基于多源數據分析的大氣污染物檢測方法及系統與流程
本發明涉及大氣污染物監測,尤其涉及一種基于多源數據分析的大氣污染物檢測方法及系統。
背景技術:
1、傳統的大氣污染物監測方法主要依賴于單一數據源,如地面監測站或衛星遙感數據。盡管這些方法能夠在一定程度上提供污染物濃度的基本信息,但由于其固有的局限性,如地面監測站空間覆蓋不足、衛星遙感數據時空分辨率有限等,難以滿足日益復雜的污染監測需求。此外,氣象條件、地形特征等因素的干擾,進一步降低了傳統方法的監測精度和可靠性。隨著大數據、人工智能和物聯網技術的迅猛發展,多源數據融合技術在大氣污染監測領域展現出顯著優勢。該技術通過整合來自地面監測站、衛星遙感、無人機監測、氣象數據以及社交媒體等多源信息,能夠有效彌補單一數據源的不足,提供更加全面、精準和實時的污染物監測結果。多源數據融合技術不僅能夠提升污染物監測的時空覆蓋能力和精度,還能夠通過大數據分析和機器學習算法,深入挖掘污染物來源、擴散規律及其與氣象條件的關聯性,從而為污染治理和預警提供科學依據。
2、在地面監測站單一數據源的大氣污染物監測方法中,首先在城市或工業區選定若干個具有代表性的位置,部署固定式大氣污染監測站。每個監測站配備了多種傳感器,用于實時監測空氣中pm2.5、pm10、so2、no2、co、o3等污染物的濃度。傳感器采集的數據通過有線或無線網絡傳輸至數據中心,數據中心對接收到的原始數據進行預處理,包括去除異常值、填補缺失值和數據標準化等操作。處理后的數據與監測站的地理位置信息整合,生成特定站點的大氣污染物濃度時間序列。接著,數據中心通過插值方法或統計模型,如克里金插值或逆距離加權插值,將離散的站點數據擴展為整個監測區域的污染物空間分布圖。最后,系統定期更新并發布大范圍的大氣污染狀況報告,供相關部門和公眾查詢和參考。
3、由于地面監測站單一數據源的空間覆蓋范圍有限,難以捕捉到監測區域外的污染物變化情況,加之地形復雜、監測站點分布不均、大氣背景干擾和動態環境參數的影響導致的局部地區數據稀疏,使得基于地面監測站的污染物濃度空間分布圖存在較大偏差,限制了其在大范圍精細監測和精準污染溯源中的應用效果。因此現有技術無法避開大氣背景干擾和動態環境參數的影響,在時空特征上對大氣污染物進行快速且精準的監測。
技術實現思路
1、本發明提供了一種基于多源數據分析的大氣污染物檢測方法及系統,以實現結合大氣背景干擾和動態環境參數的影響,在時空特征上對大氣污染物進行快速且精準的監測。
2、第一方面,為了解決上述技術問題,本發明提供了一種基于多源數據分析的大氣污染物檢測方法,包括:
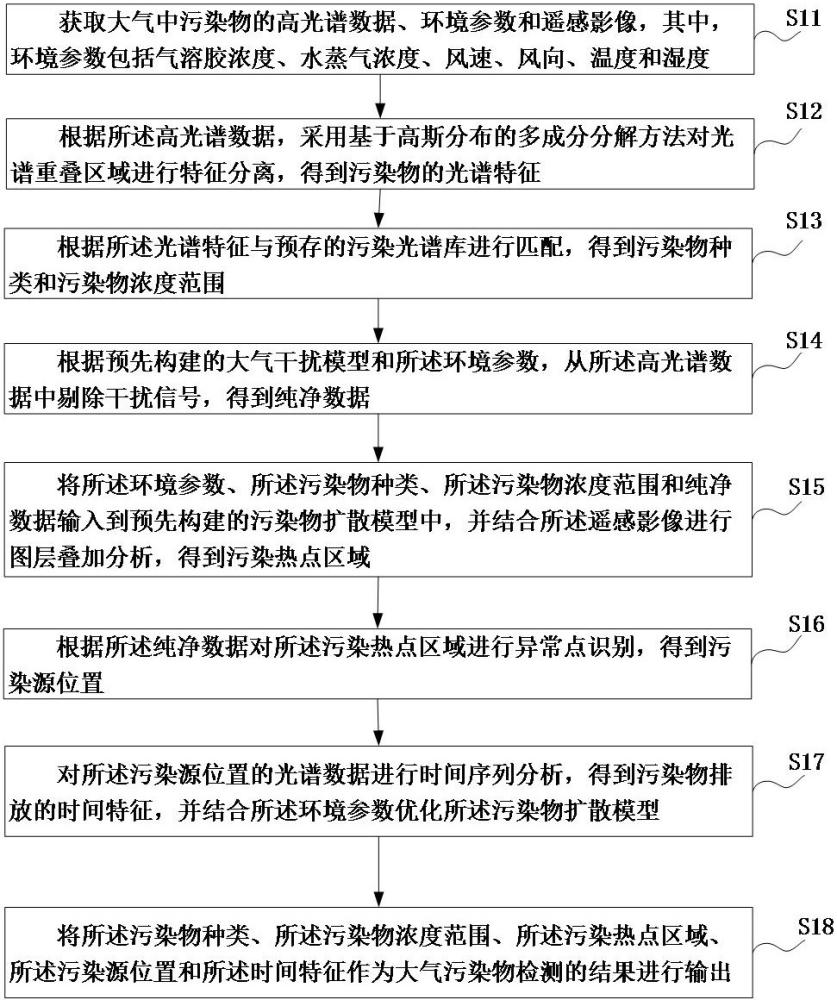
3、獲取大氣中污染物的高光譜數據、環境參數和遙感影像,其中,環境參數包括氣溶膠濃度、水蒸氣濃度、風速、風向、溫度和濕度;
4、根據所述高光譜數據,采用基于高斯分布的多成分分解方法對光譜重疊區域進行特征分離,得到污染物的光譜特征;
5、根據所述光譜特征與預存的污染光譜庫進行匹配,得到污染物種類和污染物濃度范圍;
6、根據預先構建的大氣干擾模型和所述環境參數,從所述高光譜數據中剔除干擾信號,得到純凈數據;
7、將所述環境參數、所述污染物種類、所述污染物濃度范圍和純凈數據輸入到預先構建的污染物擴散模型中,并結合所述遙感影像進行圖層疊加分析,得到污染熱點區域;
8、根據所述純凈數據對所述污染熱點區域進行異常點識別,得到污染源位置;
9、對所述污染源位置的光譜數據進行時間序列分析,得到污染物排放的時間特征,并結合所述環境參數優化所述污染物擴散模型;
10、將所述污染物種類、所述污染物濃度范圍、所述污染熱點區域、所述污染源位置和所述時間特征作為大氣污染物檢測的結果進行輸出。
11、在一種可選的實施方式中,所述根據所述高光譜數據,采用基于高斯分布的多成分分解方法對光譜重疊區域進行特征分離,得到污染物的光譜特征,包括:
12、將所述高光譜數據轉化為高斯函數形式,得到高斯數據;
13、將所述高斯數據進行傅里葉變換,得到分解成不同頻率的頻域數據;
14、將每個所述頻域數據分別進行逆傅里葉變換,得到不同波長的波長域數據;
15、根據所述波長域數據計算分解后的光譜信號與混合信號的均方誤差;
16、根據所述波長域數據和預設的標準數據計算光譜匹配度,并將所述光譜匹配度與預設的光譜匹配閾值進行比較,若所述光譜匹配度小于預設的光譜匹配閾值,則以所述均方誤差最小化為目標,調整高斯函數參數;
17、若所述光譜匹配度大于預設的光譜匹配閾值,則得到污染物的光譜特征;
18、其中,通過以下公式將高光譜數據轉化為高斯函數形式:
19、
20、其中,通過以下公式計算均方誤差:
21、
22、其中,通過以下公式計算光譜匹配度:
23、
24、其中,表示高光譜數據,表示第個高斯函數的幅值,表示第個中心波長,表示高光譜數據的標準差,表示高斯函數組件,表示均方誤差,表示波長為的波長域數據,表示波長域數據數量,表示個污染信號在波長處的波長域數據,表示個污染信號在波長處標準數據,表示光譜匹配度,e為自然常數。
25、在一種可選的實施方式中,所述根據所述光譜特征與預存的污染光譜庫進行匹配,得到污染物種類和污染物濃度范圍,包括:
26、采用小波變換對所述光譜特征進行去噪處理,得到除噪數據;
27、根據所述除噪數據提取特征點和特征線,并與預設的污染光譜庫進行匹配,得到污染物種類;
28、根據所述除噪數據和所述污染光譜庫計算污染濃度,得到污染物濃度范圍;
29、其中,通過以下公式計算特征點和特征線:
30、
31、
32、其中,通過以下公式計算污染物濃度范圍:
33、
34、其中,表示特征點,表示特征線,表示波長,表示除噪數據,和表示吸收峰的起始波長和結束波長,表示污染物濃度范圍,表示污染光譜庫中的波長為的參考數據,表示最大波長,表示預設的摩爾吸光系數,表示光程長度,表示波長為的除噪數據,表示約束條件,取的波長作為特征點。
35、在一種可選的實施方式中,所述根據預先構建的大氣干擾模型和所述環境參數,從所述高光譜數據中剔除干擾信號,得到純凈數據,包括:
36、根據所述氣溶膠濃度計算氣溶膠散射光在大氣層中的干擾量,得到氣溶膠干擾量;
37、根據所述水蒸氣濃度計算水蒸氣吸收光對光譜值的影響量,得到水蒸氣影響量;
38、根據所述氣溶膠干擾量和所述水蒸氣影響量提取高光譜數據中的信號量;
39、通過線性回歸模型對所述信號量進行校正,得到校正數據;
40、通過主成分分析算法提取所述校正數據中的純凈值,得到純凈數據;
41、大氣干擾模型如下所示:
42、
43、
44、
45、
46、
47、
48、其中,表示氣溶膠干擾量,表示水蒸氣影響量,表示氣溶膠濃度,表示波長的散射系數,表示波長,表示無吸收時光譜值,表示水蒸氣吸收系數,表示水蒸氣濃度,表示光程長度,表示高光譜數據,表示信號量,表示校正數據,和表示通過最小二乘法擬合的回歸系數,表示預設的誤差項,表示特征向量矩陣,表示特征值矩陣,表示特征向量矩陣的轉置矩陣,表示前 k個特征向量組成的矩陣,p表示純凈數據。
49、在一種可選的實施方式中,所述將所述環境參數、所述污染物種類、所述污染物濃度范圍和純凈數據輸入到預先構建的污染物擴散模型中,并結合所述遙感影像進行圖層疊加分析,得到污染熱點區域,包括:
50、將所述環境參數、所述污染物種類、所述污染物濃度范圍和純凈數據輸入到預先構建的污染物擴散模型中,得到預測污染數據并生成污染物分布圖;
51、將所述污染物分布圖與所述遙感影像進行圖層疊加分析,得到污染熱點區域;
52、其中,污染物擴散模型如下所示:
53、
54、
55、
56、
57、其中,表示污染物濃度,表示污染種類影響系數,表示風速向量,和表示擴散系數,表示通過遙感影像獲取的污染排放高度,、、和表示預設的經驗系數,、和表示距離污染物的下風方向、橫風方向和垂直方向的距離。
58、在一種可選的實施方式中,所述根據所述純凈數據對所述污染熱點區域進行異常點識別,得到污染源位置,包括:
59、采用k值聚類算法對所述污染熱點區域對應的所述純凈數據進行聚類分析,得到光譜類別并將包含最多純凈數據的所述光譜類別作為背景光譜類別;
60、計算每個所述光譜類別與背景光譜類別的差異度,并將所述差異度與預設的異常閾值進行比較,若所述差異度小于所述異常閾值,則該光譜類別標記為正常點;
61、若所述差異度大于所述異常閾值,則該光譜類別標記為異常點;
62、結合所有所述異常點進行空間分布分析,得到污染源位置;
63、其中,通過以下公式計算差異度:
64、
65、其中,表示差異度,表示光譜類別的光譜特征值,表示背景光譜類別的光譜特征值。
66、在一種可選的實施方式中,所述對所述污染源位置的光譜數據進行時間序列分析,得到污染物排放的時間特征,并結合所述環境參數優化所述污染物擴散模型,包括:
67、對所述污染源位置的光譜數據和預存的歷史光譜數據進行時間序列分析,得到污染物排放的時間特征;
68、根據所述時間特征和所述環境參數,通過梯度下降法對污染物擴散模型的參數進行優化。
69、第二方面,本發明提供了一種基于多源數據分析的大氣污染物檢測系統,包括:
70、數據獲取模塊,用于獲取大氣中污染物的高光譜數據、環境參數和遙感影像,其中,環境參數包括氣溶膠濃度、水蒸氣濃度、風速、風向、溫度和濕度;
71、光譜特征分析模塊,用于根據所述高光譜數據,采用基于高斯分布的多成分分解方法對光譜重疊區域進行特征分離,得到污染物的光譜特征;
72、污染物匹配模塊,用于根據所述光譜特征與預存的污染光譜庫進行匹配,得到污染物種類和污染物濃度范圍;
73、數據優化模塊,用于根據預先構建的大氣干擾模型和所述環境參數,從所述高光譜數據中剔除干擾信號,得到純凈數據;
74、污染區域分析模塊,用于將所述環境參數、所述污染物種類、所述污染物濃度范圍和純凈數據輸入到預先構建的污染物擴散模型中,并結合所述遙感影像進行圖層疊加分析,得到污染熱點區域;
75、污染源分析模塊,用于根據所述純凈數據對所述污染熱點區域進行異常點識別,得到污染源位置;
76、擴散模型優化模塊,用于對所述污染源位置的光譜數據進行時間序列分析,得到污染物排放的時間特征,并結合所述環境參數優化所述污染物擴散模型;
77、輸出模塊,用于將所述污染物種類、所述污染物濃度范圍、所述污染熱點區域、所述污染源位置和所述時間特征作為大氣污染物檢測的結果進行輸出。
78、相比于現有技術,本發明具有如下有益效果:
79、本發明公開了一種基于多源數據分析的大氣污染物檢測方法,包括獲取大氣中污染物的高光譜數據、環境參數和遙感影像,其中,環境參數包括氣溶膠濃度、水蒸氣濃度、風速、風向、溫度和濕度;根據所述高光譜數據,采用基于高斯分布的多成分分解方法對光譜重疊區域進行特征分離,得到污染物的光譜特征;根據所述光譜特征與預存的污染光譜庫進行匹配,得到污染物種類和污染物濃度范圍;根據預先構建的大氣干擾模型和所述環境參數,從所述高光譜數據中剔除干擾信號,得到純凈數據;將所述環境參數、所述污染物種類、所述污染物濃度范圍和純凈數據輸入到預先構建的污染物擴散模型中,并結合所述遙感影像進行圖層疊加分析,得到污染熱點區域;根據所述純凈數據對所述污染熱點區域進行異常點識別,得到污染源位置;對所述污染源位置的光譜數據進行時間序列分析,得到污染物排放的時間特征,并結合所述環境參數優化所述污染物擴散模型;將所述污染物種類、所述污染物濃度范圍、所述污染熱點區域、所述污染源位置和所述時間特征作為大氣污染物檢測的結果進行輸出。本發明通過獲取污染物的高光譜數據、環境參數及遙感影像;基于高斯分布的多成分分解方法對光譜重疊區域進行特征分離,匹配預存污染光譜庫,確定污染物種類及濃度范圍;通過大氣干擾模型剔除高光譜數據中的干擾信號,獲得純凈數據;將環境參數、污染物信息及純凈數據輸入污染物擴散模型,結合遙感影像進行圖層疊加分析,識別污染熱點區域;基于純凈數據對熱點區域進行異常點識別,定位污染源;對污染源光譜數據的時間序列進行分析,結合環境參數優化擴散模型;最終輸出污染物種類、濃度范圍、熱點區域、污染源位置及時間特征,實現大氣污染物快速精準的時空監測。
- 還沒有人留言評論。精彩留言會獲得點贊!