車輛行駛路徑規(guī)劃方法、裝置、電子設備、介質和車輛與流程
本公開涉及路徑規(guī)劃,尤其涉及一種車輛行駛路徑規(guī)劃方法、裝置、電子設備、介質和車輛。
背景技術:
1、無人駕駛技術是指無需在用戶干預的情況下,車輛自主實現(xiàn)對車輛控制與操作,從而實現(xiàn)汽車駕駛自動化的技術。目前,無人駕駛技術已成為智能交通領域的研究熱點,其中,對于無人駕駛技術,由于無需用戶駕駛車輛,因此,對于車輛在無人駕駛過程中,確定合適的行駛路徑是保證車輛、用戶安全的重要前提。
2、現(xiàn)有技術中,通常會根據(jù)采集的行駛環(huán)境信息,優(yōu)先確定出目標行駛路徑,車輛根據(jù)目標行駛路徑在行駛過程中,當遇到障礙物時,通常會通過加速、減速的方式進行規(guī)避,或者是通過基于采樣與搜索的方式進行規(guī)避。
3、然而,針對復雜的、多樣化的交通場景如交通路口,采用現(xiàn)有技術,無法避免交通路口存在的干擾路徑上的動態(tài)障礙物如車輛、行人對車輛造成的安全影響,從而導致車輛行駛過程中安全性較低的問題。
技術實現(xiàn)思路
1、為了解決上述技術問題,本公開提供了一種車輛行駛路徑規(guī)劃方法、裝置、電子設備、介質和車輛。當目標車輛處于交通路口時,能夠根據(jù)動態(tài)獲取的目標車道存在的一條或多條目標干擾路徑,以及其對應的轉彎曲率,確定目標干擾路徑對目標車輛行駛過程中產生的第二安全代價,進一步結合第一安全代價和第二安全代價,在多條候選路徑確定目標行駛路徑,以此方式考慮到當目標車輛在交通路口時,對于候選路徑存在的干擾路徑,對目標車輛行駛過程中的安全性影響,提高目標車輛在行駛過程中的安全性。
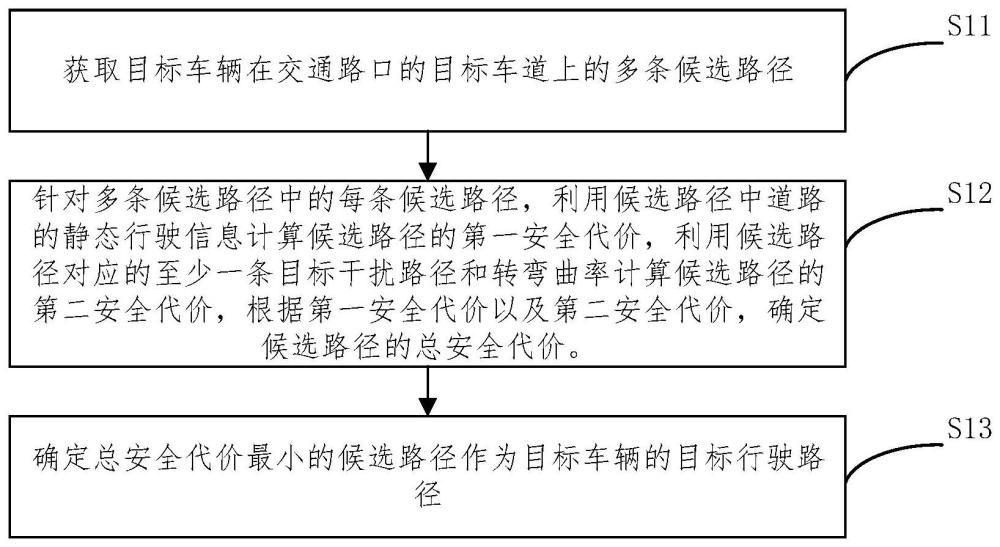
2、第一方面,本公開實施例提供了車輛行駛路徑規(guī)劃方法,包括:獲取目標車輛在交通路口的目標車道上的多條候選路徑;
3、針對多條候選路徑中的每條候選路徑,利用候選路徑中道路的靜態(tài)行駛信息計算候選路徑的第一安全代價,利用候選路徑對應的至少一條目標干擾路徑和轉彎曲率計算候選路徑的第二安全代價,根據(jù)所述第一安全代價以及所述第二安全代價,確定所述候選路徑的總安全代價;
4、確定所述總安全代價最小的所述候選路徑作為所述目標車輛的目標行駛路徑。
5、可選的,所述利用候選路徑對應的至少一條目標干擾路徑和轉彎曲率計算候選路徑的第二安全代價之前,還包括:
6、獲取所述每條候選路徑存在的至少兩條初始干擾路徑、以及所述初始干擾路徑中的動態(tài)障礙物;
7、根據(jù)所述動態(tài)障礙物的障礙物總數(shù)與預設數(shù)值的大小關系,在所述至少兩條初始干擾路徑中確定所述至少一條目標干擾路徑。
8、可選的,所述候選路徑包括:目標車道出路口和目標車道進路口;所述交通路口包括多個路口;
9、所述獲取所述每條候選路徑存在的至少兩條初始干擾路徑,包括:
10、獲取所述多個路口中分別存在的多個可行使路徑,所述可行使路徑包括:行駛車道出路口和行駛車道進路口;
11、根據(jù)目標車道出路口、目標車道進路口、行駛車道出路口和行駛車道進路口,在多個可行使路徑中確定至少一條初始干擾路徑。
12、可選的,所述根據(jù)所述動態(tài)障礙物的障礙物總數(shù)與預設數(shù)值的大小關系,在所述至少兩條初始干擾路徑中確定所述至少一條目標干擾路徑,包括:
13、針對每條初始干擾路徑中的所述動態(tài)障礙物,統(tǒng)計所述初始干擾路徑的動態(tài)障礙物的障礙物總數(shù),當確定所述障礙物總數(shù)大于預設數(shù)值時,確定所述初始干擾路徑為目標干擾路徑。
14、可選的,所述利用候選路徑對應的至少一條目標干擾路徑和轉彎曲率計算候選路徑的第二安全代價,包括:
15、將所述至少一條目標干擾路徑分別對應的代價進行求和計算,得到所述候選路徑的第一代價,其中,每條目標干擾路徑對應的代價為1;
16、利用所述轉彎曲率與預設曲率的大小關系,確定所述候選路徑的第二代價;
17、將所述第一代價與所述第二代價進行求和計算,得到所述第二安全代價。
18、可選的,所述利用所述轉彎曲率與預設曲率的大小關系,確定所述候選路徑的第二代價,包括:
19、當所述轉彎曲率大于所述預設曲率時,根據(jù)轉彎曲率以及預設曲率進行計算得到初始第三代價,確定初始第三代價與0之間的最大值為第三代價;或
20、當轉彎曲率小于或等于預設曲率時,確定第三代價為無窮大。
21、可選的,所述方法還包括:
22、獲取所述目標車輛距離所述目標車道出路口的目標距離;
23、當確定所述目標距離小于或等于預設距離時,獲取所述多條候選路徑分別對應的至少一條目標干擾路徑和轉彎曲率,其中,所述預設距離用于確定所述目標車輛是否能感知到交通路口的環(huán)境。
24、第二方面,本公開實施例提供一種車輛行駛路徑規(guī)劃裝置,包括:
25、候選路徑獲取模塊,用于獲取目標車輛在交通路口的目標車道上的多條候選路徑;
26、總安全代價確定模塊,用于針對多條候選路徑中的每條候選路徑,利用候選路徑中道路的靜態(tài)行駛信息計算候選路徑的第一安全代價,利用候選路徑對應的至少一條目標干擾路徑和轉彎曲率計算候選路徑的第二安全代價,根據(jù)所述第一安全代價以及所述第二安全代價,確定所述候選路徑的總安全代價;
27、目標行駛路徑確定模塊,用于確定所述總安全代價最小的所述候選路徑作為所述目標車輛的目標行駛路徑。
28、第三方面,本公開實施例提供了一種電子設備,包括:
29、一個或多個處理器;
30、存儲裝置,用于存儲一個或多個程序,
31、當所述一個或多個程序被所述一個或多個處理器執(zhí)行,使得所述一個或多個處理器實現(xiàn)如第一方面中任一所述的方法。
32、第四方面,本公開實施例提供一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執(zhí)行時實現(xiàn)如第一方面中任一所述的方法。
33、第五方面,本公開實施例提供了一種車輛,包括:處理器、存儲器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述計算機程序被所述處理器執(zhí)行時實現(xiàn)如第一方面中任一所述的方法。
34、本公開實施例提供的技術方案與現(xiàn)有技術相比具有如下優(yōu)點:
35、本公開實施例提供的車輛行駛路徑規(guī)劃方法,通過獲取目標車輛在交通路口的目標車道上的多條候選路徑;針對多條候選路徑中的每條候選路徑,利用候選路徑中道路的靜態(tài)行駛信息計算候選路徑的第一安全代價,利用候選路徑對應的至少一條目標干擾路徑和轉彎曲率計算候選路徑的第二安全代價,根據(jù)所述第一安全代價以及所述第二安全代價,確定所述候選路徑的總安全代價;確定所述總安全代價最小的所述候選路徑作為所述目標車輛的目標行駛路徑。在上述過程中,當目標車輛處于交通路口時,能夠根據(jù)動態(tài)獲取的目標車道存在的一條或多條目標干擾路徑,以及其對應的轉彎曲率,確定目標干擾路徑對目標車輛行駛過程中產生的第二安全代價,進一步結合第一安全代價和第二安全代價,在多條候選路徑確定目標行駛路徑,以此方式考慮到當目標車輛在交通路口時,對于候選路徑存在的干擾路徑,對目標車輛行駛過程中的安全性影響,提高目標車輛在行駛過程中的安全性。
- 還沒有人留言評論。精彩留言會獲得點贊!