一種機(jī)載光電平臺慣性測量單元標(biāo)定方法與流程
本發(fā)明涉及精密光機(jī)裝調(diào),特別提供了一種機(jī)載光電平臺慣性測量單元標(biāo)定方法。
背景技術(shù):
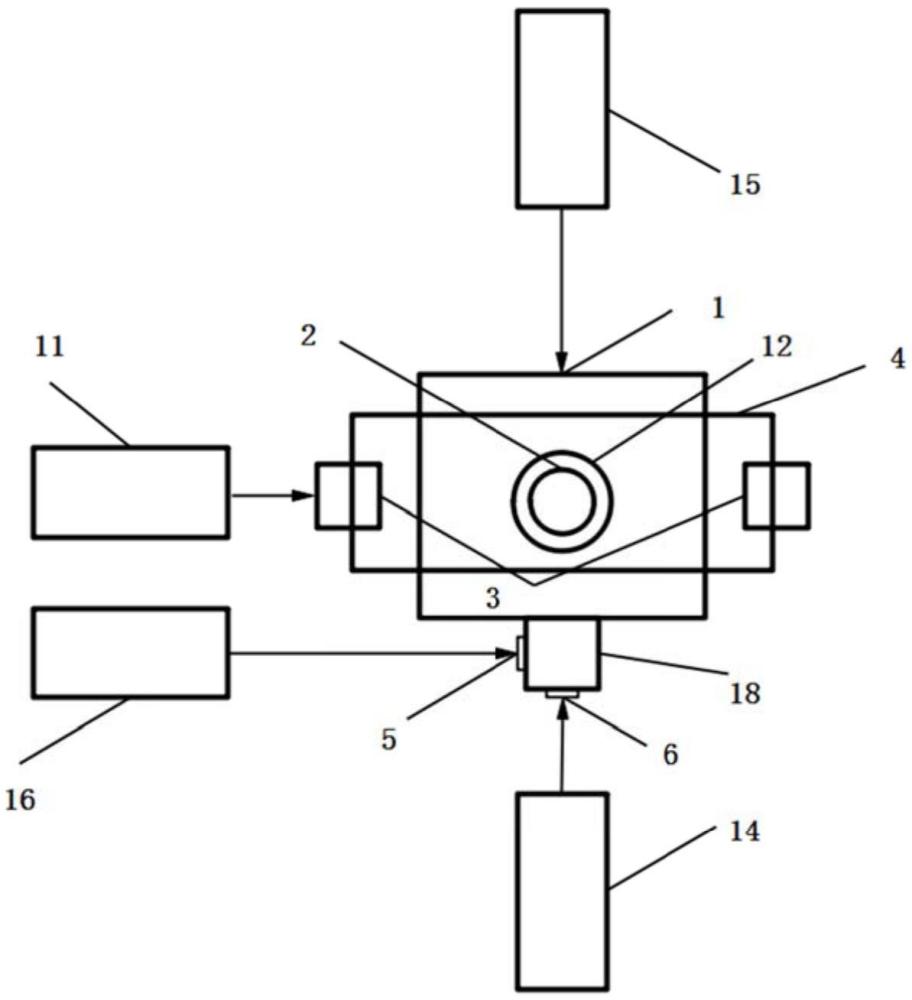
1、目前機(jī)載光電探測及對抗領(lǐng)域載荷設(shè)備多采用兩軸兩框或兩軸四框的構(gòu)型設(shè)計,比較普遍的為多波段傳感器高度集成于穩(wěn)定平臺之上,該平臺通過方位軸系與俯仰軸系與外殼體相連接,經(jīng)過兩軸系的回轉(zhuǎn)達(dá)到空間任意位置的轉(zhuǎn)向及探測。一般機(jī)載光電平臺構(gòu)型見附圖1所示,其主要由光電穩(wěn)定平臺1、方位軸系2、俯仰軸系3、俯仰框架4組成,方位軸系2與俯仰軸系3分別由兩個半軸共同組成,各自存在自己的回轉(zhuǎn)軸線,此回轉(zhuǎn)軸線在空間位置上存在相交與垂直關(guān)系,可分別進(jìn)行檢測及調(diào)校。同時為了后續(xù)平臺光軸的可識別及可監(jiān)控性,在進(jìn)行平臺裝配時,預(yù)留了光軸識別基準(zhǔn)反射面。此反射面進(jìn)行過精密調(diào)校及固定,后續(xù)作為平臺光學(xué)系統(tǒng)的光軸基準(zhǔn)。
2、根據(jù)導(dǎo)航控制原理,飛機(jī)等慣性導(dǎo)航設(shè)備均需要進(jìn)行運動控制,其姿態(tài)需要進(jìn)行精密位移推算,裝配慣性測量單元屬捷聯(lián)式慣導(dǎo),可分別提供角速度及加速度信息。慣性測量單元為測量物體三軸姿態(tài)角或者角速率以及加速度的一種裝置。一般性慣性測量單元包含三個單軸加速度計和三個單軸陀螺,其中,加速度計用來檢測物體在載體坐標(biāo)系中獨立三軸的加速度信號,陀螺用來檢測載體相對于導(dǎo)航坐標(biāo)系的角速度信號,通過測量物體在三維空間中的角速度和加速度,據(jù)此來解算物體空間姿態(tài),在導(dǎo)航中具備重要的應(yīng)用價值。一般慣性測量單元安裝在機(jī)載光電穩(wěn)定平臺重心上,初步裝配后該測量單元與軸系和光軸組成的坐標(biāo)系存在偏角誤差。因此,需要精確測量出此誤差,對慣性測量單元進(jìn)行誤差標(biāo)定。
技術(shù)實現(xiàn)思路
1、本技術(shù)的目的在于提供一種機(jī)載光電平臺慣性測量單元標(biāo)定方法,該方法通過機(jī)載平臺方位俯仰兩軸系位置相交度的檢測及調(diào)校、兩軸系的回轉(zhuǎn)精度檢測及回轉(zhuǎn)軸標(biāo)定、兩軸系的垂直度檢測及調(diào)校、平臺光軸與軸系的正交性檢測與調(diào)校及慣性測量單元坐標(biāo)系誤差標(biāo)定對慣性測量單元進(jìn)行標(biāo)定。
2、為了實現(xiàn)上述目的,本發(fā)明采用如下技術(shù)方案:一種機(jī)載光電平臺慣性測量單元標(biāo)定方法,所述機(jī)載光電平臺包括光電穩(wěn)定平臺、設(shè)置在光電穩(wěn)定平臺上的方位軸系、俯仰軸系和俯仰框架,所述方位軸系與所述俯仰軸系分別由兩個半軸組成,各自存在回轉(zhuǎn)軸線,回轉(zhuǎn)軸線在空間位置上存在相交與垂直關(guān)系,所述方法包括:
3、s1:對機(jī)載平臺方位俯仰軸系位置相交度進(jìn)行檢測及調(diào)校;
4、s2:對機(jī)載平臺方位俯仰軸系回轉(zhuǎn)軸進(jìn)行標(biāo)定及精度檢測;
5、s3:對機(jī)載平臺方位俯仰軸系垂直度進(jìn)行檢測及調(diào)校;
6、s4:對光電平臺光軸與軸系正交性檢測及調(diào)校;
7、s5:對慣性測量單元坐標(biāo)系偏差進(jìn)行標(biāo)定。
8、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s1包括:
9、s1.1:將機(jī)載光電平臺通過調(diào)校支撐工裝架設(shè)在大理石平臺上,方位軸系兩側(cè)軸系水平放置;
10、s1.2:使用測高儀檢測方位軸系兩側(cè)半軸回轉(zhuǎn)軸中心高度,調(diào)整光電穩(wěn)定平臺姿態(tài),使方位軸線與大理石平臺平面平行;
11、s1.3:使用測高儀檢測俯仰軸系兩側(cè)半軸回轉(zhuǎn)軸中心高度,通過上下轉(zhuǎn)動調(diào)整俯仰軸系兩側(cè)半軸高度相同,記錄中心至測高儀平面垂直高度h1;
12、s1.4:繞方位軸系軸線,逆時針轉(zhuǎn)動俯仰軸系半軸180°,重復(fù)s1.3記錄中心至測高儀平面調(diào)整垂直高度h2;
13、s1.5:計算中心至測高儀平面垂直高度h1與中心至測高儀平面調(diào)整垂直高度h2的差值,該差值h1-h2為軸系位置相交度。
14、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s1還包括對軸系位置相交度與機(jī)載光電平臺方位俯仰軸系位置相交度指標(biāo)進(jìn)行對比,若不滿足指標(biāo)要求,則調(diào)整俯仰軸系兩側(cè)半軸軸系位置后重復(fù)s1.3-s1.5。
15、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s2包括:
16、s2.1:將轉(zhuǎn)接工裝裝配至方位軸系和俯仰軸系對應(yīng)一側(cè)半軸上,使方位軸系與俯仰軸系連接緊固;
17、s2.2:將多維可調(diào)反射鏡對應(yīng)轉(zhuǎn)接在轉(zhuǎn)接工裝上,分別將第一光電自準(zhǔn)直光管和第二光電自準(zhǔn)直光管架設(shè)在所述多維可調(diào)反射鏡前方工作距離上,通過多維可調(diào)反射鏡的激光準(zhǔn)直尋像器進(jìn)行粗準(zhǔn)直,調(diào)整第一光電自準(zhǔn)直光管和第二光電自準(zhǔn)直光管,使多維可調(diào)反射鏡自準(zhǔn)像進(jìn)入檢測視場;
18、s2.3:精調(diào)第一光電自準(zhǔn)直光管和第二光電自準(zhǔn)直光管自準(zhǔn)像至中心位置,勻速轉(zhuǎn)動軸系,實時采集像點,畫出擬合圓,獲取角偏回轉(zhuǎn)精度;
19、s2.4:調(diào)整多維可調(diào)反射鏡的方位和俯仰角度,使像點往圓心位置移動,重復(fù)s2.3直至角偏回轉(zhuǎn)精度最小,此時多維可調(diào)反射鏡面法線即回轉(zhuǎn)軸軸線,完成方位俯仰軸系回轉(zhuǎn)軸進(jìn)行標(biāo)定及精度檢測。
20、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s3包括:在第一光電自準(zhǔn)直光管和第二光電自準(zhǔn)直光管相交處放置五棱鏡,五棱鏡入射面與第一光電自準(zhǔn)直光管準(zhǔn)直,光束通過五棱鏡出射后通過第二光電自準(zhǔn)直光管觀測,此時自準(zhǔn)像偏差值即為軸系垂直度偏差。
21、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s3還包括通過調(diào)整方位軸系位置調(diào)整軸系垂直度偏差。
22、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s4包括:
23、s4.1:在慣性測量單元外部設(shè)置兩反射面代替其工作軸線,兩反射面包括測量單元第一軸線基準(zhǔn)光學(xué)反射面和測量單元第二軸線基準(zhǔn)光學(xué)反射面;
24、s4.2:在第一光電自準(zhǔn)直光管前方放置五棱鏡,調(diào)整五棱鏡入射面與第一光電自準(zhǔn)直光管準(zhǔn)直,保證五棱鏡出射光束與入射光束在同一水平面內(nèi),出射光束后方架設(shè)第三光電自準(zhǔn)直光管,所述第三光電自準(zhǔn)直光管安裝于測量單元第二軸線基準(zhǔn)光學(xué)反射面包絡(luò)區(qū)域,調(diào)整第三光電自準(zhǔn)直光管,使其與第一光電自準(zhǔn)直光管正交準(zhǔn)直;
25、s4.3:移除五棱鏡,在第三光電自準(zhǔn)直光管前架設(shè)第四光電自準(zhǔn)直光管,調(diào)整第四光電自準(zhǔn)直光管方位俯仰角度,使其與第三光電自準(zhǔn)直光管準(zhǔn)直;
26、s4.4:在第一光電自準(zhǔn)直光管前架設(shè)大口徑標(biāo)準(zhǔn)平面鏡,大口徑標(biāo)準(zhǔn)平面鏡與第一光電自準(zhǔn)直光管準(zhǔn)直,在測量單元第一軸線基準(zhǔn)光學(xué)反射面包絡(luò)區(qū)域架設(shè)第五光電自準(zhǔn)直光管,調(diào)整第五光電自準(zhǔn)直光管,使其與大口徑標(biāo)準(zhǔn)平面鏡準(zhǔn)直,則光電平臺光軸與軸系正交性檢測調(diào)校完成。
27、本發(fā)明所提供的機(jī)載光電平臺慣性測量單元標(biāo)定方法,還具有這樣的技術(shù)特征,所述s5包括:
28、s5.1:在光電穩(wěn)定平臺重心位置安裝慣性測量單元,裝配完成后放置于二維調(diào)整平臺;
29、s5.2:調(diào)整二維平臺方位俯仰角度,使第一光電自準(zhǔn)直光管與第二光電自準(zhǔn)直光管分別與多維可調(diào)反射鏡準(zhǔn)直;
30、s5.3:調(diào)整光電穩(wěn)定平臺位置,使其光軸識別基準(zhǔn)反射面與第四光電自準(zhǔn)直光管準(zhǔn)直;
31、s5.4:通過第三光電自準(zhǔn)直光管與第五光電自準(zhǔn)直光管直接觀測慣性測量單元的第一軸線基準(zhǔn)光學(xué)反射面和第二軸線基準(zhǔn)光學(xué)反射面偏差值,反饋給數(shù)據(jù)處理分系統(tǒng),完成慣性測量單元的偏差標(biāo)定。
32、有益效果
33、本發(fā)明所提供的方法前后進(jìn)行了機(jī)載平臺方位俯仰兩軸系位置相交度的檢測及調(diào)校,兩軸系的回轉(zhuǎn)精度檢測及回轉(zhuǎn)軸標(biāo)定,兩軸系的垂直度檢測及調(diào)校,平臺光軸與軸系的正交性檢測與調(diào)校,慣性測量單元坐標(biāo)系誤差標(biāo)定等。通過上述一系列的光機(jī)調(diào)校步驟,同時完成了機(jī)載平臺的軸系精密調(diào)整及慣性測量單元的偏差標(biāo)定,實現(xiàn)了機(jī)載光電平臺軸系與光軸的正交坐標(biāo)系調(diào)整與定位,測試出慣性測量單元與此正交坐標(biāo)系的偏差值,進(jìn)而反饋給數(shù)據(jù)處理分系統(tǒng)實現(xiàn)幾何空間相關(guān)解算。
- 還沒有人留言評論。精彩留言會獲得點贊!