一種基于圖像識別的地鐵保護區違法施工識別檢測方法與流程
本發明涉及圖像識別,具體涉及一種基于圖像識別的地鐵保護區違法施工識別檢測方法。
背景技術:
1、基于圖像識別的地鐵保護區違法施工識別檢測,是指利用圖像識別技術對地鐵保護區范圍內可能存在的非法施工行為進行監測和判斷,并通過電子哨兵的方式實現全天候、高精度的自動化監管。地鐵保護區通常是指地鐵線路周邊一定范圍內的區域,該區域內的施工活動可能對地鐵設施的安全穩定構成威脅。電子哨兵作為智能化監控節點,通過對現場圖像或視頻的實時采集和分析,能夠自動檢測未授權或不符合規范的施工活動,并主動發出預警或啟動相應防護措施。例如,在地鐵保護區內的一處工地,安裝了智能電子哨兵攝像頭。這些攝像頭不僅可以全天候捕捉高清圖像,還具備智能分析和邊緣計算能力。它們會實時傳輸數據至圖像識別系統,通過算法識別挖掘設備、吊裝作業等特定施工行為。如果電子哨兵發現某區域存在未經過審批的挖掘機操作,會立即將其標記為異常,并自動向管理部門發送報警信號,同時記錄行為時間和具體位置,便于快速定位和處理。這種電子哨兵技術結合圖像識別算法,不僅大幅減少人工巡查的成本,還顯著提高了保護區內施工監管的效率和精準度,有效降低了地鐵設施運營風險。
2、現有技術存在以下不足之處:
3、施工方可能通過在設備表面覆蓋特殊材料,使其僅反射特定波長的光(如紅外或紫外),從而有效避開智能電子哨兵攝像頭的檢測。這些材料可以減少設備在可見光波段的特征反射,或改變其外觀紋理,使得圖像識別算法無法有效提取關鍵特征。例如,挖掘機可能看起來像普通物體,或者在監控視頻中變得模糊不清。此外,如果智能電子哨兵攝像頭的光譜感知范圍受限,無法檢測偽裝材料導致的光譜特性變化,違法施工設備可能在監控系統中“隱形”,使系統無法定位和識別關鍵設備的偽裝行為。這將直接導致對地鐵保護區內的違法施工行為無法及時發現,嚴重削弱監控系統的可靠性和安全性,可能最終引發地鐵設施損壞、運營中斷等重大安全隱患。
技術實現思路
1、本發明的目的是提供一種基于圖像識別的地鐵保護區違法施工識別檢測方法,以解決背景技術中不足。
2、為了實現上述目的,本發明提供如下技術方案:一種基于圖像識別的地鐵保護區違法施工識別檢測方法,包括以下步驟:
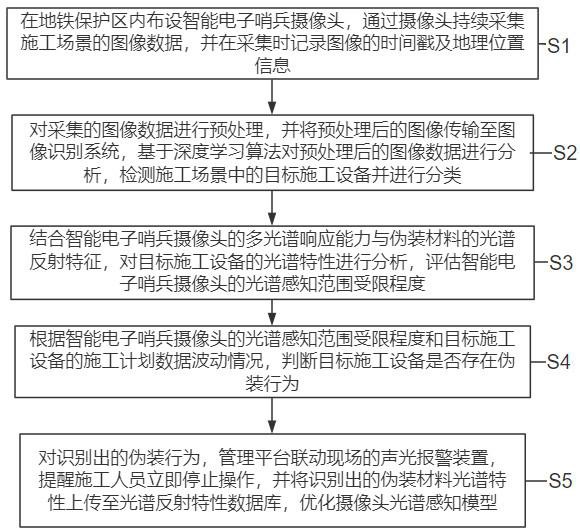
3、s1:在地鐵保護區內布設智能電子哨兵攝像頭,通過攝像頭持續采集施工場景的圖像數據,并在采集時記錄圖像的時間戳及地理位置信息;
4、s2:對采集的圖像數據進行預處理,并將預處理后的圖像傳輸至圖像識別系統,基于深度學習算法對預處理后的圖像數據進行分析,檢測施工場景中的目標施工設備并進行分類;
5、s3:結合智能電子哨兵攝像頭的多光譜響應能力與偽裝材料的光譜反射特征,對目標施工設備的光譜特性進行分析,評估智能電子哨兵攝像頭的光譜感知范圍受限程度;
6、s4:根據智能電子哨兵攝像頭的光譜感知范圍受限程度和目標施工設備的施工計劃數據波動情況,判斷目標施工設備是否存在偽裝行為;
7、s5:對識別出的偽裝行為,管理平臺聯動現場的聲光報警裝置,提醒施工人員立即停止操作,并將識別出的偽裝材料光譜特性上傳至光譜反射特性數據庫,優化攝像頭光譜感知模型。
8、優選的,s3中,對智能電子哨兵攝像頭的多光譜響應能力進行分析后生成攝像頭光譜響應異常指數,攝像頭光譜響應異常指數的獲取方法為:
9、收集攝像頭的光譜響應數據矩陣x,其中每一行代表不同攝像頭在各波長下的光譜響應曲線;將矩陣x的每列進行標準化:;為標準化后的數據,為第j列的均值,為第j列的標準差,表示矩陣x中的元素,位于第i行、第j列的位置,計算標準化數據矩陣z的協方差矩陣c:;式中,t為矩陣轉置,是一個n×n的矩陣,表示各波段間的協方差;對協方差矩陣c進行特征值分解,得到特征值和對應的特征向量;分解表達式為:;特征值表示第k主成分的方差貢獻度,特征向量表示第k主成分的方向;
10、將標準化后的數據z投影到前p個主成分:;y為數據在主成分空間中的表示,大小為m×p,為包含前p個特征向量的矩陣,大小為n×p;計算每個樣本在主成分空間中的攝像頭光譜響應異常指數,表達式為:;式中,dfc為攝像頭光譜響應異常指數,為第i個樣本的主成分向量,大小為1×p,為所有樣本在主成分空間的均值向量,大小為1×p,s為主成分空間中的協方差矩陣,大小為p×p。
11、優選的,s3中,對偽裝材料的光譜反射特征進行分析后生成光譜反射率偏差指數,光譜反射率偏差指數的獲取方法為:
12、設偽裝材料的光譜反射率曲線為,其中表示在第w個波長處的反射率;設參考標準光譜反射率曲線為,其中表示在第m個波長處的反射率;
13、定義光譜反射率在某波長點的局部距離:;為偽裝材料的光譜反射率曲線q在第a波長點與參考光譜反射率曲線r在第b波長點的局部距離,構建大小為w×m的累積距離矩陣d,其中每個元素d(a,b)表示從起始點到當前點的最小累積距離,計算公式為:;邊界條件為;v為一個索引,用于表示累積距離計算中的累加過程,從矩陣右下角d(w,m)開始,沿累積距離最小的路徑回溯,直到到達起始點d(1,1):路徑記為,其中l為路徑長度;根據累積路徑p的累積距離d(w,m)計算光譜反射率偏差值,表達式為:;式中,edh為光譜反射率偏差指數。
14、優選的,s3中,評估智能電子哨兵攝像頭的光譜感知范圍受限程度,具體為:將攝像頭光譜響應異常指數和光譜反射率偏差指數轉換為綜合特征向量,將綜合特征向量作為機器學習模型的輸入,機器學習模型以每組綜合特征向量預測智能電子哨兵攝像頭的光譜感知范圍受限程度評分值標簽為預測目標,以最小化對所有智能電子哨兵攝像頭的光譜感知范圍受限程度評分值標簽的預測誤差之和作為訓練目標,對機器學習模型進行訓練,直至預測誤差之和達到收斂時停止模型訓練,根據模型輸出結果確定智能電子哨兵攝像頭的光譜感知范圍受限程度評分值,其中,機器學習模型為多項式回歸模型。
15、優選的,將獲取到的智能電子哨兵攝像頭的光譜感知范圍受限程度評分值與梯度標準閾值進行比較,梯度標準閾值包括第一標準閾值和第二標準閾值,且第一標準閾值小于第二標準閾值,將智能電子哨兵攝像頭的光譜感知范圍受限程度評分值分別與第一標準閾值和第二標準閾值進行對比;
16、若智能電子哨兵攝像頭的光譜感知范圍受限程度評分值大于第二標準閾值,說明智能電子哨兵攝像頭的光譜感知范圍受限程度高,此時生成一級預警信號;
17、若智能電子哨兵攝像頭的光譜感知范圍受限程度評分值大于或等于第一標準閾值且小于或等于第二標準閾值,說明智能電子哨兵攝像頭的光譜感知范圍受限程度居中,此時生成二級預警信號;
18、若智能電子哨兵攝像頭的光譜感知范圍受限程度評分值小于第一標準閾值,說明智能電子哨兵攝像頭的光譜感知范圍受限程度低,此時生成三級預警信號。
19、優選的,s4中,對目標施工設備的實際施工行為與預定施工計劃之間的時間偏差情況進行分析后生成施工時間偏差值,施工時間偏差值的獲取方法為:
20、獲取實際施工時間序列,表示為向量,其中,是施工設備在第q個時間段的起始或結束時間點;
21、獲取預定施工計劃時間序列,表示為向量,其中是第q個計劃時間段的起始或結束時間點,計算實際施工時間向量與預定施工計劃時間向量之間的歐幾里得距離:;式中,d為第q個計劃時間段內的施工時間偏差值;如果施工行為分為多個任務段,則需對每個任務段單獨計算偏差,并累加:;式中,為施工時間偏差值,g為任務段的總數,為第h個任務段的時間點數量。
22、優選的,將智能電子哨兵攝像頭的光譜感知范圍受限程度評分值lw和施工時間偏差值作為模糊邏輯的輸入項,將目標施工設備是否存在偽裝行為作為輸出項,目標施工設備偽裝行為的判斷結果包括:無偽裝行為,可能存在偽裝行為和明確存在偽裝行為;
23、定義輸入項和輸出項的模糊集合;
24、使用三角形或梯形隸屬函數表示輸入和輸出模糊集合的隸屬度;
25、根據輸入項與輸出項之間的關系,建立模糊規則庫;
26、每條規則的輸出結果按照激活強度賦予權重;
27、將模糊結果轉換為明確的輸出值;
28、根據去模糊化的結果,判斷目標施工設備是否存在偽裝行為:
29、:無偽裝行為;:可能存在偽裝行為;:明確存在偽裝行為。
30、在上述技術方案中,本發明提供的技術效果和優點:
31、1、本發明通過結合智能電子哨兵攝像頭、多光譜響應能力、深度學習算法和模糊邏輯,實現了對地鐵保護區內施工設備的全面監控與精準分析。通過攝像頭采集圖像數據并對目標施工設備進行檢測分類,結合光譜感知范圍受限程度評估和施工計劃數據波動分析,能夠快速判斷施工設備是否存在偽裝行為。一旦識別出偽裝行為,系統生成分級預警信號,并通過聲光報警裝置及時提醒施工人員停止操作,同時上傳偽裝材料的光譜特性以動態優化檢測模型,從而提升系統對新型偽裝行為的檢測能力。
32、2、本發明有效解決了現有技術中因偽裝材料導致的監控盲區和光譜感知受限問題,顯著提高了地鐵保護區內違法施工行為檢測的精準性和效率,降低了地鐵設施安全風險。同時,采用機器學習和模糊邏輯相結合的分析方法,使系統具備高度的適應性和靈活性,能夠應對復雜多變的施工環境,為地鐵保護區的安全管理提供了智能化、可擴展的技術支持。
- 還沒有人留言評論。精彩留言會獲得點贊!