一種掛車列車、轉(zhuǎn)彎信息檢測方法、電子設(shè)備及存儲介質(zhì)與流程
本技術(shù)涉及車輛檢測,特別涉及一種掛車列車、轉(zhuǎn)彎信息檢測方法、電子設(shè)備及存儲介質(zhì)。
背景技術(shù):
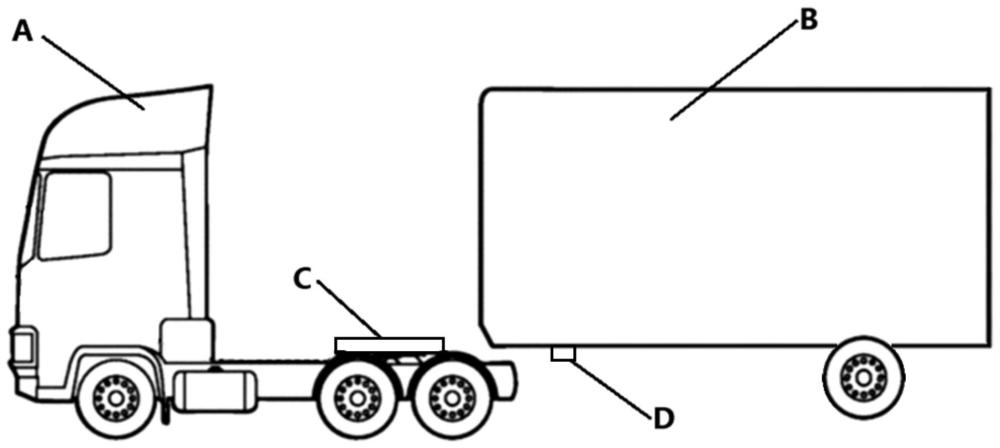
1、掛車列車廣泛應(yīng)用于物流運輸領(lǐng)域,掛車列車包括牽引車和半掛車。半掛車的前端安裝有牽引銷,牽引車的后端安裝有牽引盤;在連接時,半掛車的牽引銷插入牽引車的牽引盤中。
2、隨著科技的發(fā)展以及新能源汽車產(chǎn)業(yè)發(fā)展規(guī)劃的推進,掛車列車的智能駕駛程度越來越高,而智能駕駛就需要實時獲取掛車列車的各種運行狀態(tài),牽引車與半掛車之間的轉(zhuǎn)彎信息就是其中非常重要的參數(shù)。
3、在相關(guān)技術(shù)中,通常采用激光雷達、超聲雷達、無線定位、拉線傳感器以及圖像識別等方式來檢測牽引車與半掛車之間的轉(zhuǎn)彎信息。然而,這些技術(shù)存在明顯的缺陷:一方面,掛車列車的運行環(huán)境較為嚴苛,存在雨水、污漬、灰塵乃至金屬碎屑等污染源,這些傳感器需要經(jīng)常性人工維護清潔的缺陷。一旦清潔不及時,這些污染源會影響傳感器的性能,導(dǎo)致誤判、失效甚至失靈。另一方面,上述傳感器大多存在成本高昂的問題,難以廣泛推廣和普及。此外,上述傳感器對環(huán)境適應(yīng)性較弱,容易受到溫度、濕度等環(huán)境因素的影響。
4、因此,如何在降低外部環(huán)境干擾的前提下,低成本且高效地檢測掛車列車的轉(zhuǎn)彎信息是本領(lǐng)域技術(shù)人員目前需要解決的技術(shù)問題。
技術(shù)實現(xiàn)思路
1、本技術(shù)的目的是提供一種掛車列車、一種轉(zhuǎn)彎信息檢測方法及一種電子設(shè)備,能夠在降低外部環(huán)境干擾的前提下,低成本且高效地檢測掛車列車的轉(zhuǎn)彎信息。
2、為解決上述技術(shù)問題,本技術(shù)提供一種掛車列車,所述掛車列車包括轉(zhuǎn)角監(jiān)測裝置、牽引車和半掛車,所述半掛車的牽引銷與所述牽引車的牽引盤相配合以實現(xiàn)連接,所述半掛車的底盤上設(shè)置有至少一個傳感器,所述傳感器的測量值由所述傳感器與所述牽引盤的位置關(guān)系確定;
3、所述轉(zhuǎn)角監(jiān)測裝置用于獲取所述傳感器的測量值,并根據(jù)所述測量值確定所述掛車列車的轉(zhuǎn)彎信息;其中,所述轉(zhuǎn)彎信息為用于描述所述牽引車相對于所述半掛車的轉(zhuǎn)彎角度和/或轉(zhuǎn)彎方向的信息。
4、可選的,所述傳感器為用于輸出模擬量信號或開關(guān)量信號的接近式傳感器。
5、可選的,若所述傳感器為用于輸出開關(guān)量信號的接近式傳感器,則所述轉(zhuǎn)角監(jiān)測裝置根據(jù)所述測量值確定所述掛車列車的轉(zhuǎn)彎信息的過程包括:
6、根據(jù)所述測量值確定所述接近式傳感器的狀態(tài)變換序列,并根據(jù)所述狀態(tài)變換序列確定所述掛車列車的轉(zhuǎn)彎信息;其中,在所述掛車列車轉(zhuǎn)彎的過程中所述接近式傳感器在第一狀態(tài)和第二狀態(tài)之間切換,第一狀態(tài)為所述接近式傳感器的檢測區(qū)域未被所述牽引盤遮擋的狀態(tài),第二狀態(tài)為所述接近式傳感器的檢測區(qū)域被所述牽引盤遮擋的狀態(tài),所述狀態(tài)變換序列用于描述所述接近式傳感器在第一狀態(tài)和第二狀態(tài)之間切換的順序。
7、可選的,所述牽引盤為鞍座形的牽引盤,所述半掛車的底盤上與所述牽引盤的喇叭口對應(yīng)的位置設(shè)置有至少一個第一安裝孔,所述第一安裝孔中設(shè)置有第一接近式傳感器;在所述牽引車的轉(zhuǎn)彎角度為0時所有所述第一接近式傳感器的檢測區(qū)域均未被所述牽引盤遮擋,在所述牽引車的轉(zhuǎn)彎角度大于預(yù)設(shè)值時至少一個所述第一接近式傳感器的檢測區(qū)域被所述牽引盤遮擋;
8、相應(yīng)的,所述轉(zhuǎn)角監(jiān)測裝置根據(jù)所述狀態(tài)變換序列確定所述掛車列車的轉(zhuǎn)彎信息的過程包括:
9、根據(jù)所述狀態(tài)變換序列確定所述第一接近式傳感器的當前狀態(tài);若所有所述第一接近式傳感器在當前均處于第一狀態(tài),則判定所述牽引車的轉(zhuǎn)彎角度為0;若至少一個所述第一接近式傳感器在當前處于第二狀態(tài),則判定所述牽引車的轉(zhuǎn)彎角度大于所述預(yù)設(shè)值。
10、可選的,所述半掛車的底盤上設(shè)置有n個第二安裝孔和n個第三安裝孔,所述第二安裝孔中設(shè)置有第二接近式傳感器,所述第三安裝孔中設(shè)置有第三接近式傳感器,在所述牽引車的轉(zhuǎn)彎角度為0時所有所述第二接近式傳感器和所有所述第三接近式傳感器的檢測區(qū)域均被所述牽引盤遮擋,在所述牽引車左轉(zhuǎn)且轉(zhuǎn)彎角度大于時第i個第二接近式傳感器的檢測區(qū)域未被所述牽引盤遮擋,在所述掛車列車右轉(zhuǎn)且轉(zhuǎn)彎角度大于時第i個第三接近式傳感器的檢測區(qū)域未被所述牽引盤遮擋,i為接近式傳感器的序號,1≤i≤n;
11、相應(yīng)的,所述轉(zhuǎn)角監(jiān)測裝置根據(jù)所述狀態(tài)變換序列確定所述掛車列車的轉(zhuǎn)彎信息的過程包括:根據(jù)所述狀態(tài)變換序列判斷所述第二接近式傳感器和所述第三接近式傳感器在當前是否均處于所述第二狀態(tài);若是,則判定所述牽引車的轉(zhuǎn)彎角度為0;若否,則根據(jù)處于所述第一狀態(tài)的第二接近式傳感器或第三接近式傳感器的序號確定所述牽引車的轉(zhuǎn)彎角度和轉(zhuǎn)彎方向。
12、可選的,所述牽引盤包括輔助檢測結(jié)構(gòu),所述輔助檢測結(jié)構(gòu)上設(shè)置有多個通孔,每一所述通孔與所述牽引盤的旋轉(zhuǎn)中心的距離均相同,所述半掛車的底盤上設(shè)置有至少一個第四安裝孔,所有所述第四安裝孔中至少設(shè)置有兩個第四接近式傳感器,在所述掛車列車轉(zhuǎn)彎的過程中所述輔助檢測結(jié)構(gòu)上的通孔依次經(jīng)過所述第四接近式傳感器的檢測區(qū)域,所述通孔的面積大于所述第四接近式傳感器的檢測區(qū)域的面積。
13、可選的,所述第四接近式傳感器的總數(shù)量為2,在所述牽引車的轉(zhuǎn)彎角度為0時兩個所述第四接近式傳感器的檢測區(qū)域均不被所述輔助檢測結(jié)構(gòu)遮擋,在所述牽引車的轉(zhuǎn)彎角度大于0時至少一個所述第四接近式傳感器的檢測區(qū)域被所述輔助檢測結(jié)構(gòu)遮擋。
14、可選的,所述第四接近式傳感器的總數(shù)量為2,在所述牽引車的轉(zhuǎn)彎角度為0時兩個所述第四接近式傳感器的檢測區(qū)域均被所述輔助檢測結(jié)構(gòu)遮擋,在所述牽引車的轉(zhuǎn)彎角度大于0時至少一個所述第四接近式傳感器的檢測區(qū)域不被所述輔助檢測結(jié)構(gòu)遮擋。
15、可選的,所述牽引盤上設(shè)置有至少一個條狀遮擋片,所述半掛車的底盤上設(shè)置有至少一個第五安裝孔,所述第五安裝孔中設(shè)置有第五接近式傳感器,在所述掛車列車轉(zhuǎn)彎的過程中,所述條狀遮擋片經(jīng)過所述第五接近式傳感器的檢測區(qū)域。
16、本技術(shù)還提供了一種轉(zhuǎn)彎信息檢測方法,應(yīng)用于掛車列車的轉(zhuǎn)角監(jiān)測裝置,所述掛車列車還包括牽引車和半掛車,所述半掛車的牽引銷與所述牽引車的牽引盤相配合以實現(xiàn)連接,所述半掛車的底盤上設(shè)置有至少一個傳感器,所述傳感器的測量值由所述傳感器與所述牽引盤的位置關(guān)系確定,所述轉(zhuǎn)彎信息檢測方法包括:
17、獲取所述傳感器的測量值;
18、根據(jù)所述測量值確定所述掛車列車的轉(zhuǎn)彎信息;其中,所述轉(zhuǎn)彎信息為用于描述所述牽引車相對于所述半掛車的轉(zhuǎn)彎角度和/或轉(zhuǎn)彎方向的信息。
19、可選的,若所述傳感器為用于輸出模擬量信號的接近式傳感器,則根據(jù)所述測量值確定所述掛車列車的轉(zhuǎn)彎信息,包括:
20、若所述接近式傳感器的測量值大于距離閾值,則判定所述接近式傳感器處于第一狀態(tài);
21、若所述接近式傳感器的測量值小于或等于所述距離閾值,則判定所述接近式傳感器處于第二狀態(tài);
22、確定所述接近式傳感器的狀態(tài)變換序列,并根據(jù)所述狀態(tài)變換序列確定所述掛車列車的轉(zhuǎn)彎信息。
23、可選的,若所述傳感器為用于輸出開關(guān)量信號的接近式傳感器,則根據(jù)所述測量值確定所述掛車列車的轉(zhuǎn)彎信息,包括:
24、若所述接近式傳感器的測量值為0,則判定所述接近式傳感器處于第一狀態(tài);
25、若所述接近式傳感器的測量值為1,則判定所述接近式傳感器處于第二狀態(tài);
26、確定所述接近式傳感器的狀態(tài)變換序列,并根據(jù)所述狀態(tài)變換序列確定所述掛車列車的轉(zhuǎn)彎信息。
27、可選的,在根據(jù)所述狀態(tài)變換序列確定所述掛車列車的轉(zhuǎn)彎信息之后,還包括:
28、判斷所述牽引車相對于所述半掛車的轉(zhuǎn)彎角度是否大于臨界值;
29、若是,則輸出提示信息。
30、本技術(shù)還提供了一種電子設(shè)備,包括存儲器和處理器,所述存儲器中存儲有計算機程序,所述處理器調(diào)用所述存儲器中的計算機程序時實現(xiàn)上述轉(zhuǎn)彎信息檢測方法的步驟。
31、本技術(shù)還提供了一種存儲介質(zhì),其上存儲有計算機程序,所述計算機程序執(zhí)行時實現(xiàn)上述轉(zhuǎn)彎信息檢測方法執(zhí)行的步驟。
32、本技術(shù)提供了一種掛車列車,該掛車列車包括轉(zhuǎn)角監(jiān)測裝置、牽引車和半掛車,半掛車的底盤上設(shè)置有至少一個傳感器,在所述掛車列車轉(zhuǎn)彎的過程中所述傳感器根據(jù)自身與所述牽引盤的位置關(guān)系生成測量值。當牽引車轉(zhuǎn)彎時,牽引盤隨牽引車同步轉(zhuǎn)動,從而產(chǎn)生變化的測量值。轉(zhuǎn)角監(jiān)測裝置可以根據(jù)傳感器的測量值確定牽引車相對于半掛車的轉(zhuǎn)彎角度和/或轉(zhuǎn)彎方向。上述基于傳感器與牽引盤的位置關(guān)系的轉(zhuǎn)彎信息檢測方式,避免了復(fù)雜的數(shù)據(jù)處理或信號解析,提高了檢測效率。牽引盤與半掛車底盤的相對運動會產(chǎn)生摩擦,傳感器安裝在半掛車底盤上,牽引盤轉(zhuǎn)動時可以自動清除傳感器表面的雜物(如灰塵、污漬等),保持傳感器清潔,減少外部環(huán)境對檢測結(jié)果的干擾。因此,本技術(shù)能夠在降低外部環(huán)境干擾的前提下,低成本且高效地檢測掛車列車的轉(zhuǎn)彎信息。本技術(shù)同時還提供了一種轉(zhuǎn)彎信息檢測裝置和一種電子設(shè)備,具有上述有益效果,在此不再贅述。
- 還沒有人留言評論。精彩留言會獲得點贊!