一種止蕩器及布放回收系統的制作方法
本技術涉及水下機器人布放回收,具體涉及一種止蕩器及布放回收系統。
背景技術:
1、隨著深水油氣勘探開發技術的不斷發展,水下機器人(rov)的應用得到了迅猛發展,其中纜控無人水下機器人尤為突出,是目前世界上使用最為廣泛的水下機器人。
2、其中,為水下機器人提供動力及信號反饋的電纜分為柔性纜和鎧裝纜兩類。柔性纜外面沒有鋼絲,且柔性纜不能承載太大的負載拉力(通常不大于1.5t),無法承受水下機器人在空氣中的重量。而鎧裝纜外面有鋼絲鎧裝層,鎧裝纜可以起到鋼絲繩的作用,能夠承受水下機器人在空氣中的重量。水下機器人在空氣中重量約4-6t,由于水下機器人帶浮力塊,水下機器人在水中的重量約為零。
3、因此,使用柔性纜收放水下機器人時需要借助輔助鋼纜絞車完成水下機器人在空氣中的運動。本專利將輔助鋼纜絞車集成到止蕩器上,稱其為游鎖絞車。止蕩器配有游鎖機構,游鎖絞車可以帶動游鎖上下運動。游鎖在上下運動的過程中是否處于垂直狀態很關鍵,關乎到游鎖能否順利進入止蕩器里以及能否順利解鎖的問題。
4、目前檢索到的專利cn112758256b中游鎖絞車為一個,通過一個馬達驅動。兩根鋼絲繩隨著游鎖絞車滾筒轉動,理論上會實現同步收放。但是實際上兩根鋼絲繩會因為排纜不同步的原因導致游鎖絞車滾筒轉動相同的圈數而兩根鋼絲繩收放不同的長度。時間久了誤差會積累變大,進而導致游鎖由垂直狀態變成傾斜狀態,最終導致游鎖無法進入到止蕩器,或者水下機器人鎖頭無法從游鎖中脫離解鎖的問題。
技術實現思路
1、本實用新型的目的旨在至少在一定程度上解決上述的技術問題之一。
2、為此,本實用新型的第一個目的在于提出一種止蕩器,通過將游鎖絞車由一個變成兩個,且每個游鎖絞車都有一個馬達驅動,既可以同時控制兩個游鎖絞車轉動,又可以單獨控制其中一個游鎖絞車轉動,實現了調整游鎖始終處于垂直狀態的目的。
3、本實用新型的第二個目的在于提出一種布放回收系統。
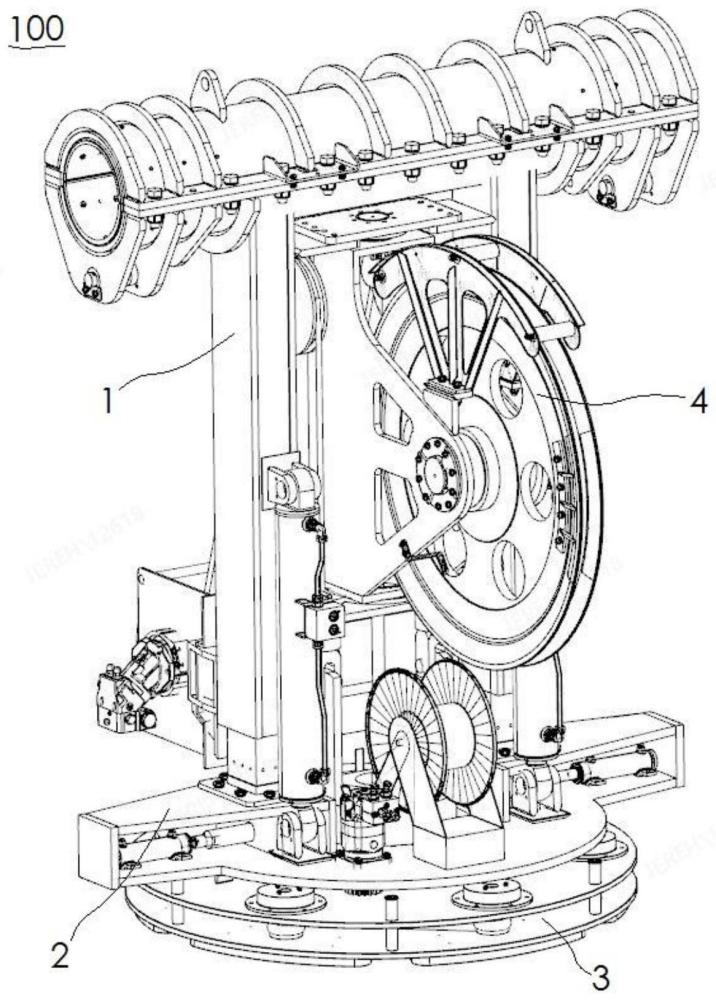
4、為達到上述目的,本實用新型第一方面實施例提出的一種止蕩器,所述止蕩器包括:
5、框架機構、導輪機構、游鎖絞車機構及游鎖;
6、其中,所述導輪機構連接在所述框架機構的一端,所述游鎖絞車機構連接在與所述導輪機構相對一端的所述框架機構上,所述游鎖絞車機構上纏繞有鋼絲繩,所述游鎖連接在所述鋼絲繩上。
7、根據本實用新型的一個實施例,所述框架機構包括:
8、導向立柱、滑輪及索節限位器;
9、所述導向立柱包括:第一導向立柱、第二導向立柱及空心連接柱;所述第一導向立柱和所述第二導向立柱相互平行,且所述第一導向立柱和所述第二導向立柱垂直連接在所述空心連接柱上;
10、所述滑輪至少包括兩個,兩個所述滑輪分別連接在所述第一導向立柱和所述第二導向立柱的頂端,配置為對所述鋼絲繩進行導向;
11、所述索節限位器至少包括兩個,兩個所述索節限位器分別連接在所述第一導向立柱和所述第二導向立柱的底端,配置為對所述游鎖進行縱向限位。
12、根據本實用新型的一個實施例,所述止蕩器還包括:伸縮機構;
13、所述伸縮機構包括:
14、圓形連接板、伸縮油缸、限位油缸、限位銷軸、旋轉馬達及回轉支撐;
15、所述圓形連接板的中部開設有可容納所述游鎖的第一游鎖孔,所述圓形連接板的兩端延伸有第一延伸架和第二延伸架;
16、所述伸縮油缸至少包括兩個,兩個所述伸縮油缸分別連接在所述第一導向立柱和所述第二導向立柱的一側;
17、所述限位油缸和所述限位銷軸連接,所述限位油缸和所述限位銷軸分別包括兩個,兩個所述限位油缸和所述限位銷軸分別連接在所述第一延伸架和所述第二延伸架內,配置為對所述游鎖進行橫向限位;
18、所述旋轉馬達安裝在所述圓形連接板上,配置為帶動所述回轉支撐旋轉;
19、所述回轉支撐安裝在所述第一游鎖孔的邊緣,與所述轉盤機構接觸,配置為帶動所述轉盤機構旋轉。
20、根據本實用新型的一個實施例,所述止蕩器還包括:轉盤機構;
21、所述轉盤機構包括:
22、第一轉盤、氣囊及壓緊盤;
23、所述第一轉盤蓋設在所述壓緊盤上,與所述回轉支撐接觸;
24、所述氣囊安裝在所述第一轉盤和所述壓緊盤之間,配置為對所述壓緊盤進行下壓;
25、所述壓緊盤在所述氣囊提供的下壓力后,所述壓緊盤的下表面與運輸管理系統的上表面壓緊。
26、根據本實用新型的一個實施例,所述第一轉盤和所述壓緊盤的中部開設有可容納所述游鎖的第二游鎖孔。
27、根據本實用新型的一個實施例,所述導輪機構包括:
28、導輪、導輪固定架及防跳攬結構;
29、所述導輪安裝在所述導輪固定架上,所述導輪具有導輪槽;
30、所述導輪固定架安裝在兩個所述滑輪之間;
31、所述防跳攬結構呈扇形,安裝在所述導輪的頂部,且與所述導輪具有一定間隙。
32、根據本實用新型的一個實施例,所述游鎖絞車機構包括:
33、第一絞車、第二絞車、第一馬達及第二馬達;
34、所述第一絞車和所述第二絞車并排設置;
35、所述第一馬達安裝在靠近所述第一絞車的一端,配置為驅動所述第一絞車;
36、所述第二馬達安裝在靠近所述第二絞車的一端,配置為驅動所述第二絞車;
37、其中,所述第一絞車和所述第二絞車可同步轉動,或所述第一絞車單獨轉動,或所述第二絞車單獨轉動。
38、根據本實用新型的一個實施例,所述游鎖包括:
39、游鎖外部及游鎖內部;
40、所述游鎖外部包括:游鎖框架,以及與所述游鎖框架鉸接的索節;
41、所述索節與所述鋼絲繩澆筑;
42、所述游鎖框架的兩側開設有銷孔,所述銷孔與所述限位銷軸相配合;
43、所述游鎖內部包括:鎖體、鎖頭、鎖塊及伸縮桿;
44、所述鎖體的中部呈貫通結構,且所述鎖體的側面具有開孔;
45、所述鎖頭穿過所述貫通結構;
46、所述鎖塊穿過所述開孔與所述鎖體鉸接;
47、所述伸縮桿的第一端與所述鎖塊鉸接,所述伸縮桿的第二端與所述鎖體鉸接。
48、根據本實用新型的一個實施例,所述鎖塊上安裝有指示板;
49、所述指示板配置為判斷所述游鎖是否處于鎖緊狀態或解鎖狀態。
50、為達到上述目的,本實用新型第二方面實施例提出一種布放回收系統,所述布放回收系統用于對運輸管理系統和/或水下機器人進行布放回收;
51、所述布放回收系統包括:
52、臍帶纜絞車、臍帶纜、a架以及上述第一方面中止蕩器的任一實施例;
53、其中,所述臍帶纜包括:鎧裝臍帶纜或柔性臍帶纜;
54、當使用鎧裝臍帶纜時;
55、所述臍帶纜絞車與所述鎧裝臍帶纜連接,所述a架與所述止蕩器的空心連接柱連接,所述鎧裝臍帶纜纏繞于導輪槽內,并通過游鎖絞車機構與鋼絲繩連接,帶動游鎖上下運動,所述游鎖上下運動帶動運輸管理系統和水下機器人運動;
56、當使用柔性臍帶纜時;
57、所述臍帶纜絞車與所述柔性臍帶纜連接,所述a架與所述止蕩器的空心連接柱連接,所述柔性臍帶纜纏繞于導輪槽內,并通過游鎖絞車機構與鋼絲繩連接,帶動游鎖上下運動,所述游鎖上下運動帶動水下機器人運動。
58、本實用新型附加的方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本實用新型的實踐了解到。
59、與現有技術相比,本技術實施例的有益效果是:
60、本實用新型提供一種止蕩器及布放回收系統,有效解決或在一定程度上改善了傳統的通過一個馬達驅動,兩根鋼絲繩隨著游鎖絞車滾筒轉動,理論上會實現同步收放。但是實際上兩根鋼絲繩會因為排纜不同步的原因導致游鎖絞車滾筒轉動相同的圈數而兩根鋼絲繩收放不同的長度。時間久了誤差會積累變大,進而導致游鎖由垂直狀態變成傾斜狀態,最終導致游鎖無法進入到止蕩器,或水下機器人的鎖頭無法從游鎖中脫離解鎖的問題。
61、本實用新型提供一種止蕩器,通過將游鎖絞車由一個變成兩個,且每個游鎖絞車都有一個馬達驅動,既可以同時控制兩個游鎖絞車轉動,又可以單獨控制其中一個游鎖絞車轉動。正常收放時兩個游鎖絞車同步運動,當其中一根鋼絲繩出現較明顯的長短不一導致游鎖傾斜時,通過單獨控制另一個游鎖絞車調整游鎖為處于垂直,實現了可以調整游鎖始終處于垂直狀態的目的。
62、本實用新型提供一種布放回收系統,當使用鎧裝臍帶纜時;臍帶纜絞車與鎧裝臍帶纜連接,a架與止蕩器的空心連接柱連接,鎧裝臍帶纜纏繞于導輪槽內,并通過游鎖絞車機構與鋼絲繩連接,帶動游鎖上下運動,游鎖上下運動帶動運輸管理系統和水下機器人運動。當使用柔性臍帶纜時;臍帶纜絞車與柔性臍帶纜連接,a架與止蕩器的空心連接柱連接,柔性臍帶纜纏繞于導輪槽內,并通過游鎖絞車機構與鋼絲繩連接,帶動游鎖上下運動,游鎖上下運動帶動水下機器人運動。
63、為了能更清楚了解本實用新型的技術手段,而可依照說明書的內容予以實施,并且為讓本實用新型的上述和其他目的、特征和優點能夠更明顯易懂,以下特舉較佳實施例,并配合附圖,詳細說明如下。本實用新型的其它特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本實用新型而得以體現。本實用新型的目的和其他優點可通過在說明書、權利要求書以及附圖中所特別指出的結構來實現和獲得。
- 還沒有人留言評論。精彩留言會獲得點贊!