一種基于多孔衍射干涉的多維誤差測量裝置及方法與流程
本申請涉及裝備測量領域,特別是涉及一種基于多孔衍射干涉的多維誤差測量裝置及方法。
背景技術:
1、隨著現代制造業的發展,高端數控機床、高精度三坐標測量機等包含多軸運動機構的精密裝備在精密制造行業中的地位愈發重要。空間幾何位置精度是評價此類精密裝備的關鍵指標之一。
2、目前,針對高端數控機床、高精度三坐標測量機等精密裝備在工作過程中由于運動軸結構的加工誤差、摩擦效應等因素會導致軸在移動時左右上下等形式跳動,造成關鍵元件的目標位姿和實際位姿之間出現多維偏差。這些空間幾何位置誤差會導致出現嚴重的特征位姿誤差或運動輪廓偏差,進而使機床加工工件尺寸、形狀或者測量機測量結果出現多維誤差。因此,針對運動單元多維誤差的高精度測量與補償具有十分重要的科學意義,并在精密儀器設備領域具有十分廣泛的應用前景。
3、目前針對精密裝備進行誤差測量方法中,激光跟蹤儀具有操作簡單、測量速度快、測量范圍大等優點。但現有的跟蹤儀大多只能進行單靶球測量,在測量空間誤差時不可避免的放大了人為誤差和重復性誤差的影響。而雖然激光干涉儀可以對各個自由度的誤差進行高精度測量,但是激光干涉儀一次只能測量一個方向誤差且滾擺(繞線性平臺軸向轉動角度)誤差無法測量。雷尼紹的多光束干涉儀在六自由度誤差測量方面具有顯著優勢,可以一次測量多個自由度誤差,但是其價格昂貴且對光源穩定性與環境干擾敏感,軟件系統不開放且只兼容部分控制系統。
4、因此,如何高精度、低成本地實現裝備多維誤差測量成為目前亟待解決的問題。
技術實現思路
1、本申請的目的是提供一種基于多孔衍射干涉的多維誤差測量裝置及方法,可高精度、低成本地實現裝備多維誤差(即多自由度位姿變化)的測量。
2、為實現上述目的,本申請提供了如下方案:
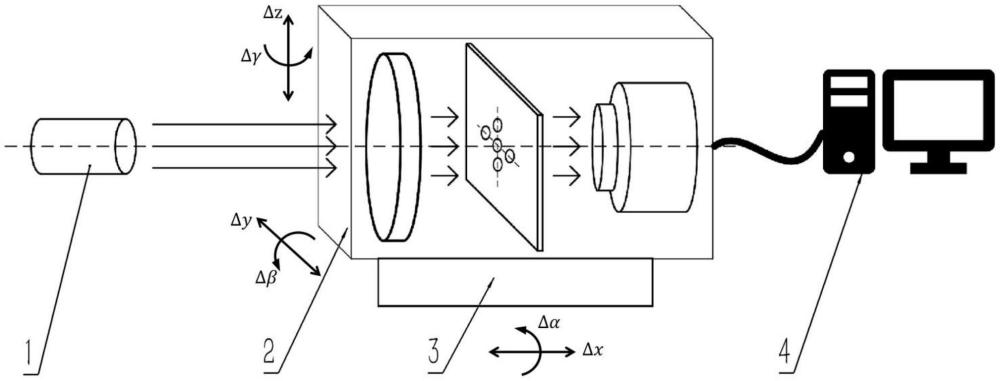
3、第一方面,本申請提供了一種基于多孔衍射干涉的多維誤差測量裝置,包括:激光源、測量組件和計算模塊;所述測量組件包括:衍射孔板;
4、所述測量組件固定在目標裝備上;所述測量組件的軸線方向與所述目標裝備的軸線方向平行;所述目標裝備用于在空間進行多自由度移動時,帶動所述測量組件進行多自由度移動;所述激光源與所述測量組件處于同一軸線方向;所述衍射孔板上設置多個衍射孔隙;多個所述衍射孔隙分布在與光軸正交的平面的水平方向和垂直方向;
5、所述激光源用于發出激光;所述激光用于通過所述衍射孔板上的多個衍射孔隙后形成多孔衍射干涉圖像;
6、所述計算模塊用于獲取所述目標裝備在空間進行多自由度移動過程中的多孔衍射干涉圖像,根據位姿識別模型和采集到多孔衍射干涉圖像得到所述目標裝備的多自由度位姿變化,并對所述多自由度位姿變化進行補償,將補償后的多自由度位姿變化確定為所述目標裝備的多維誤差;所述位姿識別模型是基于機器學習模型構建的。
7、可選地,在根據位姿識別模型和采集到多孔衍射干涉圖像得到所述目標裝備的多自由度位姿變化方面,所述計算模塊具體用于:
8、采用訓練數據集對機器學習模型進行訓練,并將訓練好的機器學習模型確定為位姿識別模型;所述訓練數據集包括:用于訓練的裝備在空間進行多自由度移動時不同時刻的多孔衍射干涉圖像和對應的真實的多自由度位姿變化;
9、將采集到的所述目標裝備當前時刻的多孔衍射干涉圖像輸入所述位姿識別模型,得到所述目標裝備當前時刻的多自由度位姿變化。
10、可選地,所述衍射孔板上的衍射孔隙為不同形狀和不同尺寸的衍射孔或衍射狹縫。
11、可選地,在將采集到的所述目標裝備當前時刻的多孔衍射干涉圖像輸入所述位姿識別模型,得到所述目標裝備當前時刻的多自由度位姿變化方面,所述計算模塊具體用于:
12、將采集到的所述目標裝備當前時刻的多孔衍射干涉圖像輸入所述位姿識別模型,所述位姿識別模型提取當前時刻的多孔衍射干涉圖像的關鍵特征,根據當前時刻的關鍵特征識別當前時刻的多自由度位姿變化;所述關鍵特征包括:條紋分布狀態、條紋數量、條紋形式、條紋間距、條紋所包含的相位、各類條紋變化梯度及各類條紋變化梯度分布信息中的一種或幾種。
13、可選地,所述基于多孔衍射干涉的多維誤差測量裝置還包括:調整裝置;所述測量組件通過所述調整裝置固定在目標裝備的末端;所述調整裝置用于調整所述激光源的軸線與所述測量組件的軸線的相對多維位置。
14、可選地,所述測量組件還包括:圖像采集裝置;所述圖像采集裝置與所述計算模塊連接;所述圖像采集裝置用于采集所述多孔衍射干涉圖像,并將采集到的多孔衍射干涉圖像發送至所述計算模塊。
15、可選地,所述測量組件還包括:光學鏡組;所述激光經過所述光學鏡組后照射到所述衍射孔板上;所述光學鏡組、所述衍射孔板以及所述圖像采集裝置之間的軸向距離處于最佳成像位置;所述最佳成像位置根據多孔衍射干涉圖像的清晰度以及多孔衍射干涉圖像的條紋邊緣對衍射孔板位置變動的靈敏度確定。
16、可選地,所述目標裝備在空間進行六自由度移動;所述六自由度包括:線性度、水平方向直線度、垂直方向直線度、俯仰、扭擺和滾擺。
17、可選地,所述圖像采集裝置為圖像傳感器。
18、第二方面,本申請提供了一種基于多孔衍射干涉的多維誤差測量方法,所述基于多孔衍射干涉的多維誤差測量方法用于上述的基于多孔衍射干涉的多維誤差測量裝置;所述基于多孔衍射干涉的多維誤差測量方法,包括:
19、獲取目標裝備在空間進行多自由度移動過程中的多孔衍射干涉圖像;
20、根據位姿識別模型和采集到多孔衍射干涉圖像得到所述目標裝備的多自由度位姿變化;
21、對所述多自由度位姿變化進行補償,將補償后的多自由度位姿變化確定為所述目標裝備的多維誤差;所述位姿識別模型是基于機器學習模型構建的。
22、根據本申請提供的具體實施例,本申請具有了以下技術效果:
23、本申請提供了一種基于多孔衍射干涉的多維誤差測量裝置及方法,設置包括衍射孔板的測量組件,通過在衍射孔板上設置分布在與光軸正交的平面的水平和垂直方向的多個衍射孔隙,使得衍射孔隙形成的復雜衍射干涉圖像包含衍射孔板在空間多個自由度的位姿,當目標裝備帶動衍射孔板移動時,通過對多孔衍射干涉圖像的識別得到多自由度位姿變化,即得到多維誤差,這樣通過衍射干涉原理進行多維誤差測量,能夠降低成本;計算模塊根據基于機器學習模型構建的位姿識別模型識別多自由度位姿變化,能夠提高測量精度,因此,本申請高精度、低成本地實現了裝備多維誤差的測量。
技術特征:
1.一種基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述基于多孔衍射干涉的多維誤差測量裝置包括:激光源、測量組件和計算模塊;所述測量組件包括:衍射孔板;
2.根據權利要求1所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,在根據位姿識別模型和采集到多孔衍射干涉圖像得到所述目標裝備的多自由度位姿變化方面,所述計算模塊具體用于:
3.根據權利要求1所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述衍射孔板上的衍射孔隙為不同形狀和不同尺寸的衍射孔或衍射狹縫。
4.根據權利要求2所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,在將采集到的所述目標裝備當前時刻的多孔衍射干涉圖像輸入所述位姿識別模型,得到所述目標裝備當前時刻的多自由度位姿變化方面,所述計算模塊具體用于:
5.根據權利要求1所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述基于多孔衍射干涉的多維誤差測量裝置還包括:調整裝置;所述測量組件通過所述調整裝置固定在目標裝備的末端;所述調整裝置用于調整所述激光源的軸線與所述測量組件的軸線的相對多維位置。
6.根據權利要求1所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述測量組件還包括:圖像采集裝置;所述圖像采集裝置與所述計算模塊連接;所述圖像采集裝置用于采集所述多孔衍射干涉圖像,并將采集到的多孔衍射干涉圖像發送至所述計算模塊。
7.根據權利要求6所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述測量組件還包括:光學鏡組;所述激光經過所述光學鏡組后照射到所述衍射孔板上;所述光學鏡組、所述衍射孔板以及所述圖像采集裝置之間的軸向距離處于最佳成像位置;所述最佳成像位置根據多孔衍射干涉圖像的清晰度以及多孔衍射干涉圖像的條紋邊緣對衍射孔板位置變動的靈敏度確定。
8.根據權利要求1所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述目標裝備在空間進行六自由度移動;所述六自由度包括:線性度、水平方向直線度、垂直方向直線度、俯仰、扭擺和滾擺。
9.根據權利要求6所述的基于多孔衍射干涉的多維誤差測量裝置,其特征在于,所述圖像采集裝置為圖像傳感器。
10.一種基于多孔衍射干涉的多維誤差測量方法,其特征在于,所述基于多孔衍射干涉的多維誤差測量方法用于權利要求1-9中任一項所述的基于多孔衍射干涉的多維誤差測量裝置;所述基于多孔衍射干涉的多維誤差測量方法,包括:
技術總結
本申請公開了一種基于多孔衍射干涉的多維誤差測量裝置及方法,涉及裝備測量領域,該基于多孔衍射干涉的多維誤差測量裝置中的測量組件包括衍射孔板;測量組件固定在目標裝備上,且與目標裝備的軸線方向平行;目標裝備在空間進行多自由度移動時帶動測量組件移動;激光源與測量組件處于同一軸線方向;衍射孔板上設置分布在與光軸正交的平面的水平和垂直方向的多個衍射孔隙;激光源發出的激光通過衍射孔板上的多個衍射孔隙后形成多孔衍射干涉圖像;計算模塊根據基于位姿識別模型和采集到多自由度移動過程中的多孔衍射干涉圖像得到多自由度位姿變化,并對其進行補償得到目標裝備的多維誤差,本申請可高精度、低成本地實現裝備多維誤差的測量。
技術研發人員:張之敬,蘇泰玉
受保護的技術使用者:張之敬
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!