一種船舶“新三樣”貨物運輸水上中轉(zhuǎn)一單制管理系統(tǒng)的制作方法
本發(fā)明涉及港口管理,具體是涉及一種船舶“新三樣”貨物運輸水上中轉(zhuǎn)一單制管理系統(tǒng)。
背景技術(shù):
1、長三角港口群的核心港口是長江流域江海轉(zhuǎn)運便捷的門戶港,集裝箱水中轉(zhuǎn)運輸量已達其總吞吐量的58%。長三角“新三樣”貨物水水中轉(zhuǎn)“一單制”,是航運管理模式的創(chuàng)新。在危險貨物水路運輸監(jiān)管服務(wù)領(lǐng)域,由始發(fā)港進行檢測,中轉(zhuǎn)港采用非必要不開箱的模式進行信息確認(rèn),并進行船舶適載許可和貨物適運報告手續(xù)辦理,運用信息化手段互聯(lián)互通,實現(xiàn)“一港管理、一程申報、一單到底”。“一單制”的目的是簡化管理,加快物流速度,避免貨船擁堵。
2、但現(xiàn)有的一單制管理系統(tǒng)對于中轉(zhuǎn)港的貨船調(diào)控不足,貨船放行速度固定,導(dǎo)致仍然可能出現(xiàn)貨船擁堵的情況,一單制管理存在較大的提升空間。
技術(shù)實現(xiàn)思路
1、為解決上述技術(shù)問題,提供一種船舶“新三樣”貨物運輸水上中轉(zhuǎn)一單制管理系統(tǒng),本技術(shù)方案解決了上述背景技術(shù)中提出的現(xiàn)有的一單制管理系統(tǒng)對于中轉(zhuǎn)港的貨船調(diào)控不足,貨船放行速度固定,導(dǎo)致仍然可能出現(xiàn)貨船擁堵的情況,一單制管理存在較大的提升空間的問題。
2、為達到以上目的,本發(fā)明采用的技術(shù)方案為:
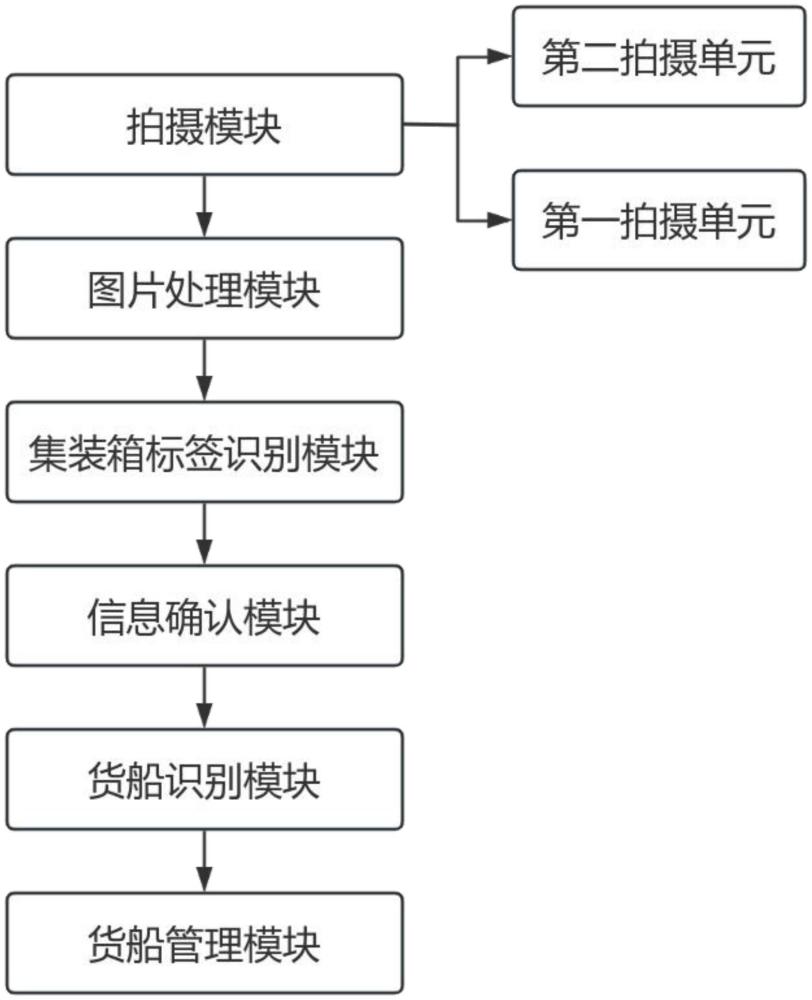
3、一種船舶“新三樣”貨物運輸水上中轉(zhuǎn)一單制管理系統(tǒng),包括:
4、拍攝模塊,所述拍攝模塊包括第二拍攝單元和第一拍攝單元,所述第二拍攝單元設(shè)置在中轉(zhuǎn)港的進口,所述第一拍攝單元設(shè)置在中轉(zhuǎn)港內(nèi),所述第二拍攝單元對等待進入中轉(zhuǎn)港的貨船進行掃描,得到第二貨船圖片,第一拍攝單元對中轉(zhuǎn)港內(nèi)的貨船進行掃描,得到第一貨船圖片;
5、圖片處理模塊,所述圖片處理模塊用于接受上傳的第一貨船圖片和第二貨船圖,對上傳的第一貨船圖片和第二貨船圖進行預(yù)處理,得到預(yù)處理圖片,所述預(yù)處理包括圖像去噪和圖像增強;
6、集裝箱標(biāo)簽識別模塊,所述集裝箱標(biāo)簽識別模塊用于對預(yù)處理后的圖片進行集裝箱標(biāo)簽提取,獲取集裝箱標(biāo)簽信息;
7、信息確認(rèn)模塊,所述信息確認(rèn)模塊對集裝箱標(biāo)簽信息進行識別,得到始發(fā)港的裝箱信息,對始發(fā)港的裝箱信息進行確認(rèn),當(dāng)信息無誤時,則進行船舶適載許可和貨物適運報告手續(xù)辦理,并對中轉(zhuǎn)港的貨船進行放行,當(dāng)信息存在偏差時,對集裝箱進行開箱檢測;
8、貨船識別模塊,所述貨船識別模塊對第一貨船圖片進行識別,得到中轉(zhuǎn)港內(nèi)貨船的第一等待時間,對第二貨船圖片進行識別,得到中轉(zhuǎn)港外貨船的第二等待時間;
9、貨船管理模塊,所述貨船管理模塊計算空船位的數(shù)量,基于空船位的數(shù)量,對貨船和信息確認(rèn)模塊進行控制。
10、優(yōu)選的,所述圖像去噪包括如下步驟:
11、對第一貨船圖片和第二貨船圖片進行自適應(yīng)小波閾值去噪;
12、通過構(gòu)建小波系數(shù)的概率模型,利用貝葉斯估計確定最優(yōu)小波閾值;
13、對小波系數(shù)進行自適應(yīng)閾值處理,并進行小波重構(gòu),得到去噪后的第一貨船圖片和第二貨船圖片。
14、優(yōu)選的,所述圖像增強包括如下步驟:
15、對去噪后的第一貨船圖片和第二貨船圖片進行自適應(yīng)直方圖均衡化處理;
16、通過計算去噪后的第一貨船圖片和第二貨船圖片的灰度直方圖,確定局部區(qū)域的累積分布函數(shù);
17、基于所述累積分布函數(shù),自適應(yīng)地調(diào)整局部區(qū)域的灰度映射關(guān)系,得到增強后的第一貨船圖片和第二貨船圖片。
18、優(yōu)選的,所述對預(yù)處理后的圖片進行集裝箱標(biāo)簽提取,獲取集裝箱標(biāo)簽信息包括如下步驟:
19、以行為單位,對集裝箱標(biāo)簽區(qū)域進行區(qū)域標(biāo)注;
20、將標(biāo)注好的集裝箱標(biāo)簽區(qū)域組成訓(xùn)練集,通過目標(biāo)檢測模型進行訓(xùn)練,直至收斂;
21、將分割后的集裝箱標(biāo)簽區(qū)域塊放入訓(xùn)練好的目標(biāo)檢測模型進行集裝箱標(biāo)簽區(qū)域的目標(biāo)檢測,獲取第二貨船圖片中集裝箱標(biāo)簽區(qū)域的坐標(biāo)并輸出;
22、基于完整的集裝箱標(biāo)簽區(qū)域的坐標(biāo),獲取第二貨船圖片中每個完整的集裝箱標(biāo)簽區(qū)域;
23、基于第二貨船圖片中集裝箱標(biāo)簽內(nèi)容,標(biāo)注第二貨船圖片的區(qū)域坐標(biāo),并將其組成訓(xùn)練集;
24、對基于深度學(xué)習(xí)的注意力機制的cnn與lstm組成的混合模型進行訓(xùn)練,直至收斂為止;
25、將分割后的第二貨船圖片塊的集裝箱標(biāo)簽區(qū)域放入訓(xùn)練完成的混合模型進行集裝箱標(biāo)簽識別,獲取第二貨船圖片中具體的集裝箱標(biāo)簽信息。
26、優(yōu)選的,所述對始發(fā)港的裝箱信息進行確認(rèn)包括如下步驟:
27、獲取始發(fā)港的裝箱信息,裝箱信息由集裝箱在貨船上的位置、集裝箱內(nèi)部貨物和集裝箱重量構(gòu)成;
28、核對集裝箱實際位置與裝箱信息中的集裝箱在貨船上的位置的一致性;
29、在不開箱的情況下,核對裝箱信息中的集裝箱內(nèi)部貨物的合規(guī)性;
30、通過吊裝,核對集裝箱實際重量與裝箱信息中的集裝箱重量的一致性;
31、當(dāng)存在不合規(guī)或不一致的情況,則信息存在偏差,否則,信息無誤。
32、優(yōu)選的,所述對第一貨船圖片進行識別,得到中轉(zhuǎn)港內(nèi)貨船的第一等待時間包括如下步驟:
33、按時間順序,獲取至少一個第一貨船圖片,獲取相鄰所述第一貨船圖片的采集間隔,作為第一間隔時間;
34、選擇中轉(zhuǎn)港內(nèi)貨船的其中一個,作為第一目標(biāo)貨船;
35、在第一貨船圖片中進行第一目標(biāo)貨船識別,將出現(xiàn)第一目標(biāo)貨船的第一貨船圖片,作為第一目標(biāo)圖片;
36、使用第一時間公式,計算第一目標(biāo)貨船的第一個體時間;
37、當(dāng)?shù)谝荒繕?biāo)貨船遍歷中轉(zhuǎn)港內(nèi)貨船時,得到中轉(zhuǎn)港內(nèi)每個貨船的第一個體時間;
38、對中轉(zhuǎn)港內(nèi)貨船的第一個體時間取均值,得到中轉(zhuǎn)港內(nèi)貨船的第一等待時間;
39、第一時間公式如下:
40、a=(a-1)×b
41、其中,a為第一個體時間,a為第一目標(biāo)圖片的總個數(shù),b為第一間隔時間。
42、優(yōu)選的,所述對第二貨船圖片進行識別,得到中轉(zhuǎn)港外貨船的第二等待時間包括以下步驟:
43、按時間順序,獲取至少一個第二貨船圖片,獲取相鄰所述第二貨船圖片的采集間隔,作為第二間隔時間;
44、選擇等待進入中轉(zhuǎn)港的貨船的其中一個,作為第二目標(biāo)貨船;
45、在第二貨船圖片中進行第二目標(biāo)貨船識別,將出現(xiàn)第二目標(biāo)貨船的第二貨船圖片,作為第二目標(biāo)圖片;
46、使用第二時間公式,計算第二目標(biāo)貨船的第二個體時間;
47、當(dāng)?shù)诙繕?biāo)貨船遍歷等待進入中轉(zhuǎn)港的貨船時,得到等待進入中轉(zhuǎn)港的每個貨船的第二個體時間;
48、對等待進入中轉(zhuǎn)港的貨船的第二個體時間取均值,得到中轉(zhuǎn)港外貨船的第二等待時間;
49、第二時間公式如下:
50、b=(c-1)×d
51、其中,b為第二個體時間,c為第二目標(biāo)圖片的總個數(shù),d為第二間隔時間。
52、優(yōu)選的,所述計算空船位的數(shù)量包括如下步驟:
53、基于歷史數(shù)據(jù),獲取“新三樣”貨物運輸?shù)呢洿钠骄嫉孛娣e;
54、每間隔預(yù)設(shè)時間,采集中轉(zhuǎn)港內(nèi)未被貨船的區(qū)域面積,采集次數(shù)為預(yù)設(shè)次數(shù);
55、對至少一個區(qū)域面積取均值,得到區(qū)域平均面積;
56、區(qū)域平均面積除以平均占地面積,得到空船位的數(shù)量。
57、優(yōu)選的,所述基于空船位的數(shù)量,對貨船和信息確認(rèn)模塊進行控制包括以下步驟:
58、對第二等待時間進行實時監(jiān)測,并對第二等待時間關(guān)于當(dāng)前時間進行擬合,得到第二擬合函數(shù),對第二擬合函數(shù)求導(dǎo),得到第二導(dǎo)函數(shù);
59、將當(dāng)前時間代入第二導(dǎo)函數(shù),得到第二等待時間變化率;
60、基于歷史數(shù)據(jù),形成預(yù)設(shè)值;
61、當(dāng)?shù)诙却龝r間變化率大于預(yù)設(shè)值時,則加速貨船進入中轉(zhuǎn)港內(nèi)的流程,直到第二等待時間變化率不超過預(yù)設(shè)值為止;
62、在加速貨船進入中轉(zhuǎn)港內(nèi)后,監(jiān)測空船位的變化率,當(dāng)監(jiān)測空船位的變化率小于0時,加快信息確認(rèn)模塊的確認(rèn)速度,直到監(jiān)測空船位的變化率不小于0為止;
63、對第一等待時間進行實時監(jiān)測,并對第一等待時間關(guān)于當(dāng)前時間進行擬合,得到第一擬合函數(shù),對第一擬合函數(shù)求導(dǎo),得到第一導(dǎo)函數(shù);
64、將當(dāng)前時間代入第一導(dǎo)函數(shù),得到第一等待時間變化率;
65、當(dāng)?shù)谝坏却龝r間變化率大于預(yù)設(shè)值時,則加快信息確認(rèn)模塊的確認(rèn)速度,直到第一等待時間變化率不超過預(yù)設(shè)值為止。
66、優(yōu)選的,所述基于歷史數(shù)據(jù),形成預(yù)設(shè)值包括如下步驟:
67、基于歷史數(shù)據(jù)獲取每天到達中轉(zhuǎn)港的貨船平均數(shù)量;
68、24小時除以貨船平均數(shù)量,得到貨船平均時間間隔;
69、形成預(yù)設(shè)值,滿足于預(yù)設(shè)值與貨船平均時間間隔相乘小于估計值,估計值為貨船平均時間間隔減去第一等待時間和貨船平均時間間隔減去第二等待時間中的較小者。
70、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果在于:
71、通過設(shè)置集裝箱標(biāo)簽識別模塊、信息確認(rèn)模塊、貨船識別模塊和貨船管理模塊,對貨船進行一單制的信息確認(rèn),并對滿足檢測標(biāo)準(zhǔn)的貨船辦理相關(guān)手續(xù),并予以放行,在整個過程中,對進入中轉(zhuǎn)港和中轉(zhuǎn)港外的貨船的排隊情況進行密切監(jiān)測,對可能發(fā)生擁堵的情況進行及時調(diào)整,在調(diào)整中,通過預(yù)設(shè)值作為判斷依據(jù),并根據(jù)空船位的數(shù)量的變化情況進行調(diào)整,由此,能保證中轉(zhuǎn)港內(nèi)外都不會發(fā)生嚴(yán)重的擁堵,由此,能將一單制的效果最大限度的發(fā)揮。
- 還沒有人留言評論。精彩留言會獲得點贊!