一種LVDT位移傳感器驅(qū)動(dòng)電路自檢方法及電路與流程
本發(fā)明屬于控制電路,特別是一種lvdt位移傳感器驅(qū)動(dòng)電路自檢方法及電路。
背景技術(shù):
1、lvdt位移傳感器在工業(yè)控制、航天航空、電力、石油化工等領(lǐng)域有著廣泛的應(yīng)用,常被用來測(cè)量?jī)x器儀表的位移、尺寸、振動(dòng)、厚度等數(shù)據(jù)參數(shù)。lvdt位移傳感器由鐵心、銜鐵、初級(jí)線圈、次級(jí)線圈組成,這些器件不具備直接使用的條件,所獲取的信號(hào)不能直接使用,需要經(jīng)過驅(qū)動(dòng)電路的處理和轉(zhuǎn)換才能完成測(cè)量,它是一個(gè)非常復(fù)雜的過程,因此驅(qū)動(dòng)電路的重要性不言而喻,它的優(yōu)劣決定了傳感器的質(zhì)量,主要體現(xiàn)兩個(gè)方面在:一、驅(qū)動(dòng)電路對(duì)信號(hào)的處理精度和速度直接影響著傳感器的測(cè)量精度和響應(yīng)能力;二、驅(qū)動(dòng)電路如果受到各種因素影響損壞或者老化,將會(huì)產(chǎn)生非常大的解調(diào)偏差,這將不僅影響測(cè)量結(jié)果,更會(huì)帶來安全隱患。
2、如果在傳感器使用前、使用中以及維護(hù)期間能夠提前發(fā)現(xiàn)驅(qū)動(dòng)電路自身功能是否正常工作將非常有意義,特別在維護(hù)期間,不需要拆機(jī)或者拆殼,就能對(duì)驅(qū)動(dòng)電路進(jìn)行自檢查,不僅可以減少大量的維護(hù)工序和時(shí)間成本,還減少了拆機(jī)對(duì)產(chǎn)品性能的影響,從而大大提高了傳感器的可靠性和安全性。
3、通過查閱大量資料可知,目前國(guó)內(nèi)外尚未有對(duì)lvdt位移傳感器驅(qū)動(dòng)電路的自檢研究,大部分都是針對(duì)于模擬量和離散量電路的研究,而且相關(guān)的自檢方法和電路研究也比較少,它們又往往存在以下幾個(gè)問題:1、電路結(jié)構(gòu)復(fù)雜,需要額外搭建電路去生成基準(zhǔn)源或者測(cè)試信號(hào),往往存在測(cè)試信號(hào)精度低,信號(hào)傳輸不穩(wěn)定等問題;2、無法對(duì)測(cè)試信號(hào)監(jiān)控,無法保證測(cè)試信號(hào)的有效性和準(zhǔn)確性。3、需要對(duì)測(cè)試信號(hào)進(jìn)行預(yù)處理,例如采用電阻分壓或者運(yùn)放調(diào)理才能實(shí)現(xiàn)檢測(cè),而這些電阻和運(yùn)放自身的器件工藝誤差會(huì)干擾原始傳感器信號(hào),給整個(gè)測(cè)量系統(tǒng)帶來額外的誤差,使得最終測(cè)量精度不準(zhǔn),此外還增加了整個(gè)電路的復(fù)雜度;4、一些研究中采用了繼電器或者低速開關(guān)器件作為信號(hào)的切換開關(guān),這會(huì)對(duì)信號(hào)產(chǎn)生較大的損耗和延時(shí),只能自檢一些速率要求非常低的離散量驅(qū)動(dòng)電路,通用和實(shí)時(shí)性不強(qiáng)。因此現(xiàn)有技術(shù)也并不能直接用于lvdt位移傳感器驅(qū)動(dòng)電路的自檢。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于針對(duì)上述現(xiàn)有技術(shù)存在的問題和實(shí)際需求,提供一種lvdt位移傳感器驅(qū)動(dòng)電路自檢方法及電路。
2、實(shí)現(xiàn)本發(fā)明目的的技術(shù)解決方案為:根據(jù)本發(fā)明的第一方面,提供了一種lvdt位移傳感器驅(qū)動(dòng)電路自檢方法,所述方法包括以下步驟:
3、第一步:產(chǎn)生至少三路相同的激勵(lì)信號(hào),分別記為第一路激勵(lì)信號(hào)、第二路激勵(lì)信號(hào)、第三路激勵(lì)信號(hào);
4、第二步:?jiǎn)?dòng)第一路激勵(lì)信號(hào),計(jì)算第一路激勵(lì)信號(hào)的幅值和頻率,并進(jìn)行模數(shù)轉(zhuǎn)換;
5、第三步:判斷第一路激勵(lì)信號(hào)的幅值和頻率是否符合預(yù)設(shè)標(biāo)準(zhǔn),即判斷l(xiāng)vdt位移傳感器驅(qū)動(dòng)電路中激勵(lì)功能是否正常,若符合,執(zhí)行下一步,否則返回執(zhí)行第一步;
6、第四步:斷開所述第一路激勵(lì)信號(hào),啟動(dòng)第二路激勵(lì)信號(hào),在所述第二路激勵(lì)信號(hào)的激勵(lì)下,檢測(cè)lvdt位移傳感器驅(qū)動(dòng)電路的解調(diào)功能是否正常,若正常,執(zhí)行下一步,否則結(jié)束自檢過程;
7、第五步:斷開所述第二路激勵(lì)信號(hào),啟動(dòng)第三路激勵(lì)信號(hào),將所述第三路激勵(lì)信號(hào)傳輸至lvdt位移傳感器,獲取lvdt位移傳感器的反饋信號(hào)。
8、進(jìn)一步地,所述產(chǎn)生至少三路相同的激勵(lì)信號(hào),具體由一路激勵(lì)信號(hào)配合至少三路通道實(shí)現(xiàn),通過切換方式使得一路激勵(lì)信號(hào)進(jìn)入不同的通道,形成三路激勵(lì)信號(hào)。
9、進(jìn)一步地,在第三步中,判斷第一路激勵(lì)信號(hào)的幅值和頻率是否符合預(yù)設(shè)標(biāo)準(zhǔn),具體過程包括:
10、若激勵(lì)信號(hào)的幅值在lvdt位移傳感器正常工作的幅值±5%范圍之內(nèi)、且頻率值在lvdt位移傳感器正常工作的±1%范圍之內(nèi),則判斷l(xiāng)vdt位移傳感器驅(qū)動(dòng)電路的激勵(lì)功能正常;若幅值或頻率任意一個(gè)值超出對(duì)應(yīng)范圍則判斷為lvdt位移傳感器驅(qū)動(dòng)電路的激勵(lì)功能故障。
11、進(jìn)一步地,在第四步中,檢測(cè)lvdt位移傳感器驅(qū)動(dòng)電路的解調(diào)功能是否正常,具體包括:
12、計(jì)算所述第二路激勵(lì)信號(hào)的幅值,并進(jìn)行模數(shù)轉(zhuǎn)換;
13、判斷模數(shù)轉(zhuǎn)換結(jié)果是否符合預(yù)設(shè)標(biāo)準(zhǔn),若符合,表明解調(diào)功能正常,否則表明解調(diào)功能不正常。預(yù)設(shè)標(biāo)準(zhǔn)指的是:解調(diào)得到的激勵(lì)信號(hào)幅值在第一路激勵(lì)信號(hào)的幅值的98%~100%范圍內(nèi),若符合,表明解調(diào)功能正常,否則表明解調(diào)功能不正常。
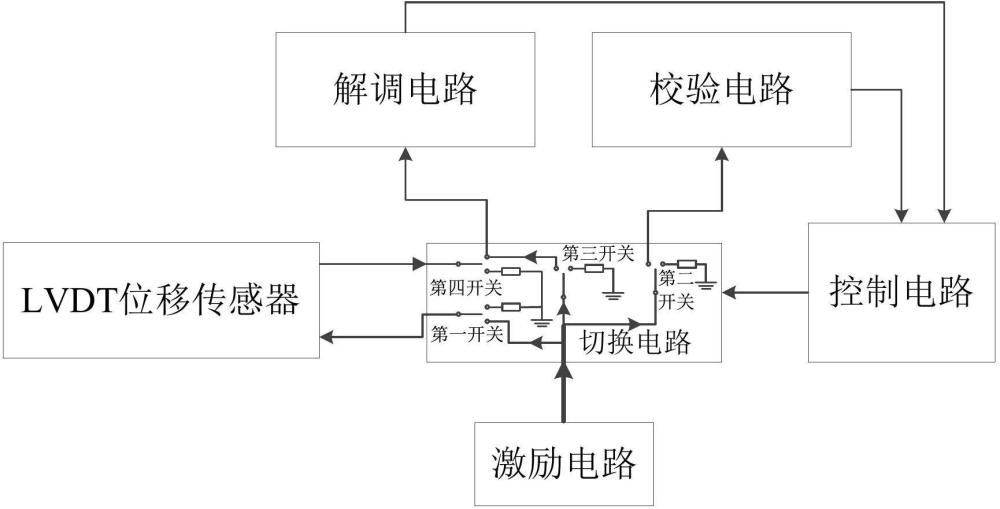
14、根據(jù)本發(fā)明的第二方面,提供了一種?lvdt位移傳感器驅(qū)動(dòng)電路自檢電路,用于實(shí)現(xiàn)上述的一種lvdt位移傳感器驅(qū)動(dòng)電路自檢方法,所述驅(qū)動(dòng)電路自檢電路包括激勵(lì)電路、切換電路、校驗(yàn)電路、解調(diào)電路和控制電路;
15、所述激勵(lì)電路,與所述切換電路相連,用于產(chǎn)生lvdt位移傳感器工作所需的激勵(lì)信號(hào);
16、所述切換電路,包括至少三路通道,三路通道分別用于分配激勵(lì)信號(hào)至lvdt位移傳感器、校驗(yàn)電路、解調(diào)電路;
17、所述校驗(yàn)電路,用于計(jì)算激勵(lì)信號(hào)的幅值和頻率;
18、所述解調(diào)電路,用于計(jì)算lvdt位移傳感器輸出的反饋信號(hào)或激勵(lì)電路輸出的激勵(lì)信號(hào)的幅值;
19、所述控制電路,與所述切換電路相連,用于接收外部檢測(cè)指令信號(hào),控制所述切換電路的各路通道的通斷;并獲取校驗(yàn)電路和解調(diào)電路輸出的信號(hào)并進(jìn)行處理和判斷,形成自檢結(jié)果。
20、進(jìn)一步地,所述切換電路包括四個(gè)模擬開關(guān),分別為第一開關(guān)、第二開關(guān)、第三開關(guān)和第四開關(guān);所述第一開關(guān),用于控制所述激勵(lì)電路輸出的激勵(lì)信號(hào)至lvdt位移傳感器的通和斷,所述第二開關(guān),用于控制所述激勵(lì)電路輸出的激勵(lì)信號(hào)至校驗(yàn)電路的通和斷,所述第三開關(guān),用于控制所述激勵(lì)電路輸出的激勵(lì)信號(hào)至解調(diào)電路的通和斷,所述第四開關(guān)用于控制lvdt位移傳感器至解調(diào)電路的通和斷;
21、當(dāng)所述模擬開關(guān)斷開時(shí),通過電阻和gnd網(wǎng)絡(luò)連接,使輸出端存在固定的狀態(tài)量。gnd是電路中最穩(wěn)定的網(wǎng)絡(luò),能夠屏蔽干擾信號(hào),進(jìn)而提高電路的抗干擾能力。
22、進(jìn)一步地,所述外部檢測(cè)指令信號(hào)包括檢測(cè)激勵(lì)電路指令和檢測(cè)解調(diào)電路指令,接收到所述檢測(cè)激勵(lì)電路指令式時(shí),進(jìn)行激勵(lì)電路自檢,接收到所述檢測(cè)解調(diào)電路指令時(shí),進(jìn)行解調(diào)電路自檢;且所述檢測(cè)激勵(lì)電路指令的優(yōu)先級(jí)大于檢測(cè)解調(diào)電路指令。
23、進(jìn)一步地,接收到所述解調(diào)電路指令時(shí)需判斷是否執(zhí)行,具體判斷方式為:
24、判斷是否已經(jīng)接收到所述檢測(cè)激勵(lì)電路指令,若未接收到,則持續(xù)接收,且不執(zhí)行所述檢測(cè)解調(diào)電路指令,否則執(zhí)行下一步;
25、判斷激勵(lì)電路是否已經(jīng)自檢結(jié)束,若未結(jié)束,則繼續(xù)等待,且不執(zhí)行檢測(cè)解調(diào)電路指令,否則執(zhí)行下一步;
26、根據(jù)激勵(lì)電路檢測(cè)結(jié)果判斷是否執(zhí)行所述檢測(cè)解調(diào)電路指令,若激勵(lì)電路檢測(cè)結(jié)果為工作正常,則執(zhí)行所述檢測(cè)解調(diào)電路指令,否則不執(zhí)行所述解調(diào)電路指令。
27、進(jìn)一步地,所述控制電路,接收到檢測(cè)激勵(lì)電路指令后,控制所述切換電路中的第一開關(guān)、第三開關(guān)、第四開關(guān)斷開,第二開關(guān)連通,此時(shí),激勵(lì)信號(hào)輸入至校驗(yàn)電路,校驗(yàn)電路完成對(duì)激勵(lì)信號(hào)幅值和頻率值的計(jì)算工作,若被測(cè)激勵(lì)信號(hào)的幅值在lvdt位移傳感器正常工作的幅值±5%范圍之內(nèi)、頻率值在lvdt位移傳感器正常工作的±1%范圍之內(nèi),則判斷激勵(lì)電路無故障,任意一個(gè)值超出對(duì)應(yīng)范圍則判斷為激勵(lì)電路故障。
28、進(jìn)一步地,所述控制電路,接收到檢測(cè)解調(diào)電路指令并確認(rèn)執(zhí)行后,控制所述切換電路中的第一開關(guān)、第四開關(guān)斷開,第二開關(guān)和第三開關(guān)連通;此時(shí),激勵(lì)信號(hào)被分別輸入至校驗(yàn)電路和解調(diào)電路,解調(diào)電路和校驗(yàn)電路同時(shí)完成激勵(lì)信號(hào)幅值的計(jì)算工作,記解調(diào)電路計(jì)算的激勵(lì)信號(hào)幅值為a,校驗(yàn)電路計(jì)算的激勵(lì)信號(hào)幅值為b,若b≥a≥0.98×b,則判斷解調(diào)電路工作正常,否則判斷為解調(diào)電路故障。校驗(yàn)電路的精度和可靠性等級(jí)需高于解調(diào)電路,對(duì)解調(diào)電路的輸出精度分析認(rèn)為解調(diào)電路的精度能達(dá)到不小于校驗(yàn)電路98%的精度水平,可以滿足要求。
29、進(jìn)一步地,若所述控制電路判斷結(jié)果為激勵(lì)電路正常工作、解調(diào)電路正常工作,則自檢結(jié)果為lvdt位移傳感器驅(qū)動(dòng)電路工作正常;若控制電路判斷結(jié)果為激勵(lì)電路正常工作、解調(diào)電路故障,則自檢結(jié)果為lvdt位移傳感器驅(qū)動(dòng)電路輸出正常、解調(diào)故障;若控制電路判斷結(jié)果為激勵(lì)電路故障,則直接判定自檢結(jié)果為lvdt位移傳感器驅(qū)動(dòng)電路工作故障。
30、進(jìn)一步地,所述校驗(yàn)電路包括第一幅值計(jì)算電路和頻率計(jì)算電路,分別用于計(jì)算幅值和頻率;其中所述幅值計(jì)算電路采用分立器件搭建的方案,包括半波整流電路和高階低通濾波電路;所述頻率計(jì)算電路同樣采用分立器件搭建;
31、所述解調(diào)電路包括第二幅值計(jì)算電路,采用集成芯片搭建的方案。
32、進(jìn)一步地,所述第一幅值計(jì)算電路和第二幅值計(jì)算電路需滿足非相似性設(shè)計(jì)原則,且校驗(yàn)電路的精度和可靠性等級(jí)需高于解調(diào)電路。
33、本發(fā)明與現(xiàn)有技術(shù)相比,其顯著優(yōu)點(diǎn)為:
34、1)本發(fā)明可以實(shí)現(xiàn)lvdt位移傳感器驅(qū)動(dòng)電路上電自檢、中斷自檢和維護(hù)自檢,具有自檢電路簡(jiǎn)單、自檢功能選擇多、適用范圍廣、可靠性高、穩(wěn)定性好等特點(diǎn)。
35、2)無需額外生成測(cè)試信號(hào)去檢測(cè)待檢電路,而是巧妙的利用驅(qū)動(dòng)電路自身生成的信號(hào)作為測(cè)試信號(hào)去檢測(cè)待檢電路,減少了電路復(fù)雜程度,同時(shí)節(jié)約了成本。
36、3)對(duì)驅(qū)動(dòng)電路輸出的激勵(lì)信號(hào)進(jìn)行了自檢,這樣既能檢測(cè)激勵(lì)信號(hào),又能保證激勵(lì)信號(hào)作為測(cè)試信號(hào)的有效性和準(zhǔn)確性,提高了檢測(cè)精度。
37、4)無須對(duì)測(cè)試信號(hào)進(jìn)行預(yù)處理就能直接檢測(cè),提高檢測(cè)精度(現(xiàn)有技術(shù)通過電阻分壓或者運(yùn)放調(diào)理的形式對(duì)激勵(lì)信號(hào)進(jìn)行處理,這樣很容易引入額外的干擾和誤差,影響檢測(cè)精度)。
38、5)采用低導(dǎo)通電阻、高帶寬、超快開啟速度的模擬開關(guān)進(jìn)行信號(hào)的切換控制,相比使用繼電器等開關(guān)可以有效減少信號(hào)在傳輸過程中的損耗和延時(shí),幾乎接近無損自檢,同時(shí)通過模擬開關(guān)切換的方式自檢,具有控制方式簡(jiǎn)單、控制電路運(yùn)算資源占用少、自檢速度快等特點(diǎn)。此外,開關(guān)不需要接通的時(shí)候,通過電阻和gnd網(wǎng)絡(luò)連接,使輸出端有固定的狀態(tài)量,從而保持電路的穩(wěn)定性。
39、6)各個(gè)電路之間相互獨(dú)立,不會(huì)相互影響,可靈活應(yīng)用,進(jìn)入自檢模式不受制約,自檢模式不僅支持上電自檢,還支持中斷自檢和維護(hù)自檢。
40、7)劃分了指令的優(yōu)先級(jí),并判斷檢測(cè)解調(diào)電路指令是否執(zhí)行,能夠?qū)崿F(xiàn)有效檢測(cè),且不會(huì)浪費(fèi)資源。
41、8)雖然通過三路激勵(lì)信號(hào)實(shí)現(xiàn),但是本質(zhì)上只需一路激勵(lì)信號(hào),使得三路信號(hào)相同且穩(wěn)定,進(jìn)一步提高了自檢的穩(wěn)定性和精度。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!