一種基于多模型協同神經架構搜索的機械異構故障診斷方法及設備
本發明屬于機械故障診斷相關,更具體地,涉及一種基于多模型協同神經架構搜索的機械異構故障診斷方法及設備。
背景技術:
1、在現代化工業生產中,機械設備在各行各業中發揮著重要的作用,它們的智能運維在近幾年受到很多學者和工程師的關注。隨著人工智能的發展,基于深度學習的機械智能故障診斷方法取得了很大的進步,許多實驗室中的旋轉機械數據集,如齒輪和軸承,得到了深入的分析。這些基于數據驅動的故障診斷方法在不斷提高診斷準確率的同時,仍然存在一些局限性。
2、大多數方法聚焦于數據獲取完備的診斷對象,如軸承故障模擬實驗平臺,即深度學習模型的輸入始終為固定的數據形狀和通道維度。很少有研究考慮多設備之間的差異化場景,但在工業中,原數據由于通信異常、傳感器故障和不同下游企業之間診斷能力的差異會出現獲取不完備的情況,通過只有單一類型輸入的深度學習模型難以處理這種不同信號維數的異構故障診斷任務,通常需要構造新的深度學習模型架構來適應不同數據結構和分布的變化,這樣極大增加了時間成本以及計算資源的消耗。
3、基于深度學習的故障診斷方法雖然避免了人工特征提取,但學者們在選擇模型結構和其中的超參數時,一般需要在掌握豐富的專業知識和領域經驗后不斷地進行結構設計和實驗試錯。深度學習模型對于數據集的變化,甚至對于傳感器采集的一個機器不同部件的振動信號都是高度敏感的,在不同的網絡結構中,如何為特定的診斷場景和信號選擇合適的模型,目前研究者們仍然沒有統一的答案。
4、神經結構搜索是一種自動化的設計神經網絡模型的方法,它通過搜索策略和驗證反饋來優化候選網絡,從而獲得適合特定任務的高性能模型。但是,隨著搜索空間的擴大和模型層數的加深,這種方法所消耗的計算資源呈指數級增長,對于一些中小企業來說,智能運維的成本將顯著增加;除此之外,當前主流的神經結構搜索方法通常都是針對特定任務的、對神經網絡的單一結構進行細致的搜索和超參數優化,這種方法在面對多任務時常常不具備優勢,企業在使用網絡搜索時,會出現花費很高的成本來解決一個機器的故障問題。綜上,這些問題阻礙了基于深度學習方法的故障診斷在工業應用中的推廣。
技術實現思路
1、針對現有技術的以上缺陷或改進需求,本發明提供了一種基于多模型協同神經架構搜索的機械異構故障診斷方法及設備,其旨在實現機械設備異構故障診斷的同時提高診斷的準確率。
2、為實現上述目的,按照本發明的一個方面,提供了一種基于多模型協同神經架構搜索的機械異構故障診斷方法,該方法包括以下步驟:
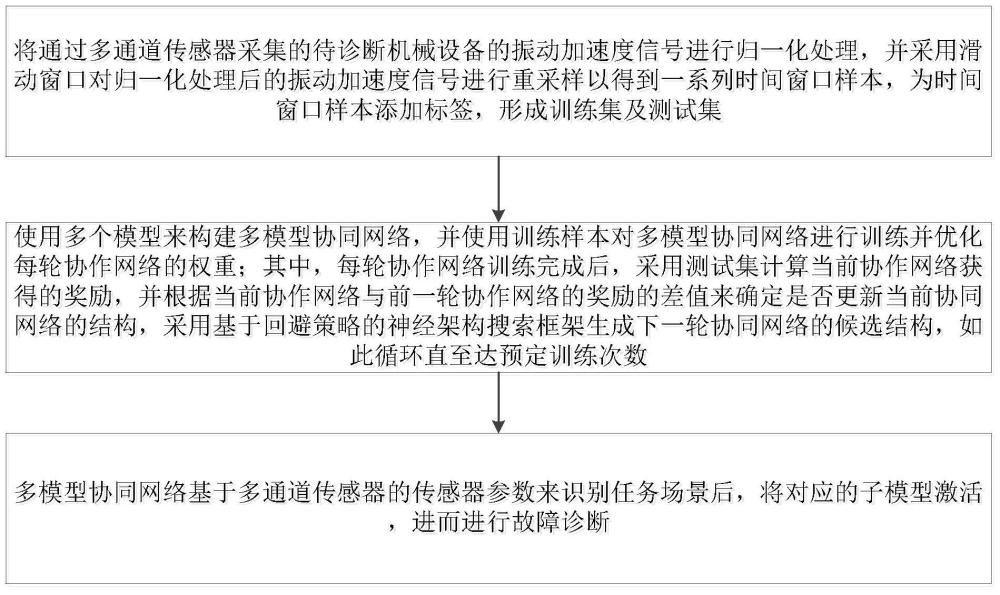
3、(1)將通過多通道傳感器采集的待診斷機械設備的振動加速度信號進行歸一化處理,并采用滑動窗口對歸一化處理后的振動加速度信號進行重采樣以得到一系列時間窗口樣本,為時間窗口樣本添加標簽,形成訓練集及測試集;
4、(2)使用多個模型來構建多模型協同網絡,并使用訓練樣本對多模型協同網絡進行訓練并優化每輪協作網絡的權重;其中,每輪協作網絡訓練完成后,采用測試集計算當前協作網絡獲得的獎勵,并根據當前協作網絡與前一輪協作網絡的獎勵的差值來確定是否更新當前協同網絡的結構,采用基于回避策略的神經架構搜索框架生成下一輪協同網絡的候選結構;
5、(3)多模型協同網絡基于多通道傳感器的傳感器參數來識別任務場景后,將對應的子模型激活,進而進行故障診斷。
6、進一步地,所述訓練集包含全部通道的傳感器數據,所述測試集包含部分或者全部通道的傳感器數據。
7、進一步地,將全通道的訓練樣本分割成多個一維單通道數據,每個子模型通過單通道數據進行特征提取;所有子模型連接到同一個決策網絡。
8、進一步地,對于每個子模型,計算基于多標簽的二分類損失:
9、
10、其中為使用第b個模型對nc類別的第i個樣本的預測值;在協同訓練的過程中,最終的環間損失lin受到各個子模型的影響,表示為:
11、
12、其中ni和b為每輪協同訓練中參與的批量樣本和子模型的數量。
13、進一步地,多模型協同網絡的訓練包括內環學習和基于回避策略的神經架構搜索的外環學習;外環學習包括對訓練好的多模型協同網絡在當前第e個時期的性能評估和第(e+1)個時期的候選多模型協同網絡的生成。
14、進一步地,每個多模型協同網絡架構狀態來源于神經網絡的搜索空間,其中包含n個狀態的潛在組合s={s1,s2,...,sn},每個狀態空間包含兩個方面的信息,即待更新的分支索引模型空間中候選子模型的索引和模型結構
15、進一步地,基于任務信息pj重構狀態為se的多模型協同網絡,測試集樣本對應的設備與訓練集對應的設備不重合。
16、進一步地,平均跨個體準確率的計算公式為:
17、
18、其中為傳感器的索引參數,np為異構任務總數,evl(·)表示經典的神經網絡評價函數。
19、本發明還提供了一種基于多模型協同神經架構搜索的機械異構故障診斷系統,所述故障診斷系統包括存儲器及處理器,所述存儲器儲存有計算機程序,所述處理器執行所述計算機程序時執行如上所述的基于多模型協同神經架構搜索的機械異構故障診斷方法。
20、本發明還提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有機器可執行指令,所述機器可執行指令在被處理器調用和執行時,所述機器可執行指令促使所述處理器實現如上所述的基于多模型協同神經架構搜索的機械異構故障診斷方法。
21、總體而言,通過本發明所構思的以上技術方案與現有技術相比,本發明提供的基于多模型協同神經架構搜索的機械異構故障診斷方法及設備主要具有以下有益效果:
22、1.本發明通過采集到的多通道的振動加速度信號作為多模型訓練和測試的基礎,對于每個通道的振動加速度信號選擇單獨的模型用于決策,降低了單一模型對于特定數據的過擬合風險,顯著提高了機械設備故障診斷的準確率,且能夠同時實現機械異構故障的診斷。
23、2.采用基于回避策略的神經架構搜索框架生成下一輪協同網絡的候選結構,進而無需復雜的專家知識即可實現端到端診斷,極大地減少了搜索時間和計算消耗,并且無需從頭開始提煉模型,同時能夠防止模型陷入局部最優的情況,提高搜索效率。
24、3.測試集樣本對應的設備與訓練集對應的設備不重合,模型可以通過已知機械對任意同型號的未知機械進行故障診斷,極大地推動了基于深度學習的故障診斷在工業場景中的應用。
25、4.本發明直接將多個高級模型結構作為搜索的基本元素,這大大減少了搜索空間和計算成本,同時充分利用了垂直領域的知識和成果。同時,內環學習只訓練和更新修改后的子模型結構和權值,其余分支被凍結以進一步降低計算成本。
技術特征:
1.一種基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于,該方法包括以下步驟:
2.如權利要求1所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:所述訓練集包含全部通道的傳感器數據,所述測試集包含部分或者全部通道的傳感器數據。
3.如權利要求1所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:將全通道的訓練樣本分割成多個一維單通道數據,每個子模型通過單通道數據進行特征提取;所有子模型連接到同一個決策網絡。
4.如權利要求3所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:對于每個子模型,計算基于多標簽的二分類損失:
5.如權利要求1所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:多模型協同網絡的訓練包括內環學習和基于回避策略的神經架構搜索的外環學習;外環學習包括對訓練好的多模型協同網絡在當前第e個時期的性能評估和第(e+1)個時期的候選多模型協同網絡的生成。
6.如權利要求5所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:每個多模型協同網絡架構狀態來源于神經網絡的搜索空間,其中包含n個狀態的潛在組合s={s1,s2,...,sn},每個狀態空間包含兩個方面的信息,即待更新的分支索引模型空間中候選子模型的索引和模型結構
7.如權利要求1所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:基于任務信息pj重構狀態為se的多模型協同網絡,測試集樣本對應的設備與訓練集對應的設備不重合。
8.如權利要求1所述的基于多模型協同神經架構搜索的機械異構故障診斷方法,其特征在于:平均跨個體準確率的計算公式為:
9.一種基于多模型協同神經架構搜索的機械異構故障診斷系統,其特征在于:所述故障診斷系統包括存儲器及處理器,所述存儲器儲存有計算機程序,所述處理器執行所述計算機程序時執行權利要求1-8任一項所述的基于多模型協同神經架構搜索的機械異構故障診斷方法。
10.一種計算機可讀存儲介質,其特征在于:所述計算機可讀存儲介質存儲有機器可執行指令,所述機器可執行指令在被處理器調用和執行時,所述機器可執行指令促使所述處理器實現權利要求1-8任一項所述的基于多模型協同神經架構搜索的機械異構故障診斷方法。
技術總結
本發明屬于機械故障診斷相關技術領域,其公開了一種基于多模型協同神經架構搜索的機械異構故障診斷方法及設備,步驟為:(1)對振動加速度信號進行處理以形成訓練集及測試集;(2)構建多模型協同網絡,并使用訓練樣本對多模型協同網絡進行訓練并優化每輪協作網絡的權重;每輪協作網絡訓練完成后,采用測試集計算當前協作網絡獲得的獎勵,并根據當前協作網絡與前一輪協作網絡的獎勵的差值來確定是否更新當前協同網絡的結構,采用基于回避策略的神經架構搜索框架生成下一輪協同網絡的候選結構;(3)多模型協同網絡基于多通道傳感器的傳感器參數來識別任務場景后,進而進行故障診斷。本發明實現機械設備異構故障診斷的同時提高診斷的準確率。
技術研發人員:沈衛明,何藝鳴,楊雄飛
受保護的技術使用者:華中科技大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!