一種自適應水下云臺及其控制方法與流程
本發明屬于水下作業,尤其一種自適應水下云臺及其控制方法。
背景技術:
1、現有水下拍攝作業大多采用水下云臺,用于輔助拍攝。傳統水下云臺通常由傳感器、控制系統、驅動系統和工作系統組成。傳感器包括用于監測攝像機傾斜角度和角速度的陀螺儀傳感器,以及監測攝像機旋轉角度和位置的位置傳感器。操作人員通過接收傳感器得到的信息,通過控制系統發出針對攝像頭運動方向、速度、角度的控制指令,驅動系統將接收到的控制信號轉化為電信號,通過直流電機驅動傳動裝置,操作旋轉軸,使攝像機到達指定姿態,且傳統的水下云臺采用電池續航。
2、現有的水下云臺,受結構限制,無法將電池容量設置的較大,而且水下的低溫環境會導致電池實際容量進一步降低,現有的水下云臺在工作時,控制系統需要操縱驅動電機頻繁工作來調整角度,純粹依賴驅動電機來調整水下云臺的角度,需要消耗大量電能,導致電池續航不足的問題,因此需要一種能夠結合云臺外圍水流因素,提高電池續航的自適應水下云臺用于解決上述問題。
技術實現思路
1、本發明要解決的是水下云臺需頻繁調整水下云臺的角度,純粹依賴于驅動電機來調整水下云臺的角度,驅動電機的耗電量大。
2、為了實現上述目的,本發明提供了一種自適應水下云臺及其控制方法:
3、一種自適應水下云臺,包括云臺殼體以及連接在所述云臺殼體上的動力推進系統、檢測組件、電源供電器和控制系統;
4、所述云臺殼體為內部中空且密封的殼體結構;
5、所述動力推進系統安裝在所述云臺殼體外側,所述動力推進系統使水下云臺實現前進、后退、左轉、右轉、定點旋轉、上浮、下潛和左右平移中任意一種運動或任意幾種組合的位姿調整;
6、所述檢測組件包括安裝在所述云臺殼體上的位置傳感器、水流傳感器和陀螺儀傳感器,所述位置傳感器和所述水流傳感器均設置在所述云臺殼體的前端,所述陀螺儀傳感器安裝在云臺殼體內部的后端;
7、所述電源供電器安裝在所述云臺殼體內部,為所述動力推進系統、所述位置傳感器、所述水流傳感器、所述陀螺儀傳感器、所述控制系統提供電力;
8、所述控制系統安裝在所述云臺殼體內部,所述控制系統與所述動力推進系統、所述位置傳感器、所述水流傳感器、所述陀螺儀傳感器進行信號傳輸;
9、所述控制系統被配置為:
10、根據所述水流傳感器提供的水流信息和所述陀螺儀傳感器和位置傳感器提供的水下云臺位姿信息,控制所述動力推進系統利用所述水流進行水下云臺的位姿調整。
11、優選的,所述位置傳感器的檢測本體安裝在所述云臺殼體內,所述位置傳感器的檢測探頭延伸至所述云臺殼體外且與所述云臺殼體之間密封連接,所述水流傳感器的檢測本體安裝在所述云臺殼體內,所述水流傳感器的檢測探頭延伸至所述云臺殼體外且與所述云臺殼體之間密封連接。
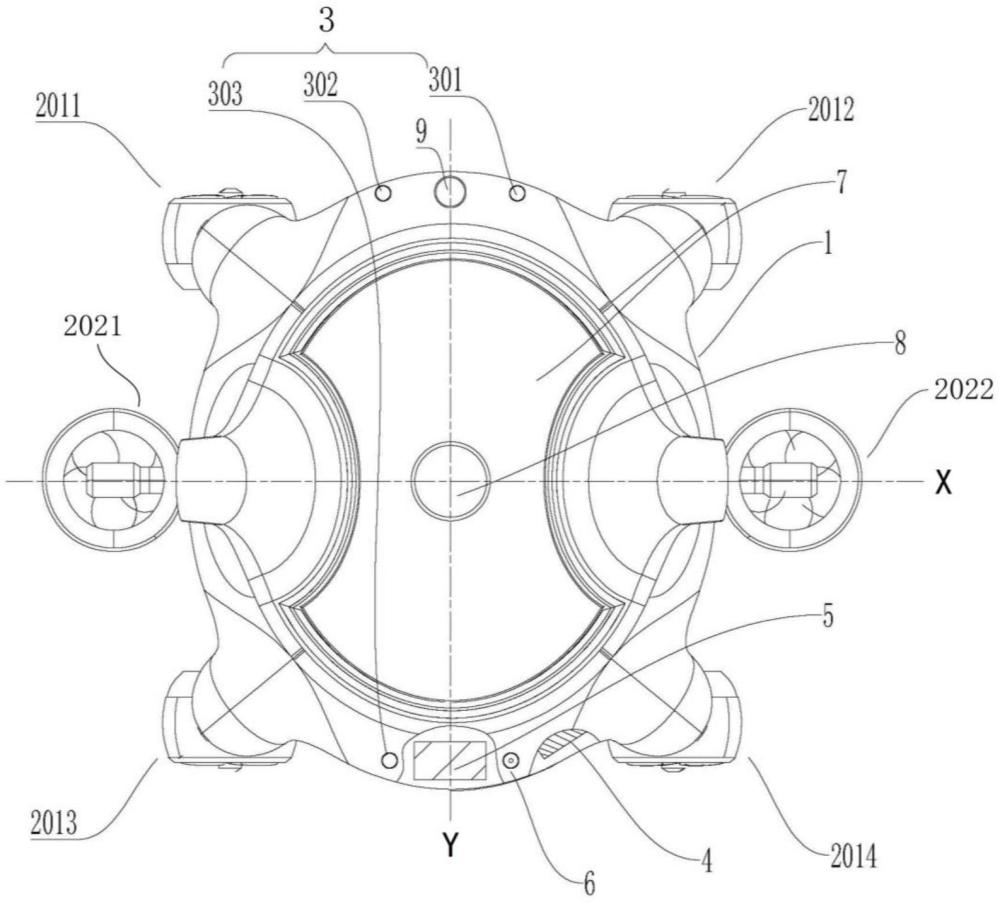
12、優選的,所述動力推進系統包括水平推進系統和豎直推進系統;所述云臺殼體具有水平方向延伸且相互垂直的第一中心線和第二中心線;
13、所述水平推進系統包括安裝在所述云臺殼體下端的四組全回轉螺旋槳推進器,所述全回轉螺旋槳推進器的豎向回轉軸沿所述云臺殼體的豎向進行設置且能在水平方向上進行360°轉動,以實現水下云臺沿水平方向上的位姿調整;
14、兩組所述全回轉螺旋槳推進器設置在所述云臺殼體的前端,分別為前端左側推進器和前端右側推進器,另外兩組所述全回轉螺旋槳推進器設置在所述云臺殼體的后端,分別為后端左側推進器和后端右側推進器,其中,所述前端左側推進器和所述前端右側推進器關于所述第二中心線對稱設置,所述后端左側推進器和所述后端右側推進器關于所述第二中心線對稱設置,所述前端左側推進器和所述后端左側推進器沿關于所述第一中心線對稱設置,所述前端右側推進器和所述后端右側推進器關于所述第一中心線對稱設置;
15、所述豎直推進系統包括安裝在所述云臺殼體上端的左推進器和右推進器,所述左推進器和所述右推進器的螺旋槳的轉軸均沿豎向設置,用于調整水下云臺豎直方向上的位姿;
16、所述左推進器和所述右推進器關于所述第二中心線對稱設置,且設置于所述第一中心線上;
17、四組所述全回轉式螺旋槳推進器與云臺殼體的連接處、所述左推進器和所述右推進器與所述云臺殼體的連接處均進行密封連接。
18、優選的,四組所述全回轉式螺旋槳推進器、所述左推進器和所述右推進器與所述云臺殼體的連接處均采用機械密封。
19、優選的,所述全回轉式螺旋槳推進器具有驅動豎向回轉軸轉動的第一驅動電機和驅動螺旋槳槳葉轉動的第二驅動電機,所述固定式螺旋槳推進器具有驅動螺旋槳槳葉轉動的第三驅動電機,所述第一驅動電機、第二驅動電機和第三驅動電機均安裝在所述云臺殼體內,所述第一驅動電機、第二驅動電機和第三驅動電機均為直流編碼減速電機,所述第一驅動電機、第二驅動電機和第三驅動電機均與所述電源供電器電性連接,且所述第一驅動電機、第二驅動電機和第三驅動電機均與所述控制系統進行信號傳輸連接。
20、優選的,所述電源供電器為安裝在所述云臺殼體內部的直流發電機,所述電源供電器具有電源開關,所述電源開關安裝在所述云臺殼體的外側且與云臺殼體之間密封連接,所述電源供電器與所述位置傳感器、所述水流傳感器、所述陀螺儀傳感器、所述電源供電器、所述動力推進系統和所述控制系統之間電性連接。
21、優選的,所述位置傳感器的檢測探頭與所述云臺殼體之間密封膠進行密封連接,所述水流傳感器的檢測探頭與所述云臺殼體之間密封膠進行密封連接。
22、優選的,還包括磁吸平臺,所述磁吸平臺安裝在所述云臺殼體的上端,所述磁吸平臺的中心位置處安裝有用于固定攝像機的磁鐵。
23、優選的,還包括照明器,所述照明器安裝在所述云臺殼體的前端,所述照明器與所述電源供電器之間電性連接。
24、一種自適應水下云臺的控制方法,其特征在于,包括以下步驟:
25、步驟一:通過水流傳感器測量云臺殼體位置處的水流速度和方向,得到水流量,進而得到水流的阻力信息;通過陀螺儀傳感器和位置傳感器收集所述云臺殼體的位姿信息,其中,所述陀螺儀傳感器收集云臺的姿態偏差,所述位置傳感器收集所述云臺殼體的距離偏差;
26、步驟二:控制系統對所述陀螺儀傳感器和所述位置傳感器檢測到的位姿信息進行模糊控制,得到精確的控制量;
27、步驟三:所述控制系統接收到當前的水流的阻力信息,結合所述云臺殼體的位姿信息的精確控制量,所述控制系統根據之前設定好的拍攝任務和目標進行分析下達指令給動力推進系統以改變云臺位置;
28、當判定可以利用水流輔助推動云臺進行轉動時,所述控制系統控制所述動力推進系統以較小的功率調整所述云臺殼體的方向,并使所述云臺殼體能夠與拍攝目標保持相對靜止;當判定水流方向與拍攝方向相反時,等待水流方向改變或水流阻力減弱后再進行拍攝工作。
29、步驟四:根據所述水流速度和方向的變化,重復上述步驟一至步驟三。
30、本發明在云臺殼體上設置多普勒水流傳感器、位置傳感器、陀螺儀傳感器、全回轉螺旋槳推進器、固定式螺旋槳推進器和控制系統,利用多普勒傳感器采集水流信息,位置傳感器和陀螺儀傳感器采集云臺位姿信息,采集的水流信息和云臺位姿信息作為控制系統的輸入量進行分析,控制系統會根據之前設定好的拍攝任務和目標進行分析,判定水流方向與拍攝方向的相同與不同,下達指令給全回轉螺旋槳推進器和固定式螺旋槳推進器配合水流改變云臺位置,該水下云臺在水流狀態滿足拍攝需求時,可利用水流來調整水下云臺的方向,使得推進器的驅動電機功率得以下降,大大減少了拍攝過程中對電能的消耗,起到了節約能耗的效果,進而提高云臺的續航能力。
- 還沒有人留言評論。精彩留言會獲得點贊!