無人車離線任務下發方法、裝置、電子設備及存儲介質與流程
本發明實施例涉及人工智能,尤其涉及一種無人車離線任務下發方法、裝置、電子設備及存儲介質。
背景技術:
1、隨著自動駕駛技術的迅速發展,應用自動駕駛技術進行自動駕駛的無人車得以迅速的發展與推廣。
2、在當前無人車任務執行系統中,任務的創建與控制高度依賴于服務端。一旦服務端不可用,系統將無法向無人車下發任務,導致所有無人車無法正常運行。因此,現有系統在服務端出現故障的情況下,缺乏有效的任務下發和控制手段,影響了無人車的穩定運營。
3、因此,如何在服務端不可用時對無人車進行有效的任務下發及控制是本領域技術人員亟待解決的技術問題。
技術實現思路
1、本發明實施例提供一種無人車離線任務下發方法、裝置、電子設備及存儲介質,以實現在無人車服務端出現異常時,駕駛員仍然能夠通過移動設備直接與無人車建立通信并進行離線任務的下發,從而維持無人車的正常運行。
2、第一方面,本發明實施例提供了一種無人車離線任務下發方法,包括:
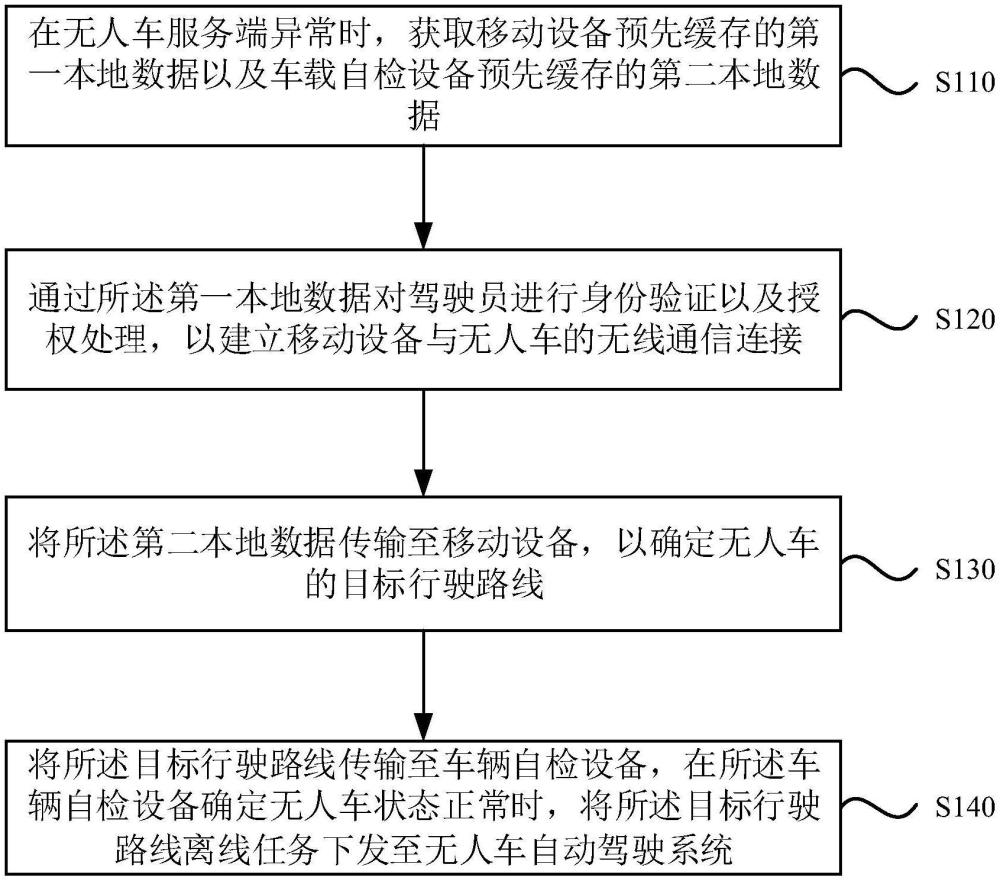
3、在無人車服務端異常時,獲取移動設備預先緩存的第一本地數據以及車載自檢設備預先緩存的第二本地數據;
4、通過所述第一本地數據對駕駛員進行身份驗證以及授權處理,以建立移動設備與無人車的無線通信連接;
5、將所述第二本地數據傳輸至移動設備,以確定無人車的目標行駛路線;
6、將所述目標行駛路線傳輸至車載自檢設備,在所述車載自檢設備確定無人車狀態正常時,將所述目標行駛路線離線任務下發至無人車自動駕駛系統。
7、第二方面,本發明實施例還提供了一種無人車離線任務下發裝置,包括:
8、本地數據獲取模塊,用于在無人車服務端異常時,獲取移動設備預先緩存的第一本地數據以及車載自檢設備預先緩存的第二本地數據;
9、無線通信連接模塊,用于通過所述第一本地數據對駕駛員進行身份驗證以及授權處理,以建立移動設備與無人車的無線通信連接;
10、目標行駛路線確定模塊,也將所述第二本地數據傳輸至移動設備,以確定無人車的目標行駛路線;
11、離線任務下發模塊,用于將所述目標行駛路線傳輸至車載自檢設備,在所述車載自檢設備確定無人車狀態正常時,將所述目標行駛路線離線任務下發至無人車自動駕駛系統。
12、第三方面,本發明實施例還提供了一種電子設備,該電子設備包括:
13、一個或多個處理器;
14、存儲裝置,用于存儲一個或多個程序;
15、當所述一個或多個程序被所述一個或多個處理器執行,使得所述一個或多個處理器實現本發明任意實施例所述的無人車離線任務下發方法。
16、第四方面,本發明實施例還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現本發明任意實施例所述的無人車離線任務下發方法。
17、第五方面,本發明實施例還提供了一種計算機程序產品,包括計算機程序,所述計算機程序在被處理器執行時實現如本發明任意實施例所述的無人車離線任務下發方法。
18、本發明實施例提供了一種無人車離線任務下發方法、裝置、電子設備和存儲介質,通過在無人車服務端異常時,獲取移動設備預先緩存的無人車車輛權限數據以及駕駛員身份信息,車載自檢設備預先緩存的無人車所屬區域內的線路信息;通過所述無人車車輛權限數據以及駕駛員身份信息對駕駛員進行身份驗證以及授權處理,以建立移動設備與無人車的無線通信連接;將無人車所屬區域內的線路信息傳輸至移動設備,以確定無人車的目標行駛路線;將所述目標行駛路線傳輸至車載自檢設備,在所述車載自檢設備確定無人車狀態正常時,將所述目標行駛路線離線任務下發至無人車自動駕駛系統。采用本發明實施例的技術方案,在無人車服務端出現異常時,駕駛員仍然能夠通過移動設備直接與無人車建立通信并進行離線任務的下發,從而維持無人車的正常運行。
技術特征:
1.一種無人車離線任務下發方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述第一本地數據包括無人車車輛權限數據以及駕駛員身份信息;所述第二本地數據包括無人車所屬區域內的線路信息。
3.根據權利要求1所述的方法,其特征在于,所述通過所述第一本地數據對駕駛員進行身份驗證以及授權處理,以建立移動設備與無人車的無線通信連接,包括:
4.根據權利要求1所述的方法,其特征在于,所述將所述第二本地數據傳輸至移動設備,以確定無人車的目標行駛路線,包括:
5.根據權利要求1所述的方法,其特征在于,所述方法還包括:
6.根據權利要求1所述的方法,其特征在于,所述方法還包括:
7.一種無人車離線任務下發裝置,其特征在于,所述裝置包括:
8.一種電子設備,其特征在于,包括:
9.一種包含計算機可執行指令的存儲介質,其特征在于,所述計算機可執行指令在由計算機處理器執行時用于執行如權利要求1-6中任一所述的無人車離線任務下發方法。
10.一種計算機程序產品,包括計算機程序,所述計算機程序在被處理器執行時實現根據權利要求1-6中任一項所述的無人車離線任務下發方法。
技術總結
本發明實施例公開了一種無人車離線任務下發方法、裝置、電子設備及存儲介質。該方法包括:在無人車服務端異常時,獲取移動設備預先緩存的第一本地數據以及車載自檢設備預先緩存的第二本地數據;通過所述第一本地數據對駕駛員進行身份驗證以及授權處理,以建立移動設備與無人車的無線通信連接;將所述第二本地數據傳輸至移動設備,以確定無人車的目標行駛路線;將所述目標行駛路線傳輸至車載自檢設備,在所述車載自檢設備確定無人車狀態正常時,將所述目標行駛路線離線任務下發至無人車自動駕駛系統。采用本方案,在無人車服務端出現異常時,駕駛員仍然能夠通過移動設備直接與無人車建立通信并進行離線任務的下發,從而維持無人車的正常運行。
技術研發人員:李博文,頡晶華,楊濤
受保護的技術使用者:新石器慧通(北京)科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!