一種建筑邊坡變形監測裝置及其監測方法與流程
本發明涉及建筑工程,更具體地說,本發明涉及一種建筑邊坡變形監測裝置及其監測方法。
背景技術:
1、建筑基坑邊坡變形失穩是一種常見危害,因此需要使用到變形監測裝置對邊坡的狀態進行監測,以實現及時預警,預防災害的發生。
2、公告號為cn214883932u的中國實用新型專利公開了一種建筑工程基坑邊坡災害實時監測預警系統,以及公開號為cn117006967a的中國發明專利申請公開了一種高落差建筑群邊坡變形監測裝置及使用方法,其中均記載了在坡頂和坡底分別設立激光發射器和激光接收器,通過使用激光來對邊坡的變形進行監測的方法,但上述技術方案在實際使用時,可能會出現由于邊坡變形導致激光發射器的位置發生變化,導致激光發射器所發出的激光無法照射在激光接收器上的情況,因此還需要調節激光發射器的角度,自動化程度較低。
技術實現思路
1、為了克服現有技術的不足,本發明提供了一種建筑邊坡變形監測裝置及其監測方法,具有自動化程度高的優點。
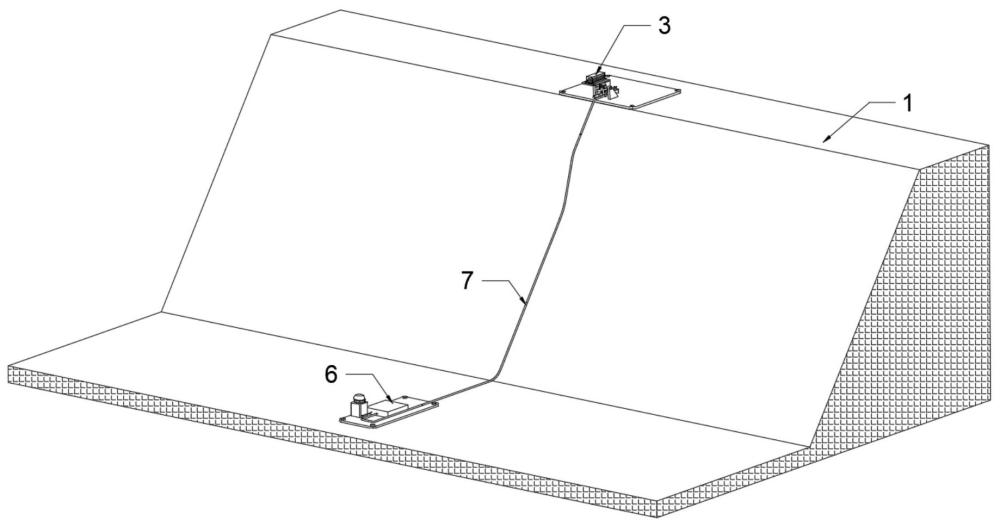
2、為實現上述目的,本發明提供如下技術方案:一種建筑邊坡變形監測裝置,包括邊坡,所述邊坡的頂端固定安裝有激光發生組件,所述邊坡的底端固定安裝有防塵組件,所述激光發生組件上固定安裝有驅動組件;
3、所述激光發生組件包括坡頂安裝架,所述坡頂安裝架的頂端轉動連接有旋轉支撐板,所述旋轉支撐板的底端固定安裝有齒輪,所述旋轉支撐板的頂端固定安裝有激光發射器;
4、所述防塵組件包括激光接收板;
5、所述驅動組件包括三通管一和氣缸,所述三通管一和氣缸均固定安裝在坡頂安裝架的頂端,所述氣缸的輸出端固定套接有主推桿,所述三通管一的頂端活動連接有齒條一,所述齒條一的底端固定安裝有彈簧一,所述主推桿活動連接在三通管一的右端,所述齒條一與齒輪的右側嚙合,所述彈簧一的頂端固定安裝在三通管一內腔的頂端,所述氣缸位于三通管一的右側。
6、作為本發明的一種優選技術方案,所述坡頂安裝架的頂端固定安裝有監測組件,所述監測組件包括三通管二,所述三通管二的頂端活動連接有從動組件,所述三通管二底端的左右兩側均固定安裝有限位環,所述三通管二底端的左右兩側均活動連接有移動片,所述限位環遠離三通管二中心的一端固定安裝有伸縮桿一和彈簧二,所述限位環遠離三通管二中心的一端設有調節組件。
7、作為本發明的一種優選技術方案,所述從動組件包括升降桿和齒條二,所述升降桿的底端活動連接在三通管一的頂端,所述齒條二固定安裝在升降桿的頂端,所述齒條二嚙合在齒輪的左側。
8、作為本發明的一種優選技術方案,所述限位環為圓環形,所述伸縮桿一和彈簧二位于限位環內且均不與限位環接觸,所述彈簧二套設在伸縮桿一上,所述伸縮桿一和彈簧二的另一端均安裝在三通管二上。
9、作為本發明的一種優選技術方案,所述調節組件包括螺柱,所述螺柱嚙合在三通管二上,所述螺柱靠近三通管二中心的一端固定安裝有連接環,所述限位環遠離三通管二中心的一側固定安裝有拉動環,所述連接環活動連接在拉動環內。
10、作為本發明的一種優選技術方案,所述坡頂安裝架的頂端固定安裝有報警組件,所述報警組件包括控制器,所述控制器與坡頂安裝架固定連接且位于三通管二的上方,所述控制器的左右兩端分別電性連接有接線桿一和接線桿二,所述接線桿一固定安裝在三通管二的上且與右側的移動片接觸,所述接線桿二貫穿三通管二的右端且安裝在右側的限位環上,右側所述移動片的材料為銅。
11、作為本發明的一種優選技術方案,所述防塵組件還包括坡底安裝板,所述坡底安裝板固定安裝在邊坡的底端,所述坡底安裝板的頂端固定安裝有防塵盒和信號收發器,所述防塵盒內腔的左側固定安裝有定位桿,所述激光接收板活動連接在定位桿上,所述防塵盒內腔右側的頂端固定安裝有清掃條。
12、作為本發明的一種優選技術方案,所述三通管一的底端固定安裝有推動組件,所述推動組件包括連接管,所述連接管的底端活動連接有移動桿,所述移動桿固定安裝在激光接收板的左側,所述三通管一的底端固定安裝有支撐架,所述支撐架的頂端固定安裝有伸縮桿二和彈簧三,所述伸縮桿二和彈簧三的頂端固定安裝有移動板,所述移動板活動連接在三通管一的底端。
13、作為本發明的一種優選技術方案,所述激光發射器和激光接收板的中心在水平方向上的投影位于同一直線上。
14、一種建筑邊坡變形監測裝置的監測方法,包括如下步驟:
15、首先分別將坡底安裝板和坡頂安裝架安裝在建筑邊坡的坡底和坡頂,并保證激光發射器與激光接收板對齊;
16、在進行監測時,啟動激光發射器和氣缸,激光發射器向左發出激光,氣缸推動主推桿在三通管一的右端向左移動,進而將位于三通管一右端的液壓油推向齒條一和移動板之間,進而使齒條一上移,進而驅動齒輪旋轉,使齒輪通過旋轉支撐板帶動激光發射器的左端向下旋轉,并且在旋轉時,移動板也會下移,進而將移動板下方的液壓油向下推動,進而將移動桿和激光接收板右推,進而使激光接收板向右伸出防塵盒,當激光接收板無法繼續移動時,激光發射器所發出的激光還沒有照射在防塵組件上,此時由于激光接收板無法移動,進入齒條一和移動板之間的液壓油會繼續推動齒條一上移,進而帶動激光發射器繼續下移,直至激光發射器發出的激光照射在激光接收板上,此時激光接收板接受到激光,進而實現測量兩者之間的間距;
17、在齒輪旋轉時,會帶動從動組件向下移動,進而使三通管二頂端的絕緣油向下擠壓,由于左側的彈簧二彈性力小于右側的彈簧二,因此進入三通管二底端的絕緣油會首先將左側的移動片向左推動,當左側的移動片與限位環接觸后,移動片無法移動,此時絕緣油會推動右側的移動片右移,進而使右側的移動片與接線桿一分離,此時控制器接受到接線桿一的斷路信號,隨著激光發射器的擺動角度增加,從動組件會繼續下移,當絕緣油將右側的移動片推動至與限位環接觸時,移動片連通接線桿二,此時控制器接受到接線桿二的通路信號;
18、如果邊坡未發生變形,那么右側的移動片會被推動至斷開接線桿一但不連通接線桿二的狀態,如果接線桿一并沒有發生斷路,則表明激光發射器在沒有到達標準旋轉角度的狀態下已經照射在激光接收板上,進而表明邊坡發生滑坡變形,如果接線桿一斷路但同時連通接線桿二,則表明激光發射器在達到標準旋轉角度的狀態后仍未照射在激光接收板上,表明支撐結構變化導致對邊坡產生向上的頂升力導致邊坡發生變形;
19、同時,在監測前,可以通過旋轉螺柱,來帶動拉動環移動,改變限位環與移動片之間的間距值,進而改變從動組件下移時,推動絕緣油移動量可以更快或更慢的與推動移動片移動,進而調整監測的敏感度;
20、在檢測完畢后,氣缸帶動主推桿復位,進而將移動板和齒條一之間的液壓油抽入三通管一的右端,使齒條一下移、移動板上移,進而帶動齒輪反轉,使激光發射器復位,進而帶動從動組件復位,同時移動板的上移,可以將激光接收板拉回防塵盒內。
21、與現有技術相比,本發明的有益效果如下:
22、1、本發明通過將激光發射器使用旋轉支撐板和坡頂安裝架進行轉動連接,在需要監測時,只需要啟動氣缸,即可推動主推桿在三通管一的右端左移,將三通管一右端的液壓油向左推動至齒條一和移動板之間,進而可以帶動齒條一上移,通過與齒輪的嚙合,可以帶動激光發射器的發射端向下旋轉,通過使用將激光發射器的發射端向下旋轉的方式,使激光照射在激光接收板,可以實現在監測過程中,自動調整激光的發射角度,自動化程度高。
23、2、本發明通過在齒輪旋轉時帶動從動組件的下降使三通管二內的絕緣油下移先推動左側的移動片移動,在推動右側的移動片移動,通過移動片移動后與接線桿一和接線桿二的位置狀態,可以實現判斷激光發射器的旋轉角度是否與預設一致,并且通過在三通管二的左右兩側嚙合螺柱,通過旋轉螺柱可以通過拉動環帶動限位環移動,進而改動限位環與移動片之間的間距,以實現調節監測的靈敏度。
24、3、本發明通過在主推桿移動后,移動板會向下移動,進而通過移動桿將激光接收板推出防塵盒,進而使激光接收板伸出,可以實現在不進行監測時,將激光接收板收入防塵盒內,進而避免施工過程中的灰塵落在激光接收板上阻礙接受激光的情況,并且在檢測完畢后,主推桿在復位時,可以將移動板上拉,進而將激光接收板左拉,通過在激光接收板上設置的清掃條,可以對激光接收板的表面灰塵進行清掃,以保證激光接收板的清潔。
- 還沒有人留言評論。精彩留言會獲得點贊!