挖掘設備的挖掘路徑的確定方法、裝置、處理器和程序產品與流程
本申請涉及煤炭開采領域,具體而言,涉及一種挖掘設備的挖掘路徑的確定方法、裝置、處理器和程序產品。
背景技術:
1、目前,隨著煤炭開采智能化程度的提高,對井下巷道的掘進效率也提出了較高的要求。
2、在相關技術中,巷道的掘進主要以人工現場操作為主,面對不同巖石條件,掘進機的截割效率和質量完全由工人經驗決定,因此,掘進效率和施工效果受人為因素影響較大,并且掘進工作環境復雜、存在安全隱患,在掘進工作過程中時常會出現高濕、高溫、高濃度粉塵及高噪聲等惡劣環境,作業人員的身體安全得不到保障,存在巷道挖掘路徑的規劃效率低的技術問題。
3、針對上述的問題,目前尚未提出有效的解決方案。
技術實現思路
1、本申請實施例提供了一種挖掘設備的挖掘路徑的確定方法、裝置、處理器和程序產品,以至少解決巷道挖掘路徑的規劃效率低的技術問題。
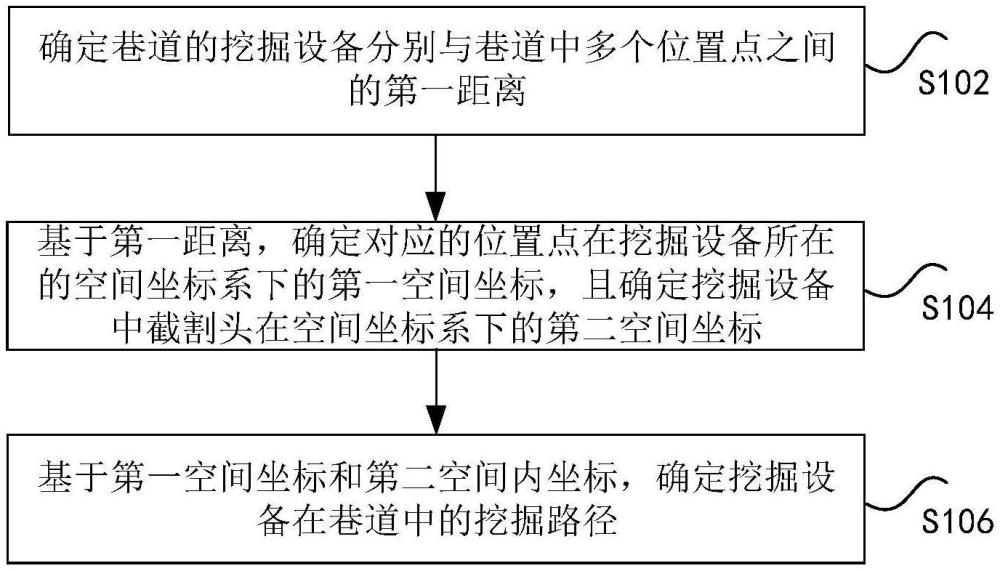
2、根據本申請實施例的一個方面,提供了一種挖掘設備的挖掘路徑的確定方法,該方法可以包括:確定巷道的挖掘設備分別與巷道中多個位置點之間的第一距離;基于第一距離,確定對應的位置點在挖掘設備所在的空間坐標系下的第一空間坐標,且確定挖掘設備中截割頭在空間坐標系下的第二空間坐標;基于第一空間坐標和第二空間坐標,確定挖掘設備在巷道中的挖掘路徑。
3、可選地,基于第一距離,確定對應的多個位置點在挖掘設備所在的空間坐標系下的第一空間坐標,包括:將第一距離轉換為位置點對應的坐標信息;以挖掘設備中激光雷達的固定點為原點,構建得到空間坐標系;基于第一距離和位置點相對于激光雷達的位置信息,確定位置點對應的第一空間坐標。
4、可選地,確定挖掘設備中截割頭在空間坐標系下的第二空間坐標,包括:確定截割頭中截割部驅動桿的移動數據;對移動數據進行轉換,得到第二空間坐標。
5、可選地,基于第一空間坐標和第二空間坐標,確定挖掘設備在巷道中的挖掘路徑,包括:將第一空間坐標和第二空間坐標輸入至路徑規劃模型中進行分析,得到挖掘路徑,其中,路徑規劃模型為基于歷史挖掘路徑訓練得到。
6、可選地,該方法還可以包括:確定巷道中的煤巖分布數據;將煤巖分布數據輸入至路徑規劃模型中進行分析,得到在未來時刻挖掘設備在巷道中的預測挖掘路徑。
7、可選地,確定巷道中的煤巖分布數據,包括:在對巷道進行挖掘的過程中,控制紅外熱成像儀獲取巷道的截割紅外圖像,且獲取所加速傳感器采集到的傳感器信號;利用傳感器信號對截割紅外圖像進行轉換,得到煤巖分布數據。
8、可選地,利用傳感器信號對截割紅外圖像進行轉換,得到煤巖分布數據,包括:調用向量機模型,利用傳感器信號對截割紅外圖像進行轉換,得到煤巖分布數據,其中,向量機模型為基于歷史截割紅外圖像訓練得到。
9、根據本申請實施例的另一方面,還提供了一種挖掘設備的挖掘路徑的確定裝置,該裝置可以包括:第一確定單元,用于確定巷道的挖掘設備分別與巷道中多個位置點之間的第一距離;第二確定單元,用于基于第一距離,確定對應的位置點在挖掘設備所在的空間坐標系下的第一空間坐標,且確定挖掘設備中截割頭在空間坐標系下的第二空間坐標;第三確定單元,用于基于第一空間坐標和第二空間坐標,確定挖掘設備在巷道中的挖掘路徑。
10、根據本申請實施例的另一方面,還提供了一種計算機可讀存儲介質,該計算機可讀存儲介質包括存儲的程序,其中,在程序運行時控制該計算機可讀存儲介質所在設備執行本申請實施例的挖掘設備的挖掘路徑的確定方法。
11、根據本申請實施例的另一方面,還提供了一種處理器,該處理器用于運行程序,其中,程序被該處理器運行時執行本申請實施例的挖掘設備的挖掘路徑的確定方法。
12、根據本申請實施例的另一方面,還提供了一種計算機程序產品,該計算機程序產品包括計算機指令,其中,該計算機指令被處理器執行時實現本申請實施例的挖掘設備的挖掘路徑的確定方法。
13、在本申請實施例中,確定巷道的挖掘設備分別與巷道中多個位置點之間的第一距離;基于第一距離,確定對應的位置點在挖掘設備所在的空間坐標系下的第一空間坐標,且確定挖掘設備中截割頭在空間坐標系下的第二空間坐標;基于第一空間坐標和第二空間坐標,確定挖掘設備在巷道中的挖掘路徑。也就是說,在本申請實施例中,確定挖掘設備與巷道中多個位置點之間的第一距離,基于第一距離,可以確定多個位置點在空間坐標系中的第一空間坐標,基于截割頭在空間坐標系中的第二空間坐標,以及第一空間坐標,可以確定挖掘設備的挖掘路徑,可以控制挖掘設備按照挖掘路徑完成巷道掘進,從而解決了巷道挖掘路徑的規劃效率低的技術問題,實現了提高巷道挖掘路徑的規劃效率低的技術效果。
技術特征:
1.一種挖掘設備的挖掘路徑的確定方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述基于所述第一距離,確定對應的所述多個位置點在所述挖掘設備所在的空間坐標系下的第一空間坐標,包括:
3.根據權利要求1所述的方法,其特征在于,所述確定所述挖掘設備中截割頭在所述空間坐標系下的第二空間坐標,包括:
4.根據權利要求1所述的方法,其特征在于,所述基于所述第一空間坐標和所述第二空間坐標,確定所述挖掘設備在所述巷道中的挖掘路徑,包括:
5.根據權利要求4所述的方法,其特征在于,所述方法還包括:
6.根據權利要求5所述的方法,其特征在于,所述確定所述巷道中的煤巖分布數據,包括:
7.根據權利要求6所述的方法,其特征在于,所述利用所述傳感器信號對所述截割紅外圖像進行轉換,得到所述煤巖分布數據,包括:
8.一種挖掘設備的挖掘路徑的確定裝置,其特征在于,包括:
9.一種處理器,其特征在于,所述處理器用于運行程序,其中,所述程序被所述處理器運行時執行權利要求1至7中任意一項所述的方法。
10.一種計算機程序產品,其特征在于,包括計算機指令,該計算機指令被處理器執行時實現權利要求1至7中任意一項所述的方法。
技術總結
本申請公開了一種挖掘設備的挖掘路徑的確定方法、裝置、處理器和程序產品。其中,該方法包括:確定巷道的挖掘設備分別與巷道中多個位置點之間的第一距離;基于第一距離,確定對應的位置點在挖掘設備所在的空間坐標系下的第一空間坐標,且確定挖掘設備中截割頭在空間坐標系下的第二空間坐標;基于第一空間坐標和第二空間坐標,確定挖掘設備在巷道中的挖掘路徑。本申請解決了巷道挖掘路徑的規劃效率低的技術問題。
技術研發人員:李富強,王飛,劉洋,夏蒙健,孫杰,苗繼軍,趙洪斌,劉文強,李克,史學鋒,陳梓鋒,黃浩,張廷壽,楊金山
受保護的技術使用者:國家能源集團烏海能源有限責任公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!