上運(yùn)行時(shí),使得該計(jì)算機(jī)執(zhí)行上述第一方面或第一方面任意一種可能的實(shí)現(xiàn)方式中的方法。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!