RIS輔助FMCW雷達的非視距目標測距測速方法
本發明涉及非視距范圍目標探測,具體涉及ris輔助fmcw雷達的非視距目標測距測速方法。
背景技術:
1、基于fmcw雷達的非視距目標探測技術主要是基于電磁波在墻體等介質表面的反射、衍射等非直視多路徑傳播的特性,實現對城市街角、車輛遮擋區域等視覺盲區內遮蔽目標的有效檢測、定位和識別,在智能駕駛等領域具有重大的應用價值。fmcw雷達、遮擋物及目標三者之間的幾何位置關系與回波信號的幅頻特性將產生強相關性,因此如何根據實際探測場景建立非視距目標的傳播回波模型,是實現fmcw雷達非視距目標探測的重要前提。
2、智能超表面(reconfigurable?intelligent?surface,ris)是一種低成本、易部署的電磁表面結構,可提供虛擬視距路徑并定向增強波束強度。ris輔助的fmcw雷達可充分利用ris的空間自由度,將位于非視距的遮蔽目標“移至”視距區域,顯著提高非視距場景中非視距目標測距測速能力。
3、現有ris輔助雷達的非視距目標探測方法往往需要聯合優化發射/接收單元與ris反射單元,且沒有考慮fmcw,其目標測距測速的準確度相對較差。
技術實現思路
1、為了解決目標測距測速的準確度較差的技術問題,本發明提出了一種ris輔助fmcw雷達的非視距目標測距測速方法,能夠實現非視距區域目標的高精度定位,并對目標距離、速度參數進行估計。
2、本發明提供了一種ris輔助fmcw雷達的非視距目標測距測速方法,該方法包括:
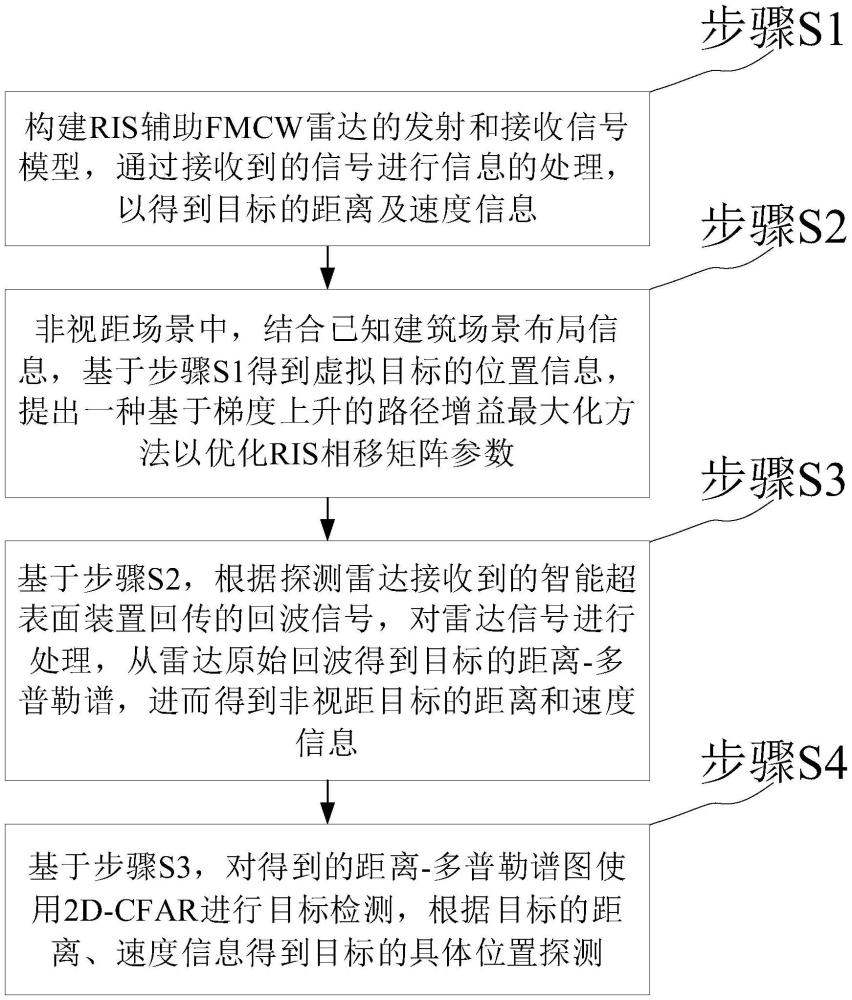
3、步驟s1,構建ris輔助fmcw雷達的發射和接收信號模型,通過接收到的信號進行信息的處理,以得到目標的距離及速度信息;
4、步驟s2,非視距場景中,結合已知建筑場景布局信息,基于步驟s1得到虛擬目標的位置信息,提出一種基于梯度上升的路徑增益最大化方法以優化ris相移矩陣參數;
5、步驟s3,基于步驟s2,根據探測雷達接收到的智能超表面裝置回傳的回波信號,對雷達信號進行處理,從雷達原始回波得到目標的距離-多普勒譜,進而得到非視距目標的距離和速度信息;
6、步驟s4,基于步驟s3,對得到的距離-多普勒譜圖使用2d-cfar進行目標檢測,根據目標的距離、速度信息得到目標的具體位置探測。
7、可選地,所述構建ris輔助fmcw雷達的發射和接收信號模型,通過接收到的信號進行信息的處理,以得到目標的距離及速度信息,包括:
8、設定仿真和實測場景均采用毫米波雷達,雷達發射的信號為線性調頻信號,設定雷達的初始頻率為f0,調頻帶寬為b,調頻周期為tm,則時刻t(0≤t≤tm)發射信號的頻率表示為ft(t)=f0+μt;其中,μ=b/tm表示調頻斜率,根據頻率求出發射信號的相位故發射信號表示為:
9、
10、其中,at為發射信號幅度;
11、設和分別是從發射端到ris,ris到接收端的通道;ris對入射信號的相位偏移量進行處理,即在t0時刻,接收信號表示為:
12、
13、其中,τ為信號時延,是零均值加性高斯噪聲,diag表示對相位偏移矩陣提取對角元素,n表示ris的元件數,表示相位偏移矩陣中的每個元素,θ表示信號與ris法線方向的夾角;噪聲的方差由接收機噪聲系數nf和接收機帶寬b來計算,其對應的公式為:
14、
15、其中,k為玻爾茲曼常數,t0為接收機參考溫度,t0=290k;k表示信號在空間傳播過程中的損耗,表示為:
16、
17、其中,c為光速,λ為信號工作波長,σ為目標的rcs,gt和gr分別為雷達發射與接收天線增益,ls為雷達發射接收綜合損耗;
18、發射端和接收端的電磁波信號通過混頻器混頻為中頻信號;對于線性調頻來說,差頻的頻率即攜帶著目標的距離信息;在t0時刻,接收信號與發射信號混頻,得到差拍信號對應的公式為:
19、
20、可選地,所述非視距場景中,結合已知建筑場景布局信息,基于步驟s1得到虛擬目標的位置信息,提出一種基于梯度上升的路徑增益最大化方法以優化ris相移矩陣參數,包括:
21、為獲取θ=[θ1,…,θn]t的最優值,提出一種路徑增益最大化準則,即最大化信號傳輸路徑的增益ψ(θ)=tr{(gφh)h(gφh)},則θ的優化表示為:
22、
23、設θ(l)表示第l次迭代獲得的θ值,通過對函數上當前點對應梯度的正方向的規定步長進行迭代搜索,執行以下步驟:
24、給θ設置恰當的初值;
25、給定θ的值,計算對應的梯度為其對應的公式為:
26、
27、其中,en是第n項為1,其他項為零的基向量;進一步表示為:
28、
29、對參數進行更新,其對應的公式為:
30、其中,α為步長因子;
31、重復上述步驟,直至達到收斂精度為止。
32、可選地,所述基于步驟s2,根據探測雷達接收到的智能超表面裝置回傳的回波信號,對雷達信號進行處理,從雷達原始回波得到目標的距離-多普勒譜,進而得到非視距目標的距離和速度信息,包括:
33、利用基于梯度上升的路徑增益最大化方法獲取最優θ后,對目標的距離和速度進行解算;中頻信號是一個幅度隨時間變化的正弦波,其頻率是恒定的,初始相位是中頻信號起始時刻對應的發射信號與回波信號的相位差,其對應的公式為:
34、
35、當雷達距離探測目標為r時,其中頻信號表示為:
36、
37、其中fb=μτ=μ2r/c;
38、對于中頻信號的頻率差fb,通過對其中頻信號做快速傅里葉變換得到;探測目標的距離r表示為:
39、
40、距離頻率fb通過對每個掃描周期內的差拍信號序列執行fft操作估計得到;
41、對于一個運動的物體,每個調頻連續波的距離fft將在同一位置出現峰值,但其相位不同,即頻譜在同一位置處有相位不同的峰值,其相位差為:
42、
43、目標的速度對應的公式為:
44、
45、當相位差|δφ|<π時才具有非模糊性,結合相位差和速度得:
46、
47、間接地,最大速度滿足vmax=λ/4tc。
48、可選地,所述基于步驟s3,對得到的距離-多普勒譜圖使用2d-cfar進行目標檢測,根據目標的距離、速度信息得到目標的具體位置探測,包括:
49、對于從雷達原始回波得到目標的距離-多普勒譜進行檢測恒虛警檢測,采用二維滑動參考窗的ca?cfar方法識別rdm;
50、假設有一個平方律檢測器,將rdm內接收到的信號幅度平方值作為隨機模型中的隨機變量,用xm,w表示,其中m為目標距離指數,w為多普勒頻率指數;測試單元內的隨機變量總是用y表示,計算出的閾值用參數t來描述;目標檢測過程基于假設檢驗,其中h0是噪聲情況下的假設,h1描述了目標與噪聲疊加的情況;
51、目標檢測過程表示為:
52、
53、在h0假設下,假設測試單元內的隨機變量為噪聲信號,用y0表示;在平方律檢測器中,隨機變量y0呈指數分布,概率密度函數用pdf表示,平均噪聲功率表示為ζ,平方律檢測器對應的公式為:
54、
55、根據neyman-pearson準則對應的公式為:
56、t=β·ζ
57、其中平均噪聲功率e{x|h0}=ζ,控制虛警概率pfa的閾值因子為β;
58、二維單元平均cfar是第一種估計局部環境內和參考窗口內的時間依賴性噪聲地板的方法;在這種情況下,基于二維參考窗口內所有隨機變量的算術平均值,自適應地估計了未知的局部噪聲期望值e{x|h0}=ζ;
59、
60、為了滿足所需的pfa,決策閾值為:
61、
62、其中βca為閾值因子,為算術平均值的估計平均噪聲下限;閾值因子βca取決于所需的pfa和用于噪聲功率估計的參考窗口內的單元數;
63、
64、本發明具有如下有益效果:
65、本發明公開了一種ris輔助fmcw雷達的非視距目標測距測速方法,首先,構建ris輔助fmcw雷達的發射和接收信號模型,分析發射和接收信號之間的頻率差異。其次,提出一種基于梯度上升的路徑增益最大化(pgm)方法以優化ris相移矩陣參數。接著,對雷達信號進行處理,從雷達原始回波得到目標的距離-多普勒譜,進而得到非視距目標的距離和速度信息。最后,對得到的距離-多普勒譜圖使用2d-cfar進行目標檢測,根據目標的距離、速度信息得到目標的具體位置。本發明的方法能夠實現非視距目標距離和速度參數的有效估計,獲取不同距離和速度下雷達回波信號的特性,為非視距區域下的目標探測技術提供有力保障,從而提高了目標測距測速的準確度。
- 還沒有人留言評論。精彩留言會獲得點贊!