一種帶式輸送機拆除機器人的機身主體的制作方法
本技術屬于帶式輸送機,具體涉及一種帶式輸送機拆除機器人的機身主體。
背景技術:
1、可伸縮帶式輸送機作為智能化綜采工作面的配套設備,適用于煤礦工作面運輸巷中通過自移機尾將刮板轉載機與工作面運輸機銜接,它具有與轉載機互為支點自行移動的自移機尾,自移機尾具有向前移動及姿態調整功能,確保在前移后機尾中心線與皮帶中心線對正,保證順槽運輸轉載的通暢,滿足高產高效工作面高進尺、快推進的配套要求。
2、生產過程中可伸縮帶式輸送機必須跟隨工作面的推進而縮短長度,同時機身也需要相應不斷地拆卸,在拆卸機身中間部分時必須在停機狀態下完成,而不能在一個班次內集中完成,從而不能保證生產連續進行,嚴重制約了智能化綜采工作面采煤作業的順利實施,降低了整體效率,因此需要一種可以跟隨自移機尾同步前進的拆除機器人,來做到不停機對帶式輸送機機身進行拆除,此時就需要設計一種可以自動前進的拆除機器人的機身主體,來滿足拆除機器人的主體需求。
技術實現思路
1、本實用新型克服了現有技術的不足,提出一種帶式輸送機拆除機器人的機身主體;解決目前缺乏一種可以隨著自移機尾自動前進的機器人的機身主體的問題。
2、為了達到上述目的,本實用新型是通過如下技術方案實現的。
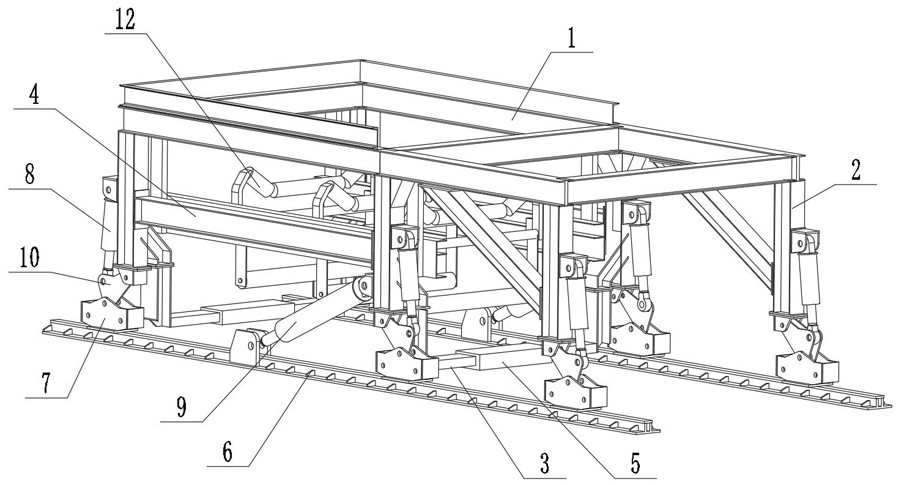
3、一種帶式輸送機拆除機器人的機身主體,設置于帶式輸送機的自移機尾與機身之間,帶式輸送機上的輸送帶穿過機身主體,在機身主體下端設置有行走機構;所述機身主體包括一個頂部框架、六根支撐腿以及前后兩個內部支撐調偏架,所述頂部框架為水平設置的方形框架結構,在頂部框架的下端面左右兩側邊緣處分別設置有前、中、后三根豎直的支撐腿,所述內部支撐調偏架為開口向上的u型結構,內部支撐結構的上側兩端分別與兩側的支撐腿相固定連接。
4、進一步的,前側的內部支撐調偏架設置于中部的兩根支撐腿之間,后側的內部支撐調偏架設置于后端的兩根支撐腿之間。
5、進一步的,所述內部支撐調偏架包括兩側豎直的滑動架以及底部的水平缸,兩側豎直的滑動架上端兩端分別與兩側的支撐腿相互靠近的一側端面中部相固定連接;所述水平缸為水平設置的雙桿液壓缸,水平缸的兩個活塞桿端部分別與兩側豎直的滑動架下端相連接,水平缸的缸體高度低于支撐腿最下端的高度。
6、進一步的,支撐腿與頂部框架之間或者前后相鄰的支撐腿之間固定設置有加強桿。
7、進一步的,所述行走機構包括兩根左右對稱的行走軌道、六個行走支座、六根抬高油缸、兩根推移油缸,六個行走支座以及六根抬高油缸分別與六根支撐腿相對應;兩根行走軌道沿著前后方向水平設置,兩根行走軌道分別設置于左右兩排支撐腿的下方;在每根行走軌道上端面分別滑動設置有三個行走支座,三個行走支座分別設置于同一側的三根支撐腿的下端。
8、進一步的,在每根支撐腿下端分別鉸接有一個升降連桿,升降連桿的第一個角與支撐腿下端相鉸接,升降連桿的第二個角與支撐腿下端的行走支座上端相鉸接;在每根支撐腿上分別鉸接有一根抬高油缸,抬高油缸的缸底一端與支撐腿相鉸接,抬高油缸的活塞桿一端與支撐腿下端的升降連桿的第三個角相鉸接。
9、進一步的,中端的兩根支撐腿與同側的行走軌道之間分別設置有一根推移油缸,推移油缸的缸底一端與支撐腿相鉸接,推移油缸的活塞桿一端與行走軌道相鉸接;推移油缸的活塞桿一端向著后側下方所傾斜設置。
10、進一步的,在機身主體內部還設置有托帶機構,所述托帶機構包括左右兩側的固定架以及中部的一排托帶架;左右兩側的固定架分別設置于兩側的支撐腿之間,固定架位于前后方向的豎直平面內,固定架上端與頂板框架相固定連接,在兩側的固定架相互靠近的一側端面上分別設置有一個滑行軌道,一排的托帶架沿著前后方向排列設置,一排托帶架滑動設置于兩側的滑行軌道之間。
11、更進一步的,所述托帶架包括托輥架、上側托輥組、固定桿、下托輥、滑行輪;托輥架位于左右方向的豎直平面內,在托輥架內部設置有上側托輥組;在托輥架的左右兩端分別轉動設置有一組滑行輪,兩端的滑行輪分別滾動連接于兩側的滑行軌道內部;在托輥架的下端面左右兩端分別設置有一根豎直的固定桿,兩根固定桿下端之間轉動設置有下托輥;帶式輸送機位于上側的輸送帶與上側托輥組相接觸,帶式輸送機位于下側的輸送帶與下托輥相接觸。
12、本實用新型相對于現有技術所產生的有益效果為:
13、通過本實用新型提供的一種帶式輸送機拆除機器人的機身主體,設置于煤礦井下綜采工作面順槽可伸縮帶式輸送機和自移機尾銜接處,通過設置的行走機構可以實現機身主體隨著自移機尾同步移動,而不需要再額外設置移動機構,保證拆除機器人在不停機情況下完成與自移機尾的同步前移;通過設置的托帶機構可以對經過拆除機器人機身主體的輸送帶進行托舉,從而保證在對帶式輸送機機身進行拆除過程中帶式輸送帶也可以正常輸送作業,實現不停機情況下對帶式輸送機機身的拆除。
技術特征:
1.一種帶式輸送機拆除機器人的機身主體,其特征在于:設置于帶式輸送機的自移機尾與機身之間,帶式輸送機上的輸送帶穿過機身主體,在機身主體下端設置有行走機構;所述機身主體包括一個頂部框架(1)、六根支撐腿(2)以及前后兩個內部支撐調偏架(3),所述頂部框架(1)為水平設置的方形框架結構,在頂部框架(1)的下端面左右兩側邊緣處分別設置有前、中、后三根豎直的支撐腿(2),所述內部支撐調偏架(3)為開口向上的u型結構,內部支撐結構的上側兩端分別與兩側的支撐腿(2)相固定連接。
2.根據權利要求1所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:前側的內部支撐調偏架(3)設置于中部的兩根支撐腿(2)之間,后側的內部支撐調偏架(3)設置于后端的兩根支撐腿(2)之間。
3.根據權利要求1所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:所述內部支撐調偏架(3)包括兩側豎直的滑動架以及底部的水平缸(5),兩側豎直的滑動架上端兩端分別與兩側的支撐腿(2)相互靠近的一側端面中部相固定連接;所述水平缸(5)為水平設置的雙桿液壓缸,水平缸(5)的兩個活塞桿端部分別與兩側豎直的滑動架下端相連接,水平缸(5)的缸體高度低于支撐腿(2)最下端的高度。
4.根據權利要求1所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:支撐腿(2)與頂部框架(1)之間或者前后相鄰的支撐腿(2)之間固定設置有加強桿(4)。
5.根據權利要求1所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:所述行走機構包括兩根左右對稱的行走軌道(6)、六個行走支座(7)、六根抬高油缸(8)、兩根推移油缸(9),六個行走支座(7)以及六根抬高油缸(8)分別與六根支撐腿(2)相對應;兩根行走軌道(6)沿著前后方向水平設置,兩根行走軌道(6)分別設置于左右兩排支撐腿(2)的下方;在每根行走軌道(6)上端面分別滑動設置有三個行走支座(7),三個行走支座(7)分別設置于同一側的三根支撐腿(2)的下端。
6.根據權利要求5所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:在每根支撐腿(2)下端分別鉸接有一個升降連桿(10),升降連桿(10)的第一個角與支撐腿(2)下端相鉸接,升降連桿(10)的第二個角與支撐腿(2)下端的行走支座(7)上端相鉸接;在每根支撐腿(2)上分別鉸接有一根抬高油缸(8),抬高油缸(8)的缸底一端與支撐腿(2)相鉸接,抬高油缸(8)的活塞桿一端與支撐腿(2)下端的升降連桿(10)的第三個角相鉸接。
7.根據權利要求6所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:中端的兩根支撐腿(2)與同側的行走軌道(6)之間分別設置有一根推移油缸(9),推移油缸(9)的缸底一端與支撐腿(2)相鉸接,推移油缸(9)的活塞桿一端與行走軌道(6)相鉸接;推移油缸(9)的活塞桿一端向著后側下方所傾斜設置。
8.根據權利要求1所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:在機身主體內部還設置有托帶機構,所述托帶機構包括左右兩側的固定架(11)以及中部的一排托帶架(12);左右兩側的固定架(11)分別設置于兩側的支撐腿(2)之間,固定架(11)位于前后方向的豎直平面內,固定架(11)上端與頂板框架相固定連接,在兩側的固定架(11)相互靠近的一側端面上分別設置有一個滑行軌道(13),一排的托帶架(12)沿著前后方向排列設置,一排托帶架(12)滑動設置于兩側的滑行軌道(13)之間。
9.根據權利要求8所述的一種帶式輸送機拆除機器人的機身主體,其特征在于:所述托帶架(12)包括托輥架(14)、上側托輥組(15)、固定桿(16)、下托輥(17)、滑行輪(18);托輥架(14)位于左右方向的豎直平面內,在托輥架(14)內部設置有上側托輥組(15);在托輥架(14)的左右兩端分別轉動設置有一組滑行輪(18),兩端的滑行輪(18)分別滾動連接于兩側的滑行軌道(13)內部;在托輥架(14)的下端面左右兩端分別設置有一根豎直的固定桿(16),兩根固定桿(16)下端之間轉動設置有下托輥(17);帶式輸送機位于上側的輸送帶與上側托輥組(15)相接觸,帶式輸送機位于下側的輸送帶與下托輥(17)相接觸。
技術總結
本技術涉及一種帶式輸送機拆除機器人的機身主體,屬于帶式輸送機技術領域;設置于帶式輸送機的自移機尾與機身之間,帶式輸送機上的輸送帶穿過機身主體,在機身主體下端設置有行走機構;所述機身主體包括一個頂部框架、六根支撐腿以及前后兩個內部支撐調偏架,所述頂部框架為水平設置的方形框架結構,在頂部框架的下端面左右兩側邊緣處分別設置有前、中、后三根豎直的支撐腿,所述內部支撐調偏架為開口向上的U型結構,內部支撐結構的上側兩端分別與兩側的支撐腿相固定連接;解決目前缺乏一種可以隨著自移機尾自動前進的機器人的機身主體的問題。
技術研發人員:趙軒,裴寶琳,高海燈,馮旺,高飛
受保護的技術使用者:太重集團向明智能裝備股份有限公司
技術研發日:20240703
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!