一種大跨距無剛性梁雙軌道運輸機軌道過彎控制方法、控制系統及運輸機與流程
本發明涉及軌道運輸,尤其涉及一種適用于任何需要通過有兩個或以上支點的專用吊具實現自動物料運輸的大跨距無剛性梁雙軌道運輸機軌道過彎控制方法、控制系統及運輸機。
背景技術:
1、在許多應用場合,如金屬管棒型材表面處理線,金屬線材表面處理線,汽車車身表面處理線,金屬鑄件表面處理線,大型貨物裝運線,等,但不限于這些應用場合,需要采用軌道運輸機根據處理工序要求將物料準確高效送入指定位置。運輸機的結構類似于起重行車,其跨度相當于物料的長度。由于物料通常具有較大長度,最大可達30米或更長,與之相配的運輸機的軌道跨度亦相應做大。
2、傳統的行車結構的大跨度運輸機依靠剛性橫梁連接兩邊軌道上的驅動裝置,使兩端的運動速度相同。隨著跨度增大,這種運輸機的弊端也越來越明顯,主要存在一些弊端:1)為了保證一定的整體剛性,運輸機自身質量隨著跨度急劇增大。后果就是運行能耗大大增加。2)根據不同的負載和跨度要求,每臺運輸機都必須專門定制,設備設計和制造成本居高不下。3)運輸機兩端在高頻次的往復行駛中會導致嚴重的偏移,原因多為車輪機械加工誤差和磨損、軌道安裝誤差、軌道不均勻磨損、電機轉速不同步等。這種情況下,輕則出現咬軌現象導致運輸機停車,重則導致放置和提取物料時,運輸機一端因為偏移而使物料吊具脫離升降吊鉤而墜落,造成設備和物料毀壞。4)為避免物料負載在加減速時影響運輸機重心平衡,運輸機運行速度嚴重受限,無法進一步提高效率。有些設計在運輸機橫梁上安裝剛性吊桿連接物料吊具,進一步加大運輸機整機質量,并增加設備高度。
3、對此,本公司在先專利技術zl201611142027.x提出了上述問題的解決方案。但是,在平行彎道中,外側軌道和內側軌道的半徑差異導致兩側運輸機為了維持同步行駛,保持兩車之間的距離不過于太大,必須維持一定的速度差異,否則輕則出現偏移導致咬軌,重則導致運輸載荷脫落造成嚴重事故。此要求與直線軌道兩側速度完全一致的要求有明顯矛盾,因此在運輸車進入彎道和離開彎道時,速度控制問題未能有效獲得解決。因此,目前運輸方向的改變主要還是依賴其它車輛接駁的方式,造成運輸效率低,不同類型運輸車輛多,且接駁過程容易產生事故。
技術實現思路
1、本發明為解決現有平行軌道彎道的過彎控制同步問題,提供一種大跨距無剛性梁雙軌道運輸機軌道過彎控制方法、控制系統及運輸機,以使得運輸車在設備容忍的位移偏差范圍內正常無阻礙通過彎道。
2、為實現上述目的,本發明采用以下技術方案:
3、本發明的第一個方面是提供一種大跨距無剛性梁雙軌道運輸機軌道過彎控制方法,所述雙軌道運輸機由兩臺無剛性連接的運輸車組成,并分別布置于具有彎道的兩平行軌道上,包括如下步驟:
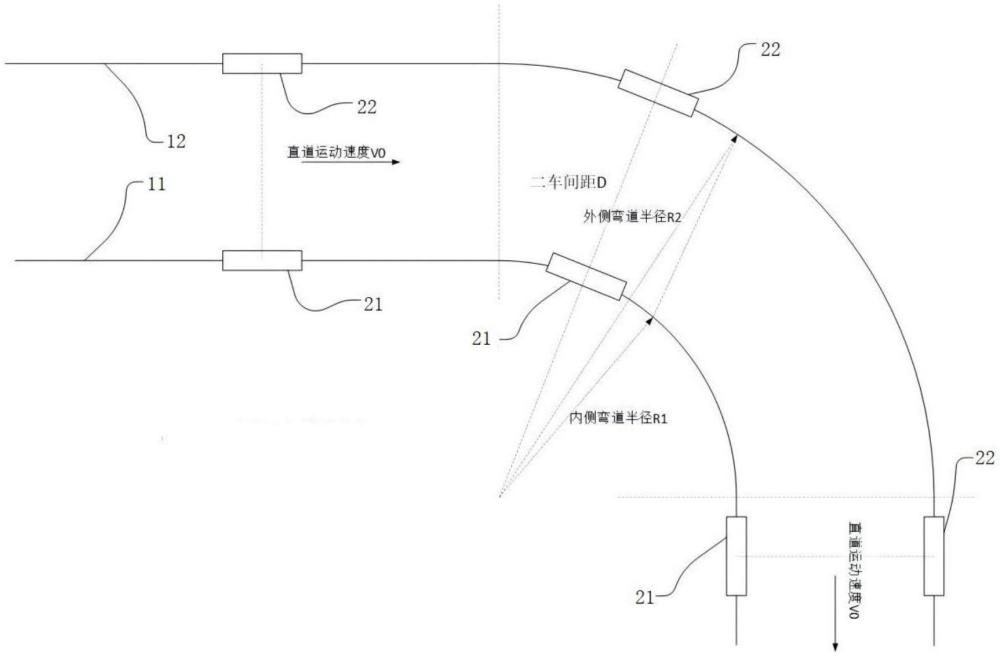
4、在進入彎道前的直道上,內側運輸車和外側運輸車均保持恒定的直線運動速度v0勻速行進;
5、在進入彎道時,當內側運輸車的行進速度減速至內側彎道補償最小速度vc1,及外側運輸車的行進速度加速至外側彎道補償最大速度vc2后,開始分別加速和減速至預設的內側彎道速度v1和外側彎道速度v2,并保持此速度在彎道上進行勻速運動;
6、在離開彎道時,當內側運輸車的行進速度加速至內側最高補償點vd1,及外側運輸車的行進速度減速至外側最低補償點vd2后,開始分別減速和加速,使得速度在進入直道時同時達到預設的第二直線運動速度v3,并保持此速度勻速運動。
7、優選地,所述彎道為30-180°彎道,優選為60-120°,多數應用場景為90°彎道。
8、優選地,所述內側彎道補償最小速度vc1<內側彎道速度v1<直線運動速度v0<內側最高補償點vd1;以及所述外側彎道補償最大速度vc2>外側彎道速度v2>直線運動速度v0>外側最低補償點vd2。
9、優選地,在進入彎道時,所述預設的內側彎道速度v1和外側彎道速度v2的關系如下公式:
10、
11、δv=v2-v0=v0-v1
12、
13、式中,r1為內側彎道半徑,r2為外側彎道半徑,在彎道r1和r2關系始終為r2-r1=d0;v0為內側運輸車和外側運輸車在直道上的行進速度。
14、優選地,在進入彎道時,所述內側彎道補償最小速度vc1和外側彎道補償最大速度vc2的關系如下公式:
15、vc2-v0=v0-vc1
16、從進入彎道時刻算起,外側運輸車達到外側彎道補償最大速度vc2的轉折時間為:
17、
18、或者,從進入彎道時刻算起,內側運輸車達到內側彎道補償最小速度vc1的轉折時間為:
19、
20、式中,δv=v2-v0=v0-v1,ta為實現δv的速度調節耗時。
21、優選地,在離開彎道時,所述內側最高補償點vd1和外側最低補償點vd2的關系如下公式:
22、vd1-v0=v0-vd2
23、從離開彎道時刻算起,外側運輸車達到外側最低補償點vd2的轉折時間為:
24、
25、或者,從離開彎道時刻算起,內側運輸車達到內側最高補償點vd1的轉折時間為:
26、
27、式中,δv=v2-v0=v0-v1,ta為實現δv的速度調節耗時。
28、優選地,所述實現δv的速度調節耗時ta按如下公式確定:
29、
30、式中,δv=v2-v0=v0-v1,ta0為從靜止到最高速度vmax或相反需要的耗時(假設運輸車的加速度或減速度相同)。
31、優選地,離開彎道時的所述第二直線運動速度v3等于直線運動速度v0,或外側最低補償點vd2<第二直線運動速度v3<內側彎道補償最小速度vc1。
32、本發明的第二個方面是提供一種采用上述任一項所述方法的大跨距無剛性梁雙軌道運輸機軌道過彎控制系統,由兩臺獨立的單軌運輸機控制系統組成,所述單軌運輸機控制系統包括:
33、行走模塊,其設置在內側運輸車或外側運輸車上,用于控制內側運輸車或外側運輸車在內外側軌道上水平移動;
34、可編程控制器,其與所述行走模塊電連接,用于接收或處理所述行走模塊反饋的位置、速度和狀態數據;
35、數據通訊模塊,其為無線或有線通訊裝置,用于將對應可編程控制器的信號或數據與另一個數據通訊模塊進行交換,實現速度協調。
36、本發明的第三個方面是提供一種大跨距無剛性梁雙軌道運輸機,具有與內側運輸車和內側運輸車電連接的控制裝置,所述控制裝置采用如所述控制系統。
37、本發明采用上述技術方案,與現有技術相比,具有如下技術效果:
38、本發明通過將兩臺獨立的單軌運輸機以對稱方式分置兩邊軌道,兩臺運輸機之間沒有剛性連接,兩臺運輸機之間通過數據通訊依據速度補償機制實現速度的協調,以滿足運輸機在直道和彎道同步運行的要求;本發明過彎控制方法以較低的設備投資成本實現高效、靈活和節能的全自動大跨距軌道過彎運輸,使得雙軌道的運輸方式得以靈活運用。
- 還沒有人留言評論。精彩留言會獲得點贊!