一種用于水陸航行器的分布式水下環境適變感知方法與流程
本發明涉及水下環境感知,尤其涉及一種用于水陸航行器的分布式水下環境適變感知方法。
背景技術:
1、隨著海洋資源開發和水下工程作業的不斷深入,對水下環境的感知和障礙物識別技術提出了更高的要求。水下環境感知技術是確保水下作業安全和提高作業效率的關鍵技術之一。然而,現有技術中水下環境感知和障礙物識別在不同濁度條件下適應性差、單一傳感器感知能力有限、數據融合效果不佳等問題仍然突出。
2、目前,水下環境感知主要依賴于聲納、視覺傳感器等單一類型的傳感器,這些傳感器在特定條件下能夠提供有效的感知信息,但在復雜的水下環境中,單一傳感器的感知能力受限,難以滿足對障礙物全方位識別的需求。此外,水下環境的濁度變化對傳感器的性能影響較大,現有技術缺乏對不同濁度條件下傳感器性能的適應性調整。
3、首先,單一傳感器難以應對多變的水下環境,特別是在濁度較高時,視覺傳感器的性能會大幅下降;其次,現有技術缺乏有效的數據融合算法,無法充分利用多種傳感器的互補信息,導致障礙物識別的準確性和魯棒性不足;最后,現有系統難以根據實時的水下環境變化動態調整傳感器的工作狀態,以適應不同的作業條件。這些問題限制了水下作業裝備的性能和應用范圍,增加了水下作業的風險。
技術實現思路
1、鑒于上述的分析,本發明實施例旨在提供一種用于水陸航行器的分布式水下環境適變感知方法,用以解決現有現有技術中水下環境感知和障礙物識別在不同濁度條件下適應性差、單一傳感器感知能力有限、數據融合效果不佳的問題。方法包括:
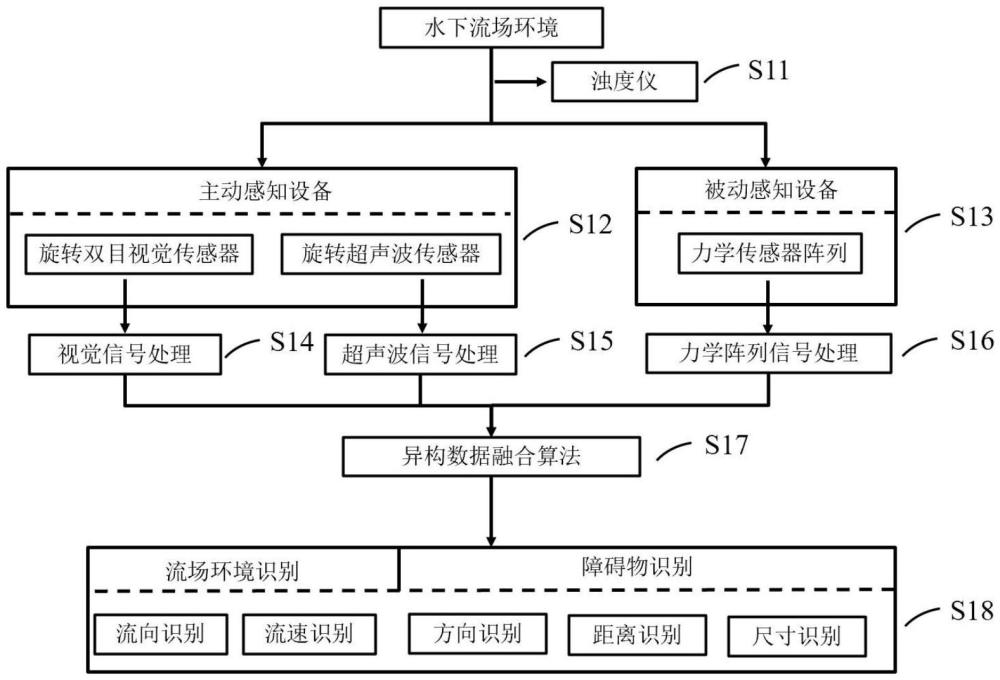
2、s1、基于歷史檢測數據構建濁度代價矩陣,使用濁度儀對當前水下環境進行濁度檢測得到濁度檢測結果;
3、s2、通過預設傳感器獲取目標障礙物的檢測信息,包括:基于雙目視覺傳感器采集目標障礙物的雙目視覺信息,基于超聲波傳感器采集目標障礙物的超聲波信息,基于力學傳感器陣列采集目標障礙物的力學信息;
4、s3、基于雙目視覺信息得到目標障礙物的視覺距離數據、視覺方向數據、視覺尺寸數據,對超聲波信息處理得到目標障礙物的超聲波距離數據、超聲波方向數據、超聲波尺寸數據,對力學信息處理得到目標障礙物的力學方向數據和力學距離數據;
5、s4、基于濁度檢測結果和濁度代價矩陣,通過異構數據融合算法對視覺距離數據、視覺方向數據、視覺尺寸數據、超聲波距離數據、超聲波方向數據、超聲波尺寸數據、力學方向數據和力學距離數據進行融合得到目標障礙物的距離、方向和尺寸。
6、作為本技術的進一步改進,s4進一步包括:
7、基于濁度檢測結果和濁度代價矩陣,確定與當前濁度檢測結果相匹配的濁度代價向量;基于濁度代價向量通過異構數據融合算法對視覺距離數據、視覺方向數據、視覺尺寸數據、超聲波距離數據、超聲波方向數據、超聲波尺寸數據、力學方向數據和力學距離數據進行融合得到目標障礙物的距離、方向和尺寸;
8、所述濁度檢測結果包括輕度、中度和重度。
9、作為本技術的進一步改進,濁度代價矩陣為:
10、
11、其中,u1為輕度濁度代價向量,u2為中度濁度代價向量,u3為重度濁度代價向量;
12、u1=[0.6,0.3,0.1];
13、u2=[0,0.7,0.3];
14、u3=[0,0.6,0.4]。
15、作為本技術的進一步改進,目標障礙物的距離如計算式(1)所示;
16、d=min{min(dv,ds,df),ui·[dv,ds,df]t}??(1)
17、其中,d為目標障礙物的距離,dv,ds,df分別為視覺距離數據、超聲波距離數據和力學距離數據,ui為濁度代價矩陣,i=1、2、3。
18、作為本技術的進一步改進,目標障礙物的方向如計算式(2)所示;
19、θ=ui·[θv,θs,θf]t??(2)
20、其中,θ為目標障礙物的方向,θv,θs,θf分別為視覺方向數據、超聲波方向數據和力學方向數據,ui為濁度代價矩陣,i=1、2、3。
21、作為本技術的進一步改進,目標障礙物的尺寸如計算式(3)所示;
22、l=max{max(lv,ls),ui·[[lv,ls]]t}??(3)
23、其中,l為目標障礙物的尺寸,lv,ls分別為視覺尺寸數據和超聲波尺寸數據,ui為濁度代價矩陣,i=1、2、3。
24、作為本技術的進一步改進,s3中對雙目視覺信息處理得到目標障礙物的視覺距離數據、視覺方向數據、視覺尺寸數據包括:
25、基于雙目視覺傳感器的內參和外參,結合snell定律構建水下成像模型;
26、基于水下成像模型對雙目視覺信息進行復原校正得到校正后的雙目視覺信息;
27、基于校正后的雙目視覺信息構建障礙物的空間三維坐標;
28、基于障礙物的空間三維坐標得到目標障礙物的視覺距離數據和視覺尺寸數據;
29、確定轉臺偏轉方向和車輛行駛方向之間的夾角為目標障礙物的視覺方向數據。
30、作為本技術的進一步改進,s3中對超聲波信息處理得到目標障礙物的超聲波距離數據、超聲波方向數據、超聲波尺寸數據包括:
31、基于超聲波信息計算目標障礙物各位置距離超聲波傳感器的橫向坐標距離和縱向坐標距離;
32、目標障礙物的超聲波方向數據如計算式(4)所示;
33、
34、其中,θs為目標障礙物的超聲波方向數據,lsx為目標障礙物的橫向坐標距離,lsy為目標障礙物的縱向坐標距離;
35、目標障礙物的超聲波尺寸數據如計算式(5)所示;
36、
37、其中,ls為目標障礙物的超聲波尺寸數據;
38、目標障礙物的超聲波方向數據如計算式(6)所示;
39、
40、其中,ds為目標障礙物的超聲波距離數據。
41、作為本技術的進一步改進,基于超聲波信息計算目標障礙物各位置距離超聲波傳感器的橫向坐標距離和縱向坐標距離包括:
42、基于計算式(7)計算目標障礙物各位置距離超聲波傳感器的橫向坐標距離;
43、lsx=|ct/2cos(π/2-ωt)|??(7)
44、基于計算式(8)計算目標障礙物各位置距離超聲波傳感器的縱向坐標距離;
45、lsy=ct1/2sin(π/2-ωt2)??(8)
46、其中,c為超聲波在水中的傳播速度,ω為超聲波傳感器的轉臺轉動角速度,t1為當前發射周期的探測時間,t2為當前次掃描的總時間。
47、作為本技術的進一步改進,s3中對力學信息處理得到目標障礙物的力學方向數據和力學距離數據包括:
48、基于力學信息中力學傳感器陣列采集的壓力最大值計算力學距離數據,如計算式(9)所示;
49、
50、其中,df為力學距離數據,pmax為力學傳感器陣列采集的壓力最大值,ρ為水的密度,vv為水陸航行器速度分量,f為力學傳感器采集頻率;
51、基于傳感器陣列中采集的壓力最大值對應的傳感器位置得到力學方向數據,如計算式(10)所示;
52、θf=180k/n-120??(10)
53、其中,θf為力學方向數據,k為壓力最大值對應的傳感器序號,n為力學傳感器個數,其中,力學傳感器個數為3個,分別編號為1、2、3,角度分別為-6o,o,60度。
54、上述技術方案的有益效果如下:
55、1、本發明通過構建濁度代價矩陣,并結合雙目視覺傳感器、超聲波傳感器和力學傳感器陣列采集的數據,根據不同的濁度條件動態調整傳感器權重,解決了現有技術中水下環境感知在不同濁度條件下適應性差的問題,提高了感知的準確性。
56、2、本發明通過異構數據融合算法整合多種傳感器的數據,充分利用了雙目視覺、超聲波和力學傳感器的信息,顯著提高了障礙物識別的準確性和可靠性,克服了現有技術中單一傳感器感知能力有限的缺陷,能夠全面地識別和定位水下障礙物。
57、3、本發明采用的異構數據融合算法能夠根據實時的濁度檢測結果和濁度代價矩陣,對來自不同傳感器的數據進行有效融合,得到目標障礙物的距離、方向和尺寸信息,解決了現有技術中數據融合效果不佳的問題,提高了水下環境感知的整體性能。
58、本發明中,上述各技術方案之間還可以相互組合,以實現更多的優選組合方案。本發明的其他特征和優點將在隨后的說明書中闡述,并且,部分優點可從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點可通過說明書以及附圖中所特別指出的內容中來實現和獲得。
- 還沒有人留言評論。精彩留言會獲得點贊!