一種爬壁機器人
本發明屬于自動化機器人,具體地涉及一種爬壁機器人。
背景技術:
1、在飛機制造與維護等作業場景中,對作業效率與安全性一直是有著極高的要求。傳統作業依賴人工攜帶設備在機身表面操作,不僅人工操作安全性低,而且移動速度緩慢,在機翼過渡區等曲面部位還容易因設備定位不準導致重復作業。雖然現有爬壁機器人替代了部分人力,但在實際應用中仍存在明顯缺陷:
2、現有技術中,多數爬壁機器人采用固定式真空吸盤組,當遇到機身與機翼連接處的曲率突變時,容易因局部漏氣觸發安全警報,迫使設備退回平坦區域重新定位。其移動機構多采用單一驅動模式,例如僅配置全向輪的設備在縱向曲面上移動時,常出現“打滑-制動”的反復循環,導致定位精度下降。更突出的問題是,當作業需要從垂尾向平尾區域轉移時,現有設備往往需要人工遙控調整重心,過程中至少中斷作業10-15分鐘。此外,部分廠商為提升負載能力采用金屬框架結構,使得整機重量超過40kg,在移動時對機翼表面造成明顯形變,反而影響作業質量。
技術實現思路
1、本發明就是針對上述問題,彌補現有技術的不足,提供一種爬壁機器人;本發明能適應復雜曲面,實現在曲面上的靈活移動,并且顯著減輕了人力負擔,提高了作業精度與效率,確保了作業連續性與質量,有效降低了操作難度,提升了作業安全性。
2、為實現上述目的,本發明采用如下技術方案。
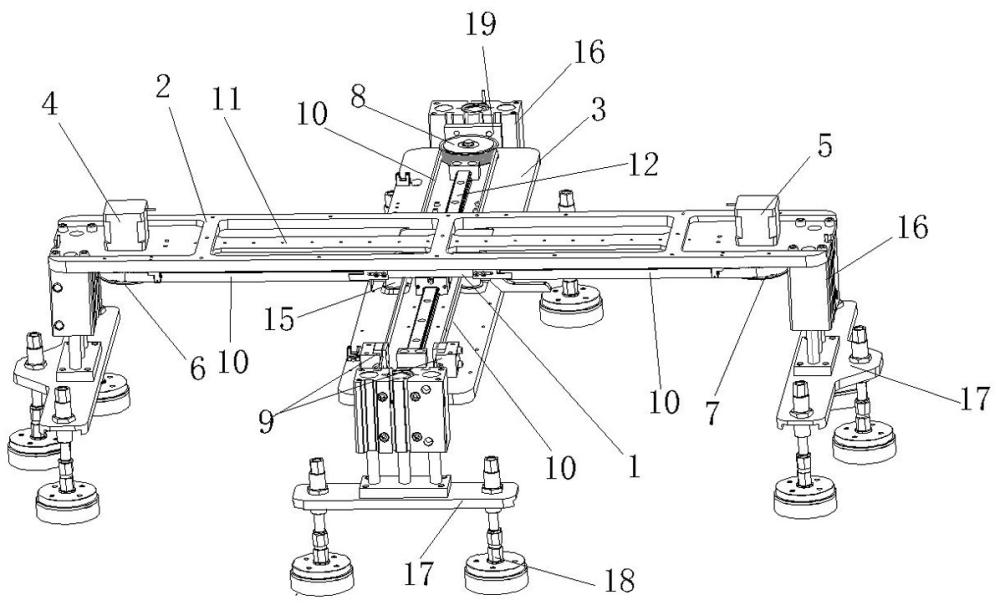
3、本發明提供一種爬壁機器人,包括中心連接板,其特征在于,所述中心連接板上下側分別配合設置有x軸移動板和y軸移動板,所述x軸移動板和所述y軸移動板能夠分別在所述中心連接板上沿x軸和y軸移動,所述x軸移動板兩端分別設置有第一驅動電機和第二驅動電機,所述第一驅動電機的輸出軸連接有第一帶齒驅動輪,所述第二驅動電機的輸出軸連接有第二帶齒驅動輪,所述y軸移動板上兩側分別設置有帶齒輔助輪和皮帶張緊裝置,傳送齒形帶的兩端均與所述皮帶張緊裝置連接,所述傳送齒形帶同時繞在所述第一帶齒驅動輪、所述帶齒輔助輪和所述第二帶齒驅動輪上,所述x軸移動板兩端和所述y軸移動板兩端均連接有升降吸盤機構。
4、進一步地,所述x軸移動板下方連接有x軸導軌,所述y軸移動板上方連接有y軸導軌,所述中心連接板上對應所述x軸導軌設置有x軸滑塊,所述x軸滑塊被限制在所述x軸導軌上,使所述x軸移動板與所述中心連接板相互連接,對應所述y軸導軌設置有y軸滑塊,所述y軸滑塊被限制在所述y軸導軌上,使所述y軸移動板與所述中心連接板相互連接,所述x軸移動板通過所述x軸導軌與所述x軸滑塊的相互滑動在所述中心連接板上沿x軸滑動,所述y軸移動板通過所述y軸導軌與所述y軸滑塊的相互滑動在所述中心連接板上沿y軸滑動。
5、進一步地,所述中心連接板下側四角設置有四個張緊輪,所述傳送齒形帶經過所述張緊輪后,構成十字結構。
6、進一步地,所述升降吸盤機構包括升降氣缸、吸盤連接板和真空吸盤,所述升降氣缸的伸縮桿與所述吸盤連接板連接,所述真空吸盤連接在所述吸盤連接桿下方。
7、更進一步地,對應所述x軸移動板的所述升降氣缸通過螺栓連接在所述x軸移動板的兩端下方,所述y軸移動板的兩端側方設置有加固連接板,對應所述y軸移動板的所述升降氣缸連接在所述加固連接板側方,以彌補x軸移動板與y軸移動板之間存在的高度差異。
8、更進一步地,每個所述升降吸盤機構的所述真空吸盤至少為兩個。
9、本發明的有益效果。
10、本發明采用了x軸和y軸獨立的移動區域設計,配合精密導軌和張緊機制,能夠實現高精度的平穩無級移動,確保機器在復雜曲面上的定位和作業精度;增強了吸附作業中的穩定性,能夠在垂直或傾斜面上保持穩固的吸附效果,適應多種工作環境;通過驅動電機帶動皮帶輪,實現了沿x軸和y軸的平穩無級移動,不僅提高了移動的靈活性,還降低了能耗和噪音,為使用者提供了更加舒適的工作環境;減少了對人工操作的依賴,降低了人力成本,并且提高了作業的安全性和效率。
技術特征:
1.一種爬壁機器人,包括中心連接板(1),其特征在于,所述中心連接板(1)上下側分別配合設置有x軸移動板(2)和y軸移動板(3),所述x軸移動板(2)和所述y軸移動板(3)能夠分別在所述中心連接板(1)上沿x軸和y軸移動,所述x軸移動板(2)兩端分別設置有第一驅動電機(4)和第二驅動電機(5),所述第一驅動電機(4)的輸出軸連接有第一帶齒驅動輪(6),所述第二驅動電機(5)的輸出軸連接有第二帶齒驅動輪(7),所述y軸移動板(3)上兩側分別設置有帶齒輔助輪(8)和皮帶張緊裝置(9),傳送齒形帶(10)的兩端均與所述皮帶張緊裝置(9)連接,所述傳送齒形帶(10)同時繞在所述第一帶齒驅動輪(6)、所述帶齒輔助輪(8)和所述第二帶齒驅動輪(7)上,所述x軸移動板(2)兩端和所述y軸移動板(3)兩端均連接有升降吸盤機構。
2.根據權利要求1所述的一種爬壁機器人,其特征在于,所述x軸移動板(2)下方連接有x軸導軌(11),所述y軸移動板(3)上方連接有y軸導軌(12),所述中心連接板(1)上對應所述x軸導軌(11)設置有x軸滑塊(13),所述x軸滑塊(13)被限制在所述x軸導軌(11)上,使所述x軸移動板(2)與所述中心連接板(1)相互連接,對應所述y軸導軌(12)設置有y軸滑塊(14),所述y軸滑塊(14)被限制在所述y軸導軌(12)上,使所述y軸移動板(3)與所述中心連接板(1)相互連接,所述x軸移動板(2)通過所述x軸導軌(11)與所述x軸滑塊(13)的相互滑動在所述中心連接板(1)上沿x軸滑動,所述y軸移動板(3)通過所述y軸導軌(12)與所述y軸滑塊(14)的相互滑動在所述中心連接板(1)上沿y軸滑動。
3.根據權利要求1所述的一種爬壁機器人,其特征在于,所述中心連接板(1)下側四角設置有四個張緊輪(15),所述傳送齒形帶(10)經過所述張緊輪(15)后,構成十字結構。
4.根據權利要求1所述的一種爬壁機器人,其特征在于,所述升降吸盤機構包括升降氣缸(16)、吸盤連接板(17)和真空吸盤(18),所述升降氣缸(16)的伸縮桿與所述吸盤連接板(17)連接,所述真空吸盤(18)連接在所述吸盤連接桿下方。
5.根據權利要求4所述的一種爬壁機器人,其特征在于,對應所述x軸移動板(2)的所述升降氣缸(16)通過螺栓連接在所述x軸移動板(2)的兩端下方,所述y軸移動板(3)的兩端側方設置有加固連接板(19),對應所述y軸移動板(3)的所述升降氣缸(16)連接在所述加固連接板(19)側方,以彌補x軸移動板(2)與y軸移動板(3)之間存在的高度差異。
6.根據權利要求4所述的一種爬壁機器人,其特征在于,每個所述升降吸盤機構的所述真空吸盤(18)至少為兩個。
技術總結
一種爬壁機器人屬于自動化機器人技術領域。本發明包括中心連接板,中心連接板上下側分別配合設置有X軸移動板和Y軸移動板,X軸移動板兩端分別設置有第一驅動電機和第二驅動電機,第一驅動電機的輸出軸連接有第一帶齒驅動輪,第二驅動電機的輸出軸連接有第二帶齒驅動輪,Y軸移動板上兩側分別設置有帶齒輔助輪和皮帶張緊裝置,傳送齒形帶的兩端均與皮帶張緊裝置連接,傳送齒形帶同時繞在第一帶齒驅動輪、帶齒輔助輪和第二帶齒驅動輪上,X軸移動板兩端和Y軸移動板兩端均連接有升降吸盤機構。本發明實現在曲面上的靈活移動,并且顯著減輕了人力負擔,提高了作業精度與效率,確保了作業連續性與質量,有效降低了操作難度,提升了作業安全性。
技術研發人員:杜宸銘,姜春英,趙華,任俊松,顧海闊
受保護的技術使用者:沈陽航空航天大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!