一種用于特高拱壩壩面的無人機自動巡檢系統的制作方法
本申請涉及水電站大壩無人巡檢,尤其涉及一種用于特高拱壩壩面的無人機自動巡檢系統。
背景技術:
1、大壩作為大型水電工程最重要基礎設施之一,常年承載大方量高水位壓力,在長期服役過程中,由于水位、溫度、時效、徐變等因素變化,拱壩混凝土會不同程度的產生裂縫、剝蝕、滲流等缺陷,對拱壩安全運行造成影響。因此,定期對拱壩壩面混凝土進行巡檢,結合相關監測成果綜合分析,對掌握拱壩運行狀態、確保拱壩安全運行至關重要。由于特高拱壩高差大,傳統人工與設備難以到達,同時采用傳統高空懸垂作業的方式開展壩面檢查,周期長、效率低、準確性差、費用高、距離壩面遠、安全風險大,亟需探索大型水電工程大壩壩面巡檢新技術。
技術實現思路
1、本申請提供一種用于特高拱壩壩面的無人機自動巡檢系統,以至少解決周期長、效率低、準確性差、費用高、距離壩面遠、安全風險大的技術問題。
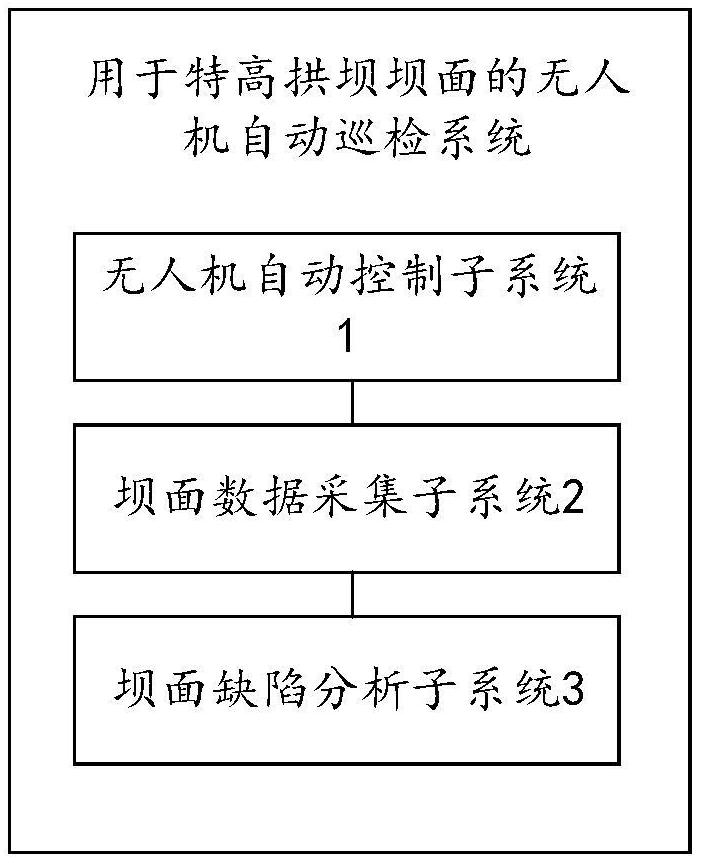
2、本申請實施例提出一種用于特高拱壩壩面的無人機自動巡檢系統,所述系統包括:無人機自動控制子系統、壩面數據采集子系統、壩面缺陷分析子系統;
3、所述無人機自動控制子系統,用于制定各無人機飛行航線,并控制各無人機的起飛和降落;
4、所述壩面數據采集子系統,用于采集特高拱壩壩面的數據信息,并將所述特高拱壩壩面的數據信息發送到所述壩面缺陷分析子系統;
5、所述壩面缺陷分析子系統,用于根據所述特高拱壩壩面的數據信息確定所述特高拱壩壩面的缺陷信息。
6、優選的,所述無人機自動控制子系統包括:移動式無人機停機坪、環境監測傳感器、gnss地面基準站;
7、所述移動式無人機停機坪,用于為各無人機起飛和降落提供平臺;
8、其中,所述移動式無人機停機坪包括停機坪自動伸縮導軌,所述停機坪自動伸縮導軌,用于在各無人機起飛前將移動式無人機停機坪推送至指定預飛區域,各無人機飛行任務結束后,將移動式無人機停機坪推回停機庫;
9、所述環境監測傳感器,用于實時采集無人機飛行區域內的降水量、風速;
10、所述gnss地面基準站,用于為各無人機提供實時定位數據;
11、其中,所述環境監測傳感器包括:風速傳感器、雨量傳感器。
12、進一步的,所述無人機自動控制子系統還包括:多傳感器集成控制模塊;
13、所述多傳感器集成控制模塊,用于控制所述停機坪自動伸縮導軌、所述環境監測傳感器的開啟及關閉。
14、進一步的,所述無人機自動控制子系統還包括:無人機監測控制模塊;
15、所述無人機監測控制模塊,用于控制無人機的起飛、飛行和返航;
16、所述無人機監測控制模塊包括:起飛環境判斷模塊、無人機自檢模塊、無人機航線選擇模塊、起飛控制模塊、返航控制模塊;
17、所述起飛環境判斷模塊,用于基于所述風速傳感器及所述雨量傳感器采集的降水量、風速判斷是否滿足起飛條件;
18、所述無人機自檢模塊,用于在起飛前對各無人機的電量、gnss信號是否正常進行判斷;
19、所述無人機航線選擇模塊,用于規劃無人機飛行的路徑,生成飛行航線;
20、所述起飛控制模塊,用于在滿足飛行條件時將無人機飛行航線對應的航線任務坐標、數據采集參數傳輸至對應無人機,并控制無人機起飛;
21、所述返航控制模塊,用于在無人機完成飛行航線任務或出現特殊情況時控制所述無人機返航;
22、其中,所述特殊情況包括:環境突變、gnss信號臨時丟失。
23、進一步的,所述壩面數據采集子系統包括:無人機群、航攝相機、激光雷達、gnss接收機、慣性測量傳感器、數據自動采集模塊;
24、所述無人機群由各無人機構成,所述航攝相機、激光雷達、gnss接收機、慣性測量傳感器、數據自動采集模塊均設置在所述無人機上;
25、所述航攝相機,用于采集所述壩面的影像數據;
26、所述激光雷達,用于采集所述壩面的脈沖數據;
27、所述gnss接收機,用于采集無人機的位置信息;
28、所述慣性測量傳感器,用于采集無人機的姿態信息;
29、所述數據自動采集模塊,用于接收所述影像數據、脈沖數據、位置信息和姿態信息;
30、所述數據信息包括:影像數據、脈沖數據、位置信息和姿態信息。
31、進一步的,所述壩面數據采集子系統還包括:電源設備;
32、所述電源設備,用于向所述航攝相機、激光雷達、gnss接收機、慣性測量傳感器、數據自動采集模塊提供電能。
33、進一步的,所述壩面數據采集子系統還包括:存儲器和通信模塊,所述存儲器的一端與所述航攝相機連接,另一端與所述通信模塊連接,所述通信模塊與所述數據自動采集模塊連接;
34、所述存儲器,用于存儲脈沖數據、影像數據。
35、所述通信模塊,用于將所述影像數據發送到所述數據自動采集模塊。
36、進一步的,所述壩面缺陷分析子系統包括:數據預處理模塊、缺陷分析模塊;
37、所述數據預處理模塊,用于對所述數據信息進行預處理,得到預處理后的數據信息;
38、所述缺陷分析模塊,用于基于所述預處理后的數據信息確定所述特高拱壩壩面的缺陷信息;
39、所述缺陷信息包括:缺陷類型、缺陷參數。
40、進一步的,所述缺陷分析模塊中設置有預先訓練好的缺陷分析模型;
41、所述缺陷分析模型是以預處理后的特高拱壩壩面的數據信息為輸入,以所述特高拱壩壩面的數據信息對應的缺陷信息為輸出,對初始的卷積神經網絡進行訓練得到的。
42、進一步的,所述壩面缺陷分析子系統還包括:數據存儲模塊;
43、所述數據存儲模塊,用于存儲影像數據、脈沖數據、位置信息、姿態信息、缺陷信息和缺陷分析模型。
44、本申請的實施例提供的技術方案至少帶來以下有益效果:
45、本申請提出了一種用于特高拱壩壩面的無人機自動巡檢系統,所述系統包括:無人機自動控制子系統、壩面數據采集子系統、壩面缺陷分析子系統;所述無人機自動控制子系統,用于制定各無人機飛行航線,并控制各無人機的起飛和降落;所述壩面數據采集子系統,用于采集特高拱壩壩面的數據信息,并將所述特高拱壩壩面的數據信息發送到所述壩面缺陷分析子系統;所述壩面缺陷分析子系統,用于根據所述特高拱壩壩面的數據信息確定所述特高拱壩壩面的缺陷信息。本申請提出的技術方案,可以高效精確的對特高拱壩壩面的缺陷進行判斷分析。
46、本申請附加的方面以及優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本申請的實踐了解到。
技術特征:
1.一種用于特高拱壩壩面的無人機自動巡檢系統,其特征在于,所述系統包括:無人機自動控制子系統、壩面數據采集子系統、壩面缺陷分析子系統;
2.如權利要求1所述的系統,其特征在于,所述無人機自動控制子系統包括:移動式無人機停機坪、環境監測傳感器、gnss地面基準站;
3.如權利要求2所述的系統,其特征在于,所述無人機自動控制子系統還包括:多傳感器集成控制模塊;
4.如權利要求3所述的系統,其特征在于,所述無人機自動控制子系統還包括:無人機監測控制模塊;
5.如權利要求4所述的系統,其特征在于,所述壩面數據采集子系統包括:無人機群、航攝相機、激光雷達、gnss接收機、慣性測量傳感器、數據自動采集模塊;
6.如權利要求5所述的系統,其特征在于,所述壩面數據采集子系統還包括:電源設備;
7.如權利要求6所述的系統,其特征在于,所述壩面數據采集子系統還包括:存儲器和通信模塊,所述存儲器的一端與所述航攝相機連接,另一端與所述通信模塊連接,所述通信模塊與所述數據自動采集模塊連接;
8.如權利要求7所述的系統,其特征在于,所述壩面缺陷分析子系統包括:數據預處理模塊、缺陷分析模塊;
9.如權利要求8所述的系統,其特征在于,所述缺陷分析模塊中設置有預先訓練好的缺陷分析模型;
10.如權利要求8所述的系統,其特征在于,所述壩面缺陷分析子系統還包括:數據存儲模塊;
技術總結
本申請提出一種用于特高拱壩壩面的無人機自動巡檢系統,所述系統包括:無人機自動控制子系統、壩面數據采集子系統、壩面缺陷分析子系統;所述無人機自動控制子系統,用于制定各無人機飛行航線,并控制各無人機的起飛和降落;所述壩面數據采集子系統,用于采集特高拱壩壩面的數據信息,并將所述特高拱壩壩面的數據信息發送到所述壩面缺陷分析子系統;所述壩面缺陷分析子系統,用于根據所述特高拱壩壩面的數據信息確定所述特高拱壩壩面的缺陷信息。本申請提出的技術方案,可以高效精確的對特高拱壩壩面的缺陷進行判斷分析。
技術研發人員:吳智明,廖貴能,趙培雙,李洪波,楊福平,查海華,馬江霞,王海燕,羅國立,翟笠,劉軍顯,劉焌楠,王爽,孫亞民,石天朗
受保護的技術使用者:華能瀾滄江水電股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!