一種風洞尾撐變角度機構控制精度修正方法與流程
本發明涉及風洞試驗控制領域,具體地,涉及一種風洞尾撐變角度機構控制精度修正方法。
背景技術:
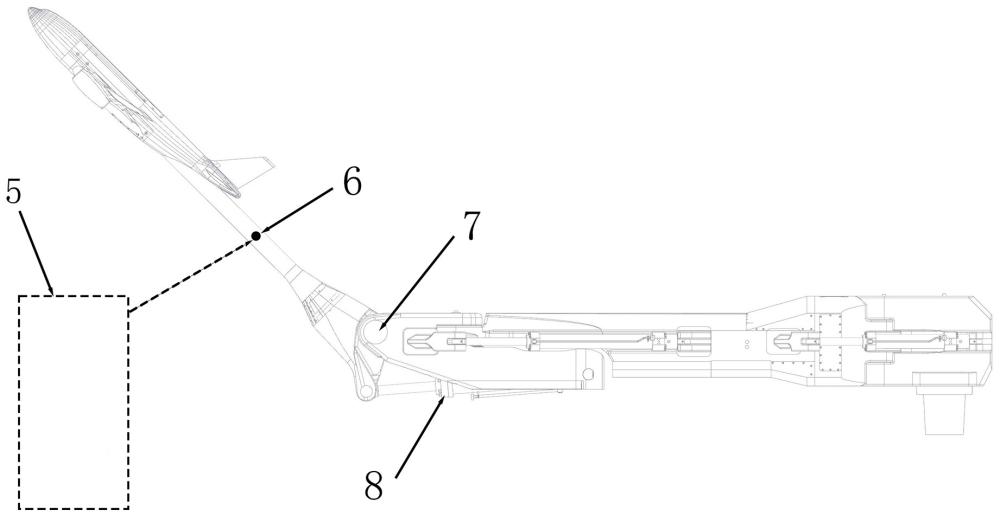
1、風洞尾撐變角度機構是低速風洞中常用的模型角度支持機構,通過尾撐變角度機構實現模型的俯仰角和側滑角的變化。風洞尾撐變角度機構通常由俯仰機構、前側滑機構、后側滑機構以及y向機構組成。其中俯仰機構主要完成試驗模型的俯仰角度調節,前側滑角和后側滑角組合完成試驗模型側滑角度調節,y向機構主要在模型進行俯仰角度調節過程中,在垂直風洞流場方向對機構位置進行調節,使得試驗模型的旋轉中心始終位于風洞軸線。風洞尾撐變角度機構外形如圖1所示。
2、風洞尾撐變角度機構通常通過液壓油缸驅動各個機構繞轉軸旋轉,實現機構的角度調節功能。在機構設計過程中,各個機構角度與油缸長度具有固定的對應關系,可通過機構的運動關系,以機構單側油缸長度為控制對象,實現機構角度的精確控制。但在實際的機構加工和裝配過程中,由于機械加工和裝配均存在誤差,導致依靠設計參數進行機構角度控制與實際的機構角度運行存在一定的誤差。
3、通常尾撐變角度機構的控制精度通過高精度的加工和裝配誤差保證機構的控制誤差,但往往加工和裝配誤差很難保證,并且在機構維修或重新裝配過程中,裝配誤差很難保證重復性,這就造成重復裝配后機構控制誤差的不確定性,甚至導致機構的角度控制誤差超出設計指標要求。
技術實現思路
1、本發明目的是提高風洞尾撐變角度機構的控制精度。
2、為實現上述目的,本發明提供了一種風洞尾撐變角度機構控制精度修正方法,所述風洞尾撐變角度機構由控制系統驅動,所述風洞尾撐變角度機構包括若干變角度機構,所述方法包括:
3、步驟1:完成風洞尾撐變角度機構裝配后,將風洞尾撐變角度機構中的所有變角度機構的各個角度均調整至機械0°位置,進入步驟2;
4、步驟2:控制系統根據變角度機構的運行范圍,將變角度機構的運行范圍劃分為若干個有序的角度變化階梯,獲得角度序列,進入步驟3;
5、步驟3:在變角度機構的機械0°位置,控制系統將該位置標識為標識點和控制系統的系統0°,獲取在變角度機構處于機械0°位置時標識點的空間位置信息,進入步驟4;
6、步驟4:控制系統根據變角度機構的設計尺寸數據,驅動變角度機構繞機構旋轉中心旋轉,按照變角度機構的角度類型和變角度機構驅動機構位置的對應關系,控制變角度機構從0°正向運行至角度序列中的第一個角度變化階梯,待控制系統控制變角度機構運行第一個角度變化階梯后,進入步驟5;
7、步驟5:獲取變角度機構處于第一個角度變化階梯時標識點的空間位置信息,進入步驟6;
8、步驟6:控制系統控制變角度機構的驅動機構運行至角度序列中的第二個角度變化階梯對應的驅動機構位置,進入步驟7;
9、步驟7:獲取變角度機構處于角度序列中的第二個角度變化階梯時標識點的空間位置信息,進入步驟8;
10、步驟8:控制系統判斷當前變角度機構的角度是否為最大角度或最小角度;若是,則進入步驟9;若不是,則進入步驟10;
11、步驟9:控制系統驅動變角度機構反向運行至角度序列中的相對于步驟7中角度變化階梯的下一個角度變化階梯,進入步驟7并將步驟7中變角度機構的角度變化階梯更新為當前的角度變化階梯;
12、步驟10:控制系統控制變角度機構驅動機構運行至角度序列中相對于步驟7中角度變化階梯的下一個角度變化階梯對應的驅動機構位置,進入步驟11;
13、步驟11:判斷是否已獲得符合預設要求數量的對應角度變化階梯的標識點的空間位置信息,若已獲得,進入步驟12,若未獲得,進入步驟7并將步驟7中變角度機構的角度變化階梯更新為當前的角度變化階梯;
14、步驟12:將獲取的標識點的所有空間位置信息與控制系統給定角度進行對應,獲得變角度機構各個角度變化階梯對應的控制誤差,進入步驟13;
15、步驟13:將獲得的變角度機構各個角度變化階梯對應的控制誤差取平均值,獲得每個角度變化階梯對應的平均控制誤差,進入步驟14;
16、步驟14:判斷平均控制誤差是否滿足變角度機構的控制誤差要求,若滿足,進入步驟17,若不滿足,進入步驟15;
17、步驟15:以變角度機構各個角度變化階梯為橫坐標,以變角度機構各個角度變化階梯對應的平均控制誤差為縱坐標,對平均控制誤差進行多次多項式擬合,獲得變角度機構運行范圍的角度控制誤差修正公式,進入步驟16;
18、步驟16:在控制系統中,通過獲得的角度控制誤差修正公式對變角度機構的角度控制進行修正,進入步驟2;
19、步驟17:采用當前控制參數實現變角度機構的角度控制,完成參數優化。
20、進一步的,所述風洞尾撐變角度機構中的變角度機構包括:俯仰機構、前側滑機構和后側滑機構。
21、進一步的,將變角度機構的運行范圍均勻劃分為若干個有序的角度變化階梯。
22、進一步的,所述方法使用激光跟蹤儀獲取標識點的空間位置信息。
23、進一步的,所述風洞尾撐變角度機構中的變角度機構通過電動推桿或液壓油缸驅動。
24、本發明提供的一個或多個技術方案,至少具有如下技術效果或優點:
25、本發明提出的一種風洞尾撐變角度機構控制精度修正方法,是在風洞尾撐變角度機構完成裝配后,在變角度機構的運行調試過程中,通過引入高精度的激光跟蹤儀,對變角度機構設置的標識點進行空間位置變化測量,得到機構運行全范圍的實際角度變化量,與控制系統給定的角度進行對比并得到變角度機構實際運行角度與控制系統給定角度的誤差,通過對誤差進行非線性擬合,獲得變角度機構運行全范圍的控制系統修正量,進而提高風洞尾撐變角度機構的控制精度。
技術特征:
1.一種風洞尾撐變角度機構控制精度修正方法,其特征在于,所述風洞尾撐變角度機構由控制系統驅動,所述風洞尾撐變角度機構包括若干變角度機構,所述方法包括:
2.根據權利要求1所述的一種風洞尾撐變角度機構控制精度修正方法,其特征在于,所述風洞尾撐變角度機構中的變角度機構包括:俯仰機構、前側滑機構和后側滑機構。
3.根據權利要求1所述的一種風洞尾撐變角度機構控制精度修正方法,其特征在于,將變角度機構的運行范圍均勻劃分為若干個有序的角度變化階梯。
4.根據權利要求1所述的一種風洞尾撐變角度機構控制精度修正方法,其特征在于,所述方法使用激光跟蹤儀獲取標識點的空間位置信息。
5.根據權利要求1所述的一種風洞尾撐變角度機構控制精度修正方法,其特征在于,所述風洞尾撐變角度機構中的變角度機構通過電動推桿或液壓油缸驅動。
技術總結
本發明公開了一種風洞尾撐變角度機構控制精度修正方法,涉及風洞試驗控制領域,所述風洞尾撐變角度機構由控制系統驅動,所述風洞尾撐變角度機構包括若干變角度機構,所述方法在風洞尾撐變角度機構完成裝配后,在變角度機構的運行調試過程中,通過引入高精度的激光跟蹤儀,對變角度機構設置的標識點進行空間位置變化測量,得到機構運行全范圍的實際角度變化量,與控制系統給定的角度進行對比并得到變角度機構實際運行角度與控制系統給定角度的誤差,通過對誤差進行非線性擬合,獲得變角度機構運行范圍的控制系統修正量,進而提高風洞尾撐變角度機構的控制精度。
技術研發人員:謝明偉,褚衛華,周鑫,李樹成,黎壯聲,蔡清青
受保護的技術使用者:中國空氣動力研究與發展中心設備設計與測試技術研究所
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!