用于自動駕駛的車輛的路線規劃的方法和系統與流程
本發明涉及一種用于自動駕駛的車輛的路線規劃的方法、一種用于執行該方法的存儲介質、一種用于自動駕駛的車輛的路線規劃的系統以及一種具有這種系統的車輛。本公開尤其涉及一種用于自動駕駛的一個或多個駕駛輔助功能的有效使用的路線計算。
背景技術:
1、用于自動駕駛的駕駛輔助系統變得越來越重要。自動駕駛可以利用不同的自動化程度來實現。示例性的自動化程度是輔助駕駛、半自動駕駛、有條件自動駕駛、高度自動駕駛或全自動駕駛。上述的五個自動化程度對應于根據2021年4月30日的sae?j3016(sae-汽車工程學會)標準的sae等級1至5。在全自動駕駛(sae等級5)中,該系統可以在任何車道和環境條件下執行動態駕駛任務的也由人類駕駛員操控的所有方面。
2、現今的選路系統能夠快速且有效地計算從起點到路線目的地的最佳路線以及到達時間和/或行程時間的預測。對于路線規劃,在此通常僅考慮路線區段的拓撲特性(例如轉彎關系)和動態特性(例如當前速度、施工現場)。通常不進行進一步的路線分析,這尤其可以結合用于自動駕駛的駕駛輔助系統,根據其功能特性導致低效率的路線規劃和/或在駕駛輔助系統的用戶方面的不滿。
技術實現思路
1、本公開的任務是,提供一種用于自動駕駛的車輛的路線規劃的方法、一種用于執行該方法的存儲介質、一種用于自動駕駛的車輛的路線規劃的系統以及一種具有這種系統的車輛,其能夠實現用于自動駕駛的車輛的有效的路線規劃。本公開的任務尤其是,能夠實現自動駕駛模式的最大可用性并且因此能夠實現可用的系統的魯棒性。
2、該任務通過獨立權利要求的主題解決。在從屬權利要求中說明了有利的設計方案。
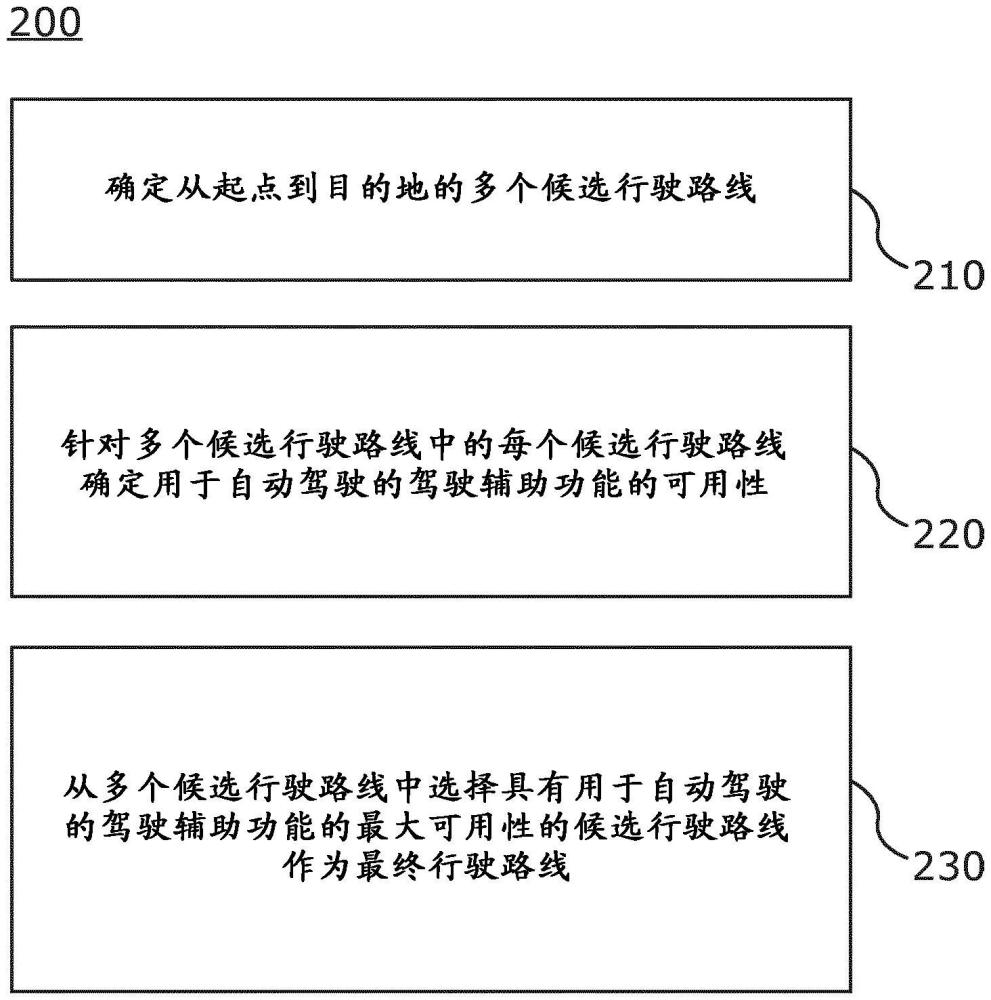
3、根據本公開的獨立方面,提供一種用于自動駕駛的車輛、尤其是機動車的路線規劃的方法。該方法包括確定從起點到目的地的多個候選行駛路線;針對多個候選行駛路線中的每個候選行駛路線確定用于自動駕駛的駕駛輔助功能的可用性;以及從多個候選行駛路線中選擇具有用于自動駕駛的駕駛輔助功能的最大可用性的候選行駛路線作為最終行駛路線。
4、根據本發明,在路線規劃中,關于用于自動駕駛的駕駛輔助功能的可用性來評估多個候選行駛路線。可選地也與最小風險相結合(例如可以避開在早上7點45分左右經過學校的行駛路線),從多個候選行駛路線中選擇提供駕駛輔助功能的最大可用性的行駛路線作為最終路線。因此,能夠實現用于自動駕駛的車輛的高效的路線規劃,由此可以提高用戶滿意度。此外,由于駕駛輔助功能的最大可用性可以提高交通安全,因為可以避免人為駕駛錯誤。
5、可選地,根據本發明的方法可以涉及多個輔助系統。例如,可以從輔助系統的不同的信號產生用于路線規劃的計算。在此,被學習的算法可以優化、例如也實時地優化路線規劃的計算。
6、在本文檔的范圍內,術語“自動駕駛”理解為具有自動縱向和/或橫向引導的駕駛。例如,自動駕駛可以是在特定的路線類型(如郊區道路、城市道路、高速公路、城市快速路、鄉村道路或城市街道)上的更長時間的駕駛,或者是在停車范圍內的在時間上有限的駕駛。術語“自動駕駛”包括具有任意的自動化程度的自動駕駛。示例性的自動化程度是輔助駕駛、半自動駕駛、有條件自動駕駛、高度自動駕駛和全自動駕駛(具有相應增大的自動化程度)。上述的五個自動化程度對應于根據2021年4月30日的sae?j3016(sae-汽車工程學會)標準的sae等級1至5。
7、在輔助駕駛(sae?1級)中,該系統在特定駕駛情況中執行縱向或橫向引導。在半自動駕駛(sae等級2)中,該系統在特定駕駛情況中承擔縱向和橫向引導,其中,駕駛員必須如在輔助駕駛中那樣持續監控該系統。在有條件自動駕駛(sae等級3)中,該系統在特定駕駛情況中承擔縱向和橫向引導,而駕駛員不必持續監控該系統;但是,駕駛員必須能夠在一定時間內根據系統要求承擔車輛引導。在高度自動駕駛(sae等級4)中,即使當駕駛員沒有對干預請求做出反應時,該系統也會在特定駕駛情況中承擔車輛引導,從而駕駛員不再作為后備存在。在全自動駕駛(sae等級5)中,該系統可以在任何車道條件和環境條件中執行動態駕駛任務的也由人類駕駛員操控的所有方面。
8、此外,在本文檔中的范圍內,術語“至少半自動駕駛或機動”也理解為半自動駕駛、有條件自動駕駛、高度自動駕駛、全自動駕駛。換言之,術語“至少半自動駕駛”理解為從sae等級2(含)開始的自動化程度。
9、優選地,在根據本發明的路線規劃中考慮的駕駛輔助功能設計用于根據sae等級2、sae等級3、sae等級4或sae等級5的自動駕駛。
10、優選地,用于路線規劃的方法使用選路算法。在這種選路算法中,例如可以做出路徑選擇,辦法是,針對每個可能的路徑利用加權因子計算決定標準(度量)。這也可能隨著運行時間而變化,因為算法從駕駛員的偏好中學習并且使用這些數據知識。
11、優選地,基于駕駛輔助功能或駕駛輔助系統的功能特性和/或駕駛輔助功能的運行設計域(odd)來確定用于自動駕駛的駕駛輔助功能的可用性。換言之,回答行駛路線或其路線區段是否適用于自動駕駛的問題可能與駕駛輔助功能或駕駛輔助系統的功能特性和/或odd相關(例如sae等級2、3或4)。與其他駕駛輔助功能或相應的功能特性相比,在駛過具有不同的特定車道寬度和/或不同的速度范圍(例如最小速度或最大速度)的道路時,一些駕駛輔助功能或相應的功能特性例如能夠實現輔助。
12、優選地,每個候選行駛路線包括多個路線區段,這些路線區段必要時在其路線特性(例如車道寬度、允許的最大速度等)中有所不同。尤其地,在起點與目的地之間存在多個候選行駛路線,其中,多個候選行駛路線中的每個行駛路線可以具有多個路線區段。多個候選行駛路線在此可以具有至少部分不同的路線區段。
13、針對候選行駛路線的多個路線區段中的每個路線區段可以確定的是,是否可以根據odd實現自動駕駛。例如由于路線特性、速度范圍和/或天氣條件,并非候選行駛路線的多個路線區段的每個路線區段例如可以適用于自動駕駛。根據本發明的路線規劃關于用于自動駕駛的可能性評估每個候選行駛路線的多個路線區段,從而最終將其路線區段總體上最大化用于自動駕駛的可用性的候選行駛路線確定為最終行駛路線。
14、優選地,確定從起點到目的地的多個候選行駛路線包括求取從起點到目的地的可能的行駛路線;以及基于至少一個選擇標準從可能的行駛路線中選擇多個候選行駛路線。因此,在可用性檢查之前已經可以立即對不合適的行駛路線進行分類,從而可以進一步改進路線規劃的效率。
15、優選地,從包括隨時間的選擇標準、路線特定的選擇標準和駕駛員個體化的選擇標準或由其組成的組中選擇至少一個選擇標準。
16、隨時間的選擇標準例如可以是在目的地處的(例如最晚的)到達時間和/或最大行駛持續時間或行程時間。在另外的示例中,最快路線可以用作參考,以便從可能的行駛路線中選擇多個候選行駛路線。例如,可以分類所有行駛路線,其估計的行駛持續時間或行程時間是最快行駛路線的行駛持續時間或行程時間的x倍。x在此大于1,并且可以是整數(例如2)或有理數(例如1.5)。
17、路線特定的選擇標準例如可能與道路狀態相關。例如可以對所有行駛路線進行分類,其(至少區段式的)道路狀態例如由于坑洼和/或礫石表面而對車輛和/或駕駛員是不利的。
18、駕駛員個體化的選擇標準可以包括駕駛員的偏好。例如可能已知的是,駕駛員避開特定的道路類別、例如高速公路。在該情況下,可以對所有行駛路線進行分類,其(至少區段式地)包括這種道路類別。
19、優選地,用于自動駕駛的駕駛輔助功能的可用性是與時間相關的可用性或與距離相關的可用性。與時間相關的可用性在此涉及行駛持續時間或行程時間的能夠實現自動駕駛的時間段。相反,與距離相關的可用性涉及能夠實現自動駕駛的行駛距離或行駛路線。
20、優選地,基于存儲在車輛中和/或由車輛收集的內部信息來確定用于自動駕駛的駕駛輔助功能的可用性。存儲在車輛中的信息例如可以包括但不限于數字地圖數據、關于行駛路線的歷史信息、關于駕駛員的偏好的信息等。通過車輛收集的信息可以包括但不限于關于行駛路線的歷史信息、關于駕駛員的偏好的(歷史)信息等。
21、補充地或備選地,基于由至少一個外部單元提供給車輛的外部信息來確定用于自動駕駛的駕駛輔助功能的可用性。例如,至少一個外部單元可以包括或是中央單元、例如后端和/或至少一個其他車輛。在一些實施方式中,術語“中央單元”還包括基礎設施到x,即例如來自城市所安裝的控制單元的信號。
22、車輛可以經由通信連接與至少一個外部單元連接,以便接收外部信息。通信連接例如可以借助移動網絡(如lte網絡或5g網絡)來實現。在另外的示例中,car2car通信可以用于直接從其他車輛接收外部信息。
23、優選地,外部信息由車隊提供。尤其地,車隊的車輛可以將與根據本發明的可用性檢查相關的數據(例如在特定的路線區段上的系統崩潰)傳遞至后端。后端可以收集數據并且在需要時提供給另外的車輛用以進行根據本發明的可用性檢查。
24、優選地,基于沿候選行駛路線的道路類別(例如根據功能道路等級frc,利用根據低的frc1的優先級排序)確定用于自動駕駛的駕駛輔助功能的可用性。
25、補充地或備選地,可以基于候選行駛路線上的交叉口特性,例如基于交叉口處的交通燈的存在、交叉口處的左轉或右轉、交叉口處的轉彎車道的存在等,確定用于自動駕駛的駕駛輔助功能的可用性。
26、補充地或備選地,可以基于沿候選行駛路線的轉彎情況、例如基于左轉或右轉、轉彎車道的存在等,確定用于自動駕駛的駕駛輔助功能的可用性。例如,可以在不左轉的情況下對路線區段或行駛路線進行優先級排序。
27、補充地或備選地,可以基于沿候選行駛路線的駕駛輔助功能釋放來確定用于自動駕駛的駕駛輔助功能的可用性。例如可以執行與關于adas系統(高級駕駛輔助系統)的道路清暢的存儲的信息的比較,其中,可以執行對釋放的路線區段的優先級排序。
28、補充地或備選地,可以基于沿候選行駛路線的交通流量來確定用于自動駕駛的駕駛輔助功能的可用性。優選地,交通流量被劃分為機動交通流量(乘用車、卡車等)和非機動交通流量(行人、騎自行車的人等)。在一些實施方式中,可以對具有小的非機動交通流量的路線區段進行優先級排序。例如,在特定的時間可以避開學校周圍的路線區段。
29、補充地或備選地,可以基于沿候選行駛路線的平均速度來確定用于自動駕駛的駕駛輔助功能的可用性。例如,具有用于3級速度范圍的可用性的路線區段或相應的行駛路線可以被優先級排序。
30、補充地或備選地,可以基于候選行駛路線上的轉彎半徑來確定用于自動駕駛的駕駛輔助功能的可用性。例如可能的是,利用一些駕駛輔助功能無法自動駛過具有定義的設置或推薦速度的較窄的轉彎半徑,從而可以避開具有這種較窄的轉彎半徑的路線區段。
31、補充地或備選地,可以基于用于自動駕駛的駕駛輔助功能沿候選行駛路線的強制停用場景來確定用于自動駕駛的駕駛輔助功能的可用性。強制停用在此是指由于當前情況而終止自動駕駛并將車輛引導轉移至駕駛員。
32、例如,可以避開可能導致強制停用駕駛輔助的路線區段。例如,由于天氣條件(例如溫度、降水、風等)、氣候條件(例如潮濕、濕滑、雪、地面霜凍等)和/或道路條件(例如道路特性、地面標記的質量、車道寬度等),可能實現強制停用。
33、補充地或備選地,可以基于用于自動駕駛的駕駛輔助功能沿候選行駛路線的歷史停用來確定用于自動駕駛的駕駛輔助功能的可用性。例如,從車隊數據中可能已知經常發生強制停用的路線區段。這種路線區段可以被避開。
34、補充地或備選地,可以基于沿候選行駛路線的太陽位置來確定用于自動駕駛的駕駛輔助功能的可用性。例如可能的是,基于攝像頭的環境傳感器系統在低的太陽位置和直接的光輻射的情況下不再提供穩健的環境識別,從而可以導致強制停用駕駛輔助功能。因此,可以避開太陽位置可能導致這種強制停用的路線區段。
35、優選地,該方法還包括輸出關于最終行駛路線的駕駛員指示。尤其地,可以向駕駛員建議最終行駛路線。駕駛員可以選擇或確認最終行駛路線,由此,例如開始目的地引導。為了通過駕駛員手動選擇行駛路線,可以向駕駛員提供關于每個行駛路線的駕駛輔助的可用性的信息,例如關于可用性的持續時間和/或路線的預測。
36、優選地,車輛包括用于輸出駕駛員指示的至少一個輸出裝置。至少一個輸出裝置可以包括至少一個顯示裝置和/或至少一個揚聲器。至少一個顯示裝置可以包括顯示器、尤其是lcd顯示器、等離子顯示器或oled顯示器。補充地或備選地,至少一個顯示裝置可以包括投影裝置,該投影裝置設計用于直接在駕駛員的視野中顯示信息,尤其是將其投影到擋風玻璃上。在一些實施方式中,至少一個輸出裝置可以是信息娛樂系統的中央信息輸出裝置、例如主機單元或柱對柱顯示器。優選地,至少一個輸出裝置固定安裝在車輛中。
37、優選地,方法還包括通過車輛的環境傳感器系統檢測環境數據;以及基于環境數據沿最終行駛路線(或在最終行駛路線的適用于自動駕駛的路線區段上)執行自動駕駛。因此,車輛的環境數據或相應的基于傳感器的環境模型可以形成影響因素,例如以便防止車輛與對象或其他道路參與者的碰撞。
38、優選地,環境傳感器系統包括至少一個lidar系統和/或至少一個雷達系統和/或至少一個攝像頭和/或至少一個超聲波系統和/或至少一個激光掃描儀。環境傳感器系統可以提供描繪車輛的環境區域的環境數據(也被稱為“周圍數據”)。
39、優選地,該方法還包括操控自動駕駛的車輛,使得車輛跟隨最終行駛路線或最終行駛路線的適用于自動駕駛的路線區段。尤其地,車輛可以跟隨最終行駛路線,辦法是,車輛將其當前位置與規劃位置進行比較并且適配轉向和/或速度。
40、根據本公開的另外的獨立方面,說明一種軟件(sw)程序。軟件程序可以設計用于在一個或多個處理器上執行,并且由此執行在本文檔中描述的用于自動駕駛的車輛的路線規劃的方法。
41、根據本公開的另外的獨立方面,說明一種存儲介質。存儲介質可以包括軟件程序,該軟件程序設計用于在一個或多個處理器上執行,并且由此執行在本文檔中描述的用于自動駕駛的車輛的路線規劃的方法。
42、根據本公開的另外的獨立方面,說明一種具有程序代碼的軟件。當軟件在一個或多個軟件控制的裝置上運行時,該軟件設計用于執行用于自動駕駛的車輛的路線規劃的方法。
43、根據本公開的另外的獨立方面,說明一種用于自動駕駛的車輛的路線規劃的系統。該系統包括一個或多個處理器;和至少一個存儲器,該存儲器與一個或多個處理器連接并包含由一個或多個處理器可執行的指令,以便執行在本文檔中描述的用于自動駕駛的車輛的路線規劃的方法。
44、尤其地,該系統設計用于執行在本文檔中描述的用于自動駕駛的車輛的路線規劃的方法。該方法可以實現在本文檔中描述的系統的多個方面。
45、處理器或處理器模塊是可編程的計算單元,即根據給定的命令控制其他元件并在此推進算法(過程)的機器或電子電路。
46、優選地,該系統是用于自動駕駛的駕駛輔助系統,或者至少部分包括在這種駕駛輔助系統中,或者與駕駛輔助系統通信連接。
47、優選地,整個系統集成在車輛中。然而,本公開不局限于此,并且系統的一部分或整個系統、例如用于根據本發明的路線規劃的選路模塊可以在車輛外部實現,例如在中央單元或后端中實現。在該情況下,在車輛與中央單元之間可能存在通信連接,以便將車道精確的路線傳遞到車輛并且能夠實現駕駛輔助系統的在本文檔中描述的功能。通信連接例如可以借助移動網絡(如lte網絡或5g網絡)實現。
48、根據本公開的另外的獨立方面,說明一種車輛、尤其是機動車。該車輛包括根據本公開的實施方式的用于自動駕駛的車輛的路線規劃的系統和/或用于自動駕駛的駕駛輔助系統。
49、術語車輛包括乘用車、卡車、公共汽車、房車、摩托車等,其用于運送人員、貨物等。尤其地,該術語包括用于運送人員的機動車。
- 還沒有人留言評論。精彩留言會獲得點贊!